
Compact Scanning Tunneling Microscope with Large Scale Searching Capability for Mmultidisciplinary Applications
2016-11-24 07:31WenjieMengQiWngJingZhngYubinHouQingyouLuHighMgnetiFieldLbortoryChineseAdemyofSienesndUniversityofSienendTehnologyofChinHefei230026ChinbHefeiNtionlLbortoryforPhysilSienestheMirosleUniversityofSienendTehnologyof
Wen-jie Meng,Qi Wng,Jing Zhng,Yu-bin Hou,Qing-you Lu,b,d∗.High Mgneti Field Lbortory,Chinese Ademy of Sienes nd University of Siene nd Tehnology of Chin,Hefei 230026,Chinb.Hefei Ntionl Lbortory for Physil Sienes t the Mirosle,University of Siene nd Tehnology of Chin,Hefei 230026,Chin.Reserh Center of Lser Fusion,Chin Ademy of Engineering Physis,Minyng 621900,Chin d.Collbortive Innovtion Center of Advned Mirostrutures,Nnjing University,Nnjing 210093, Chin
Compact Scanning Tunneling Microscope with Large Scale Searching Capability for Mmultidisciplinary Applications
Wen-jie Menga,Qi Wangc,Jing Zhanga,Yu-bin Houa,Qing-you Lua,b,d∗
a.High Magnetic Field Laboratory,Chinese Academy of Sciences and University of Science and Technology of China,Hefei 230026,China
b.Hefei National Laboratory for Physical Sciences at the Microscale,University of Science and Technology of China,Hefei 230026,China
c.Research Center of Laser Fusion,China Academy of Engineering Physics,Mianyang 621900,China d.Collaborative Innovation Center of Advanced Microstructures,Nanjing University,Nanjing 210093, China
We present the design and performance of a home-built scanning tunneling microscope (STM),which is compact(66 mm tall and 25 mm in diameter),yet equipped with a 3D atomic precision piezoelectric motor in which the Z coarse approach relies on a high simplicity friction-type walker(of our own invention)driven by an axially cut piezoelectric tube. The walker is vertically inserted in a piezoelectric scanner tube(PST)with its brim laying flat on the PST end as the inertial slider(driven by the PST)for the XY(sample plane) motion.The STM is designed to be capable of searching rare microscopic targets(defects, dopants,boundaries,nano-devices,etc.)in a macroscopic sample area(square millimeters) under extreme conditions(low temperatures,strong magnetic fields,etc.)in which it fits. It gives good atomic resolution images after scanning a highly oriented pyrolytic graphite sample in air at room temperature.
Scanning tunneling microscope,Large scale searching,Air STM,Electrochemical STM
I.INTRODUCTION
It has been about 30 years since the first atomic resolution scanning tunneling microscope(STM)was invented[1].In such a pretty long history,basic and ambient condition STMs are well developed and routinely used[2−4].Its current development trend has been towards extreme conditions(low temperatures,strong magnetic fields,etc.)and high performances(low drifts, high precisions,etc.).Typically,these conditions require that the STM should be very compact so that it can be housed in a very limited extreme-condition space while having low drifts and high tip-sample positioning precisions.This is however severely conflicting with another highly wanted capability of searching large sample area[5,6].
The importance of this searching capability is that it allows us to actively look for specific microscopic features such as defects,dopants,nano-devices,and grain boundaries,etc.,around which important phenomena (e.g.the pinning of superconducting vortices by defects [7],the quasiparticle scattering resonances at dopant sites[8],etc.) may happen.These important local features or phenomena may be sufficiently rare on the sample and the opportunity of finding them within the maximum scan range(normally a few squire microns) is low,meaning that the important phenomena will be missed if the image scan can only be done at the fix place on the sample.
We have demonstrated an electrochemical STM(ECSTM)in a previous study[9],which showed great performance of high stability,low drifting rate,and small leakage current.Nevertheless,like many other reported EC-STMs[10],the scan area was relativity small,typically within hundreds of nanometers.Because of this limitation,we suffered a big defeat in using it to search for special and rare locations such as active sites or defects,which are important in the studies of local electrochemical or catalytic reactions[11].We were facing the same difficulty when we used the EC-STM to scan biological molecules in solution(which resembles the essential physiological conditions[12])since the EC-STM does not have large area searching capability,which becomes particularly important when we used it to image rare but important features.This triggers our effort in building an STM with large area searching capability. We believe that this is important not only in EC-STM, but also in many other applications such as in imaging nano structures,etc.We can even imagine thatequipped with such a large area searching capability,it is possible to implement automatic feature searching in the future with the aid of specially programmed software.
∗Author to whom correspondence should be addressed.E-mail: qxl@ustc.edu.cn
To search in a large(macroscopic)sample area,at least a 2D[13]stepping motor is needed in which one dimensional stepping motion is for coarse approach and the remaining stepping motion is for the in-sampleplane searching.In this case,only a narrow zone across the sample surface is searched.To implement a 2D sample area searching,a 3D stepping motor is hence needed, which becomes very complicated with a size too big to fit in the extreme conditions.The increased size will also result in greater drifts and instability.
In this work,we present a novel design STM showing large scale searching capability,high compactness(only 25 mm in diameter),symmetry and extreme-condition compatibility(well fit,for example,the 52 mm cold bore 20 Tesla solenoid superconducting magnets of Oxford Instruments).The atomically resolved highly oriented pyrolytic graphite(HOPG)images taken by this STM in air at room temperature confirm its atomic level positioning precisions in all the three degrees of freedom.The 3D piezoelectric motor proposed in this STM can be surely used in other SPM types(AFM,MFM, SNOM,etc.)or different fields(mirror positioning in modern optics and DNA manipulations,for instance).
II.STM DESIGN
A cross-sectional view of our STM is shown in Fig.1, in which the materials(all are ultrahigh vacuum and low temperature compatible)used in the construction of various parts are also listed for clarity.The picture of the STM is exhibited in Fig.2.For electrical insulation,two sapphire rings are glued(with Torr Seal resin sealant from Varian Inc.)on the ends of a piezoelectric scanner tube(PST1)from EBL Products Inc. (EBL3 type),which measures 13.5 mm outer diameter (OD)×12.5 mm inner diameter(ID)×38.1 mm length (L).The PST1 is then coaxially housed in,and mounted at the bottom of a protective tubular sheath(titanium made,25 mm OD).At the other end of the PST1,a stainless steel ring is glued on the sapphire ring and its tapered edge serves as the sliding edge.
A linear Z-motor of our own invention[14]is inserted into the PST1 from the top with its brim laying flat on the sliding edge by gravity.The sample(facing downward)is mounted underneath the roof of the sheath and the tip is on the shaft of the Z-motor.The lateral displacement of the PST1 can scan the tip(by scanning the whole Z-motor)as well as drive the Z-motor to move in the sliding edge plane by inertial stepping, thus implementing a 2D(X-Y)macroscopic searching motion in the sample plane.
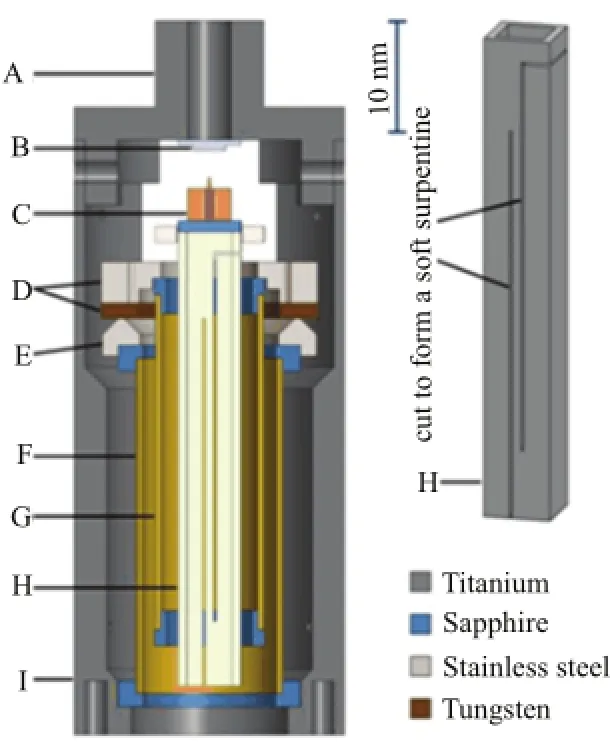
FIG.1 Cross-sectional view of the 2D searching STM.A: suspension of STM,B:sample,C:tip holder,D:Z-motor brim as the slider of the X-Y motor,E:tapered stainless steel ring used as the sliding edge,F:piezoelectric scanner tube(PST1),G:piezoelectric scanner tube(PST2)cut axially,H:square tubular shaft of the Z-motor,I:protective sheath of the STM.

FIG.2 Photo of the 2D searching STM.A:suspension of STM,B:sample,C:tip holder,D:Z-motor brim as the slider of the X-Y motor,E:tapered stainless steel ring used as the sliding edge,H:square tubular shaft of the Z-motor, I:protective sheath of the STM,J:wires,K:circuit box.
To get better and smoother sliding,the Z-motor brim is made to consist of two different metal layers that are glued together.The bottom layer is a tungsten ring of
1.4 mm thick,in which tungsten is selected because it is very hard(abrasion resistive)and can be polished to mirror finish(using 1000-grit sandpaper)for lower friction coefficient and more stable contact(with the sliding edge).The top layer is made of stainless steel because tungsten will make it too heavy and unwanted high voltage is needed for the PST1 to make it slide by inertial stick-slip.This optimized brim structure can achieve a minimum operation voltage of 4 V(room temperature, in air)using a periodic waveform of sharp pulse withround foot[15,16],which can increase to 20 V if the brim is not optimized.
By applying equal amplitude and opposite polarity (i.e.push-pull)pulse voltage signals with 4 V peak value(threshold voltage)to the opposite quadrants of the PTS1 respectively(inner electrode is grounded),the optimized inertial slider starts to generate a repeated step movement with about 80 nm step size along the corresponding direction(parallel to the sample surface). This is a fairly effective walking with the travel range being limited only by the design,which is±1 mm in X and Y directions here.The inner diameter of the upper space of the sheath and the OD of the Z-motor brim together define the range of the X-Y motion,which turns out to cover a circle of 2 mm diameter(enough to contain most of the sample information).In summary, both the 2D nanoscale positioning accuracy and large (macroscopic)scale searching ability are implemented in the STM.
Our Z-motor is a slight modification from the one described in Ref.[14],in which its capability of achieving atomic resolution is not confirmed and nor is its thermal stability discussed.Below is a re-description of the motor in Ref.[14]for completeness.It is a friction type linear motor with high simplicity and rigidity.Its driving part is simply a piezoelectric scanner tube(PST2)of 10 mm OD×9 mm ID×30 mm L(model PT130.24 from Physik Instrumente)capped with 10 mm OD×8 mm ID sapphire rings on both ends.The capped PST2 is then axially cut into almost two halves(independently controllable)with 3 mm PST2 uncut.A square tubular shaft is cut from each end to the other end with the cutting planes near the axis and parallel to each other (separated by 1 mm),forming a soft serpentine structure inside which a spring is secured to push the shaft edges outward elastically.The shaft is then inserted into the capped PST2 with its 4 edges elastically pressing(total pressing force being f1)the uncut sapphire ring(called base ring)and the two half sapphire rings (pressing forces being f2and f3,respectively). The spring position can be adjusted in the shaft to make f1≈f2≈f3.And,two driving voltages that singly deform the two halves of PST2 in one direction and recover simultaneously will move the shaft in the opposite direction,and vice versa,fulfilling the 1D Z motion for coarse approach.
Our modifications include two aspects:(i)the uncut sapphire ring is mounted in a big brim for the purpose of sliding on the sliding edge,(ii)one end of the shaft (coming out from the base ring)is cut from the side wall first before turning to axial cut(for convenient tip mounting at this end of the shaft).
III.THERMAL DRIFTS
The Z-motor itself has very low radial thermal drifts because of its near perfect axial symmetry.The shaft and PST2 are coaxial,in which PST2 is perfectly axial symmetrical since its cutting plane is through its axis. The shaft has high degree of axial symmetry except that its cut at each end is off-axial by 0.5 mm.Compared with the width(5.85 mm)of the shaft,this less than 10%asymmetry should not give rise to a remarkable radial drift.
The axial thermal drift of the Z-motor is insignificant as well,owing to its nested and rigid structure in which the shaft and PST2 are mutually clamped at the ends. A minimum of±25 V is needed to drive it,which corresponds to±1.1µm(totally 2.2µm)axial displacements of PST2[17].Thus,any thermal expansion or contraction of less than 2.2µm in the axial direction will be insufficient to cause a relative sliding between the shaft and PST2,which is roughly 14.6 K.In reality,no temperature fluctuation can be that large except that it is made on purpose.As long as the axial thermal drift of PST2 cannot move the shaft by overcoming the maximum blocking force stemming from the maximum static frictions on the shaft,it is ignorable because the tip will not drift with respect to the brim of the Z-motor.
The axial drift between the sample and tip cannot be ignored due to the unmatched thermal expansion between the sheath and PST.This drift is nevertheless greatly reduced because they are nested and their individual drifts subtract.There might be some minor tip-sample radial drift because the tip may move offcenter when searching around on the sample.Since the maximum searching area is a 2 mm diameter circle at the center,which is small compared with the 25 mm diameter of the sheath,the radial drift is inconsiderable.
IV.CONTROL AND MEASUREMENT
As shown in Fig.3,the controller(National Instruments PXI 8106RT)[16]sends low voltage push-pull signals(less than 10 V),which are buffered and then operate the X-Y motor or scan images directly without further amplification.The waveform to drive the X-Y motor is a series of periodic sharp pulses with round feet.To operate the Z-motor,two controller signals are amplified to about±60 V by a high voltage amplifier (Physik Instrumente E-463 HVPZT Amplifier).The tunneling current data are also collected by the samecontroller after being amplified and converted to voltage signal by the home-built preamplifier(see detail in Ref.[18]).
The coarse approach is done digitally:the controller drives the shaft of the Z-motor to approach the sample at a rate of 0.5 V/s(corresponding to an approaching speed of about 30 nm/s)and measures the tunneling current at 5000 Hz.This ensures that the tip moves approximately only 0.06˚A between two adjacent current measurements,which is needed to avoid tip crashing since one˚A tip-sample distance change will cause a tunneling current change by an order of magnitude. Once the measured tunneling current is large enough, the coarse approach is stopped.

FIG.4 Raw-data HOPG images of(a)1.14 nm×1.11 nm and(b)1.64 nm×1.63 nm taken in air at room temperature under constant height mode with+100 mV sample bias voltage.
V.PERFORMANCE
To check how this STM performs,we put the STM in the same home-built sound-isolated box as mentioned in Ref.[17]and use it to image highly oriented pyrolytic graphite(HOPG,GYBS/1.7,type ZYB from NT-MDT)at room temperature in air.The tip is a mechanically cut Pt90/Ir10 wire(diameter 0.15 mm from Goodfellow).The raw data images of different sizes taken under constant height scan mode are shown in Fig.4 with the measurement conditions being 100 mV bias voltage(sample positive)and 8.3 Hz scan rate. The hexagonal lattice of HOPG looks very clear and unskewed.There are some noises at the boundaries of atomic features,which are believed due to the imperfectness of the tip[14].In short,this STM performs well.
VI.CONCLUSION
We present a new design of a 2D macroscopic sample area searchable STM with atomic precision searching capability and high degree of symmetry.It is a solution to the 1D searchable STM proposed in Ref.[14]. The thermal drifts of this STM are also discussed and its atomic resolution capabilities are also confirmed via the raw data images of HOPG sample taken in ambient conditions.Although only STM images are shown, we believe that the structure should also work well for other scanning probe microscope types such as atomic force microscope,etc.Especially,its rigidity and low drifts should make it useful in studying biological and electrochemical samples where long time stability and high resistance to vibrations are needed to trace a single atom or nano-target in harsh ambient conditions.
VII.ACKNOWLEDGMENTS
This work was supported by the National NaturalScienceFoundation ofChina (No.U1232210, No.11374278,No.21505139,and No.11204306),the Project of Chinese National High Magnetic Field Facilities(No.Y46CLB1191B2),the Major Program of Development Foundation of Hefei Center for Physic Science and Technology(No.2014FXZY002),and the Scientific Research Grant of Hefei Science Center of Chinese Academy of Science,and Ministry of Science and Technology of China(No.2016YFA0401003).
[1]G.Binnig,H.Rohrer,C.Gerber,and E.Weibel,Phys. Rev.Lett.50,120(1983).
[2]J.A.Kubby and J.J.Boland,Surf.Sci.Rep.26,61 (1996).
[3]U.Diebold,Surf.Sci.Rep.48,53(2003).
[4]F.Endres and S.Z.E.Abedin,Phys.Chem.Chem. Phys.8,2101(2006).
[5]J.W.G.Wild¨oer,A.J.A.van Roy,H.van Kempen, and C.J.P.M.Harmans,Rev.Sci.Instrum.65,2849 (1994).
[6]B.J.Albers,M.Liebmann,T.C.Schwendemann,M. Z.Baykara,M.Heyde,M.Salmeron,E.I.Altman,and U.D.Schwarz,Rev.Sci.Instrum.79,033704(2008).
[7]G.Blatter,M.V.Feigel’man,V.B.Geshkenbein,A.I. Larkin,and V.M.Vinokur,Rev.Mod.Phys.66,1125 (1994).
[8]T.S.Nunner,W.Chen,B.M.Andersen,A.Melikyan, and P.J.Hirschfeld,Phys.Rev.B 73,104511(2006).
[9]Z.G.Xia,J.H.Wang,Y.B.Hou,and Q.Y.Lu,Chin. J.Chem.Phys.28,70(2015).
[10]K.Itaya,Electrochemistry 83,670(2015).
[11]L.Tang,X.Q.Li,R.C.Cammarata,C.Friesen,and K.Sieradzki,J.Am.Chem.Soc.132,11722(2010).
[12]T.Albrecht,W.W.Li,W.Haehnel,P.Hildebrandt, and J.Ulstrup,Bioelectrochemistry 69,193(2006).
[13]Z.Q.Pang,J.H.Wang,and Q.Y.Lu,Meas.Sci.Technol.20,065503(2009).
[14]Q.Wang and Q.Y.Lu,Rev.Sci.Instrum.80,085104 (2009).
[15]C.Renner,P.Niedermann,A.D.Kent,and Ø.Fischer, Rev.Sci.Instrum.61,965(1990).
[16]Y.B.Hou,J.H.Wang,and Q.Y.Lu,Rev.Sci.Instrum. 79,113707(2008).
[17]Datasheet of PT130.24,Physik Instrumente.
[18]Q.F.Li,Q.Wang,Y.B.Hou,and Q.Y.Lu,Rev.Sci. Instrum.83,043706(2012).
(Dated:Received on March 6,2016;Accepted on April 28,2016)
 CHINESE JOURNAL OF CHEMICAL PHYSICS2016年5期
CHINESE JOURNAL OF CHEMICAL PHYSICS2016年5期
- CHINESE JOURNAL OF CHEMICAL PHYSICS的其它文章
- Hydrodeoxygenation of Anisole over Ni/α-Al2O3Catalyst
- Surface Chemistry of Ga(CH3)3on Pd(111)and Effect of Pre-covered H and O
- Photo-depositing Ru and RuO2on Anatase TiO2Nanosheets as Co-catalysts for Photocatalytic O2Evolution from Water Oxidation
- Efficient Removal Phenol Red over Ternary Heterostructured Ag-Bi2MoO6/BiPO4Composite Photocatalyst
- Highly Efficient and Selective Removal of Pb(II)ions by Sulfur-Containing Calcium Phosphate Nanoparticles
- Combination Computing of Support Vector Machine,Support Vector Regression and Molecular Docking for Potential Cytochrome P450 1A2 Inhibitors