
摆线针轮传动与小型RV减速器的研究
2016-11-19 18:21何荣军朱兆华毕云清
科技创新与应用 2016年4期
关键词:齿轮
何荣军 朱兆华 毕云清

摘 要:摆线针轮减速器与RV传动在诸多的齿轮减速器中占据着非常重要的地位,其具有很多的优点,比如体积比较小,精度能够达到很高的标准,传动比很高,同时其整体的刚度也是比较高的,正是由于这些优点,这种减速器就广泛的应用于工业以及生活领域中。
关键词:摆线针轮传动;小型RV减速器;齿轮
1 少齿差行星减速器的发展概况
行星传动的运作方式是将定轴的传动改变为动轴的传动,这就采用了功率分流的原理,同时非常合理的应用了内啮合以及采用比较合理的均载装置等,所以通过这样的合理方式使得行星传动具有了很多的优点,主要表现为整体的体积比较小,整体的机构比较紧凑、重量比较轻、传动范围广,同时整体的效率也是比较高的,综合上述的特点,行星传动的技术应用非常的广泛。
少齿差行星传动具有很独特的优势,其传动方式比较特殊,它的工作通过一个行星外齿轮和一个内齿轮组成一对内啮合齿轮副,其结构有独特的地方,与其他的传动机构具有很多不同的特点,其外齿轮的齿数差非常小。在当前的技术水平下,已经研制出很多种形式的少齿差行星传动装置。在这之后,人们又找到了新的突破口,大胆的设想出将外齿轮制成能够变形的柔性构件,同时还能够使得它的圆心与内齿轮的圆心保证重合,通过这种大胆的设想,就发明了谐波齿轮的传动。在此之后,人们在摆线的基础之上,逐渐的结合渐开线行星齿轮传动的技术,又发明了一种新的传动方式——RV传动。正是这些有益的特点以及相对较低的工作成本,其被广泛的应用于工业领域。
2 摆线针轮传动的基础
少齿差行星传动是由一对齿数相差比较少的内啮合齿轮以及输出机构组成的一种行星齿轮传动。这种传动的齿轮齿数一般为1~4。但是摆线针轮行星传动则是非常典型的K-H-V型的一齿差行星传动。K表示的是中心轮,即太阳轮,H表示的是系杆,有被称为行星架,V表示的是能够传递两平行轴回转运动的等角速度速比的输出机构,它进行输出的是行星轮的绝对运动,但并不是中心轮或者系杆的绝对运动。当少齿差行星轮系传功应用于减速传动的时候,以系杆H为主要载体,系杆通常是做成偏心的一个轴,K-H-V型的少齿差行星传动机构具有传动比比较大、重量比较轻、体积比较小以及传动效率较高的优点。
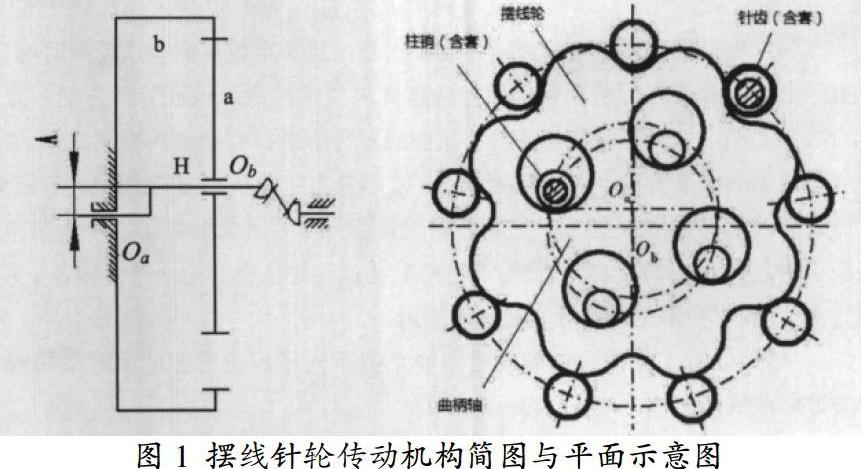
图1即为摆线针轮行星传动机构的简图与平面的示意图。其中H为输入轴,其具有偏心距A的偏心转臂,所以又将其称为曲柄轴。图中a是摆线齿轮,简称为摆线轮,整个齿形为短幅的外摆线的等距的曲线,根据运动的基本要求,只是使用一个摆线轮就可以实现传动,但是为了达到更高的运作能力,就采用了两个完全相同的奇数齿的摆线轮,同时分别装在双偏心轴上两轮位置相差180°。b是一个针轮,其整体的齿形是圆柱形的针齿,这是为了减少一定的摩擦,通常情况下是为了达到针齿销可以转动的目的,需要加上一个针齿套。
a安装在偏心距为A的输入轴H上,在输入轴H进行旋转的时候,摆线不仅会绕其安装在H上的轴线转动,同时还会随着H一起绕着比较固定的轴线Oh转动,也就是摆线轮a的轴线Oa在半径等于偏心距A的一个圆周上运动。由此就可以得到,摆线轮a同时具有公转以及自转,所以在行星轮系中,将其称作是行星轮,将相对固定的与轴线Oh回转的针轮b称作是中心轮或者是太阳轮。
这种机构在实际的使用过程当中,一般情况下是将针轮进行合理的固定,使得摆线轮能够在固定针轮的作用之下反向的旋转。此时传动的整体减速比就变为-Za,Za就是擺线轮的齿数,负号表示的是输入与输出的方向是相反的。
3 小型RV减速器
RV减速器具有很多的优点,首先,小型的RV减速器整体传动比范围大,RV传动在对于摆线针轮行星传动的基本原理上,又根据实际的工作情况成功的串联上一级的行星传动,对第一级别减速装置中齿轮的齿数Z1,Z2,通过这样的改进和创新,就能够很方便的获得范围比较大的传动比,对于RV的减速器,其传动比的通常范围为i=57~192。RV减速器的传动比刚度比较大,对于RV传动的减速器,其第二级摆线针轮传动实现了多齿的啮合,通过这种多齿的啮合,就很大程度上提高了齿轮之间的啮合刚度。同时,机构的输出采用的是两端支撑的尽可能大的刚性的圆盘输出结构,这种小改进能够比一般的摆线减速器的输出机构具有更加大的刚性,而且其抗冲击性能也具有非常大的提高和改进。如图2,为RV减速器的传动运动简图。
型RV减速器的传动精度比较高,回差比较小,只需要设计的合理一些,就能够获得很理想的传动精度以及小的回差,同时能够保证平稳的运转。同时,这种减速器具有很高的传动效率,除了第一级的齿轮啮合之外,其他的每一处都基本实现了全滚动的啮合,这种现状就会在很大的程度上减小不必要的磨损,整个的传动效率就很高。RV减速器的承载能力比较强,同时整体的结构还比较紧凑,第一级利用了很多的行星轮,这样就能够提高整体的承载能力,尤其是第二级,摆线针轮为硬面的多齿的啮合,具有这种结构使得RV传动具有小体积传递大转矩。在进行RV整体设计中,通过对传动机构置于行星架的支承主轴承内,通过这种设计能够大大的缩小径向的整体尺寸,但是,由于摆线轮以及曲柄等均需要比较专门的加工设备,同时对于整体的装配精度以及制造精度具有很高的要求,最终会造成很高的成本。
参考文献
[1]韩林山,董运福,黎浩.基于SolidWorks的2K-V型减速器摆线轮的三维参数化设计[J].矿山机械,2012,2:106-109.
[2]赵海鸣,王猛,杨宏波,等.RV减速器基于装配条件的配齿方法研究[J].机械传动,2014,12:5-9+14.
[3]冉毅,杜雪松,孙章栋,等.RV减速器的摆线针轮副接触分析[J].新型工业化,2014,11:31-36.
猜你喜欢
少儿科学周刊·儿童版(2020年9期)2020-11-25
少儿科学周刊·儿童版(2020年9期)2020-11-25
少儿科学周刊·儿童版(2020年9期)2020-11-25
数学大王·中高年级(2020年8期)2020-08-14
少儿科学周刊·少年版(2020年9期)2020-03-04
少儿科学周刊·少年版(2020年9期)2020-03-04
疯狂英语·读写版(2019年5期)2019-09-10
农家科技(2018年8期)2018-10-15
湖南大学学报·自然科学版(2014年3期)2014-12-30
中国机械(2014年24期)2014-10-21
