电子助力转向系统构造探究
2016-11-19 06:34:53张乐张鹤
工业技术创新 2016年5期
张乐,张鹤
电子助力转向系统构造探究
张乐,张鹤
(上汽通用五菱汽车股份有限公司,广西柳州,545007)
转向系统作为汽车构造中的一大重要基础,其功能、处理能力直接影响到整车综合性能。针对当前转向系统发展的最高阶段——电子助力转向系统(EPS),从其分类、结构、工作原理几大方面进行了论述。结合系统设计上的特点,分析了其优势。研究表明:该系统具有广阔发展和应用前景,将得到更多汽车公司的青睐。
转向系统;电子助力转向系统;汽车;传感器;可变助力;主动回正;环境友好
引言
人们在选购汽车时往往犹为关注直接影响汽车性能的核心“三大件”——发动机、底盘及变速箱。其中底盘可细分为传动系统、行驶系统、转向系统和制动系统四部分,其中转向系统作为整车构造中最为重要的系统之一,一直是汽车行业的研究重点。转向系统的好坏直接影响到汽车的舒适性、安全性、能耗,以及环境友好性。
汽车转向系统的发展经历了纯机械式转向系统、液压助力转向系统、电子助力转向系统三大基本阶段[1-3];下一步的发展趋势为线控助力转向系统[4]。图1所示为汽车转向系统发展流程图。1988年,日本铃木汽车公司首先在旗下生产的小型轿车上配备了电子助力转向系统。该系统采用电能取代传统液压能,与汽车发展中的环保、节能、安全三大主题相吻合,具有广阔发展和应用前景[5]。
1 电子助力转向系统分类
根据电子助力转向系统中电动机布置位置的差异,可以将其大致分为转向管柱电子助力转向系统和齿轮齿条电子助力转向系统两类,其中后者又可分为单小齿轮型、双小齿轮型和齿条型三种)。图2所示为电子助力转向系统分类图。
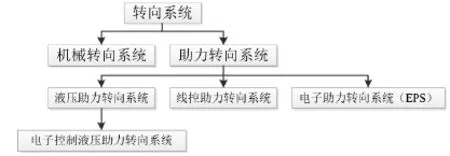
图1 汽车转向系统发展流程图
1.1转向管柱型(CEPS)
转向管柱型电子助力转向系统的控制器、助力单元及传感器都集中在转向管柱上。此系统结构简单、布置灵活、紧凑性较好且易于安装,可安装于不同形式的转向柱,如倾斜式转向柱和固定式转向柱等。

图2 电子助力转向系统分类图
1.2齿轮齿条型(PEPS/REPS)
齿轮型助力单元固定在转向齿轮的小齿轮轴上端。由于助力单元在驾驶室之外,因此具有高转向助力、噪声小的特点。齿条型助力单元可灵活固定在转向齿轮的齿条各处,因此方便整车布置,同时降低了转动惯量,提供优良的转向特性。
2 电子助力转向系统结构
电子助力转向系统主要由控制模块(ECU)、转向柱管、电动机、扭矩传感器、汽车速度传感器等部件组成,如图3所示。本文主要介绍转向管柱型电子助力转向系统(CEPS)的组成结构,如图4所示。

图3 EPS结构示意图

图4 CEPS结构示意图
2.1EPS位置传感器
ECU作为整个EPS系统的核心是当之无愧的,但是触发ECU工作的初始信号来源于位置传感器。 EPS位置传感器主要分为3种:相对位置传感器、绝对位置传感器、无位置(马达位置)传感器。其中后者不直接检测转子位置,而是通过测量电机的磁链、电流电压等物理量,并进行相应的处理而得出。
2.1.1相对位置传感器
相对位置传感器(如图5所示)需要进行中位标定,确定±180°内的中心位置。其在市场上的五菱宏光及五菱荣光等系列车型中均具有如下特点:1. 具有相对位置传感器探头(P1/P2);2. 具有两个90度方位的霍尔传感器;3. 中位标定实现方向盘中位;4. 利用学习算法计算整车实际中位。

图5 相对位置传感器示意图
2.1.2绝对位置传感器
绝对位置传感器(如图6所示)需要进行中位标定,确定绝对的中心位置。绝对位置信号在Key-on状态时出现,通过CAN网络传输到总线上。控制器具有齿轮位置和磁环位置比较,以及位置信号误差计算等诊断功能。

图6 绝对位置传感器示意图
2.2中位
2.1.1整车中位
整车中位,简单来讲就是车辆在符合制造技术要求后,在方向盘居中的情况下,转向管柱相对于转向机齿条的位置。
2.1.2EPS中位
EPS本身自定义一中心位置,一旦该位置确定后,EPS便围绕其提供相应回正力。因此,整车中位与EPS中位需要有一个绝对位置。如果两者不统一,即在整车中位情况下未达到EPS中位,那么EPS会继续产生一个回正力,影响方向盘回正性、左右手力对称性等。因此,EPS中位标定是用来确认方向盘中位的。
2.3转向管柱
转向管柱连接方向盘及转向中间轴(间接连接转向机),控制器、马达、助力器等零部件也安装在转向管柱上,设计转向管柱时要考虑到内溃缩行程设置(溃缩的形成一般取决于整车布置)、连接车身固定支架位置设计,如图7所示。
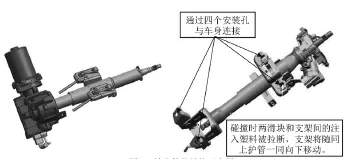
图7 转向管柱结构示意图
3 电子助力转向系统工作原理
当汽车转向时,传感器会探测到方向盘的力矩和拟转动的方向,该信号传递至ECU,ECU会根据转动力矩、方向等数据向电机发出动作指令,产生助力转向,如图8所示。

图8 电子助力转向系统工作原理图
3.1EPS控制器
控制器基于DSP芯片的控制技术,根据各输入信号控制电机产生适当助力大小及方向,主要可实现助力功能、回正功能和阻尼功能等,如图9所示。
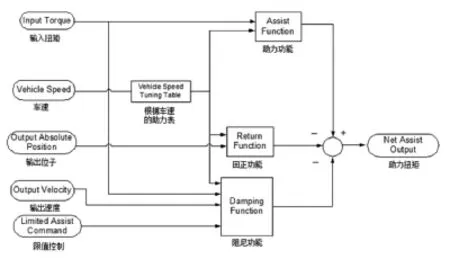
图9 控制器工作流程图
3.2EPS力矩传感器
输入轴的转动引起磁感应强度的变化,霍尔探头通过探头T1和探头T2感应磁感变化,以计算驾驶员输入力矩的值,如图10所示。
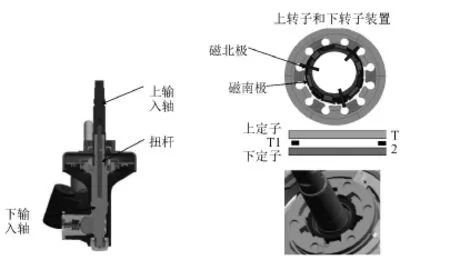
图10 力矩传感器结构示意图
在数字式力矩传感器中,霍尔传感器采集到的模拟信号经过A/D转换输出得到数字信号,可以直接供给DSP芯片使用,具有更好的灵敏度和精确性,如图11所示。

图11 信号处理流程图
4 电子助力转向系统优势
汽车电子助力转向系统作为一种新型的汽车动力转向系统,能够提高主动安全性、节约燃料(降低3%~5%的油耗)、有利于环保(减少约3.5%的CO2排放量),是一项紧扣现代汽车发展主题——“安全、节能、环保”的高新技术[6]。本章集中讨论电子助力转向系统相比其他转向系统的优势。
4.1降低油耗
液压助力转向系统是以发动机的动力作为转向能源,带动转向泵进行工作。不管是否转向,发动机动力一直被消耗。电子助力转向系统由电能取代了传统液压能,转向时由电机提供助力,因此在不转向时,可以降低油耗2.5%;在转向时,可以降低油耗5.5%。
4.2转向轻便、高速稳定、回正性能好
使用液压助力转向系统的车辆依靠液压传递助力,转向沉重,从而无法兼顾到车辆在高速时的转向稳定性和低速时的转向轻便性。电子助力转向系统可以通过软件来调整转向所需助力的大小,在低速时转向轻便,高速时稳定性好。该系统可以在不同的行驶路况下提供所需的最佳助力,减少了由路面不平产生的干扰,提高了车辆行驶的稳定性和回正性。除此之外,电子助力转向系统还可以实现倒车轨迹模拟、自动泊车、车道保持、牵引力补偿等功能。
4.3节约装配时间
电子助力转向系统依靠电机,通过减速机构来驱动转向机构,具有零件数量少、可靠性强、结构简单紧凑及布置灵活等特点,一般可以减少整车厂4~7分钟的装配时间,进而提升整车厂生产效率。
4.4缩短开发周期
由于电子助力转向系统可以通过软件来调整转向助力大小和程序,因此可以令一种电子助力转向系统与多个车型共用,降低了整车制造成本,也缩短了开发及生产周期。
5 结束语
电子助力转向系统结构简单、零件数少、可靠性强,解决了长期存在的液压管路渗漏和效率低下等问题。该系统具有可变助力,能够主动回正、增加阻尼、提高燃油经济性,并可实现自动泊车、倒车轨迹和车道保持等。电子助力转向系统可以节约装配时间、布置灵活、调试简单、节能环保,得到了越来越多汽车公司的青睐。
[1]黄安华, 卜宪卫. 浅谈汽车的转向系统[J]. 农业装备与车辆工程, 2010, 2010(1): 7-10.
[2]陈奎元, 马小平, 季学武. 电动助力转向系统控制技术的研究[J]. 江苏大学学报: 自然科学版, 2004, 25(1): 21-24.
[3]朱华. 汽车电动助力转向系统研究现状及趋势[J]. 汽车与配件, 2010(1): 34-36.
[4]王常友, 董爱杰. 汽车转向系统的现状及发展趋势[J]. 北京汽车, 2007(3): 7-10.
[5]李武波. 电动助力转向系统的控制及试验研究[D]. 广州: 华南理工大学, 2011.
[6]程源. 汽车电动助力转向系统的动力学分析与控制策略研究[D]. 太原: 中北大学, 2011.
A Comprehensive Investigation on Electrical Power Steering System
ZHANG Le, ZHANG He
(SAIC GM Wuling Automobile Co., Ltd., Liuzhou, Guangxi, 545007, China)
Steering system, as an essential part of automobile structure, its performance directly affects overall properties of a complete automobile. Current stratosphere of steering system, i.e. electrical power steering system (EPS), for comprehensive discussion on its classification, structure and mechanism are focused on. Also, its advantages are analyzed based on above design characteristics, fully implementing a broad prospect for development and application of such a system. It is believed that electrical power steering system will receive favors from more and more automobile companies.
Steering System; Electrical Power Steering System; Automobile; Sensor; Variable Power Assist; Active Return; Eco-friendly
U463.4
A
2095-8412 (2016) 05-1043-04工业技术创新 URL: http://www.china-iti.com
10.14103/j.issn.2095-8412.2016.05.059
张乐(1987-),男,本科,陕西西安人,现工作于上汽通用五菱汽车股份有限公司,主要从事汽车零部件质量问题分析方面的工作。
E-mail: 312989896@qq.com
猜你喜欢
时代英语·高三(2022年3期)2022-11-10 01:20:51
汽车实用技术(2022年15期)2022-08-19 02:48:08
云南化工(2021年8期)2021-12-21 06:37:46
大电机技术(2021年3期)2021-07-16 05:38:34
中国煤层气(2021年5期)2021-03-02 05:53:14
中外文摘(2020年13期)2020-08-01 01:07:06
时代英语·高三(2019年4期)2019-09-03 02:11:40
中国特种设备安全(2019年1期)2019-03-13 01:05:36
西南石油大学学报(自然科学版)(2015年5期)2015-04-16 05:12:30
噪声与振动控制(2015年4期)2015-01-01 07:08:09