
自动扶梯空载下行制停距离范围分析
2016-11-18 11:50:31吴常坤
中国特种设备安全 2016年10期
吴常坤
(江苏省特种设备安全监督检验研究院无锡分院 无锡 214000)
自动扶梯空载下行制停距离范围分析
吴常坤
(江苏省特种设备安全监督检验研究院无锡分院 无锡 214000)
本文针对自动扶梯维护保养和定期检验工作中无法根据空载下行制停距离判断有载下行制停距离是否符合要求的问题,通过分析制停过程中制动力与制动距离的关系,推理出空载和有载工况下行制停距离之间的关系,并据此计算出能够覆盖有载下行制停距离范围要求的空载下行制停距离范围。此范围在有载工况下依然具有约束效用,相比国标中规定的空载下行制停距离范围更具参考意义。通过实例计算验证了此范围在实际中应用的可行性。
自动扶梯 制动力 空载下行制停距离 有载下行制停距离
随着自动扶梯在地铁、商场等公共场所的广泛应用,由自动扶梯制停距离过大造成的安全事故时有发生。自动扶梯的制动性能在其安全运行中的作用不容忽视。根据GB 16899—2011《自动扶梯和自动人行道制造与安装安全规范》的规定,空载和有载向下运行自动扶梯的制停距离应符合表1的规定[1]。
由于自动扶梯在进行定期检验时只测量其空载下行制停距离[2],而一台自动扶梯在受载情况下的下行制停距离会大于其空载下行制停距离,因此,即使自动扶梯的空载下行制停距离符合表1的规定,有载下行制停距离也未必符合。为保证自动扶梯在运送乘客时制停距离符合要求,仅验证空载下行制停距离是不够的。而在条件受限的情况下,自动扶梯通常在安装监检之后的维护保养和定期检验工作当中就不再测量有载下行制停距离,故而如何确定空载和有载下行制停距离之间的关系,使得有载下行制停距离范围要求能够体现在空载下行制停距离范围里就显得尤为关键。
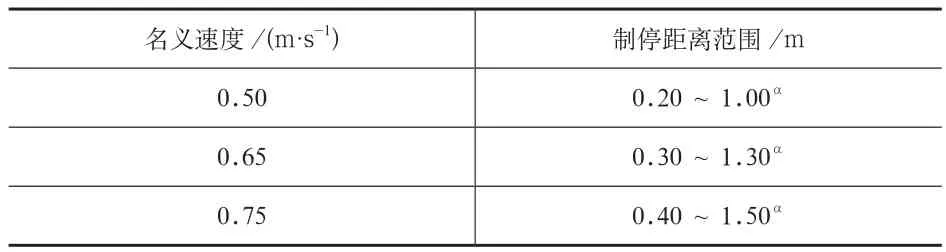
表 1 GB 16899—2011中自动扶梯的下行制停距离范围
1 空载、有载下行制停距离关系分析
自动扶梯通过驱动主机带动链条、梯级和扶手装置循环运行,在动力电源或控制电源失电时,依靠驱动主机上的工作制动器使自动扶梯制停[3]。本文从能量守恒角度来分析制停距离与制动力之间的关系。
在理想状况下,自动扶梯下行制停过程中,其自身的动能和重力势能损失与负载的动能和重力势能损失之和,应与制动器提供的制动力做功相等。不过考虑到自动扶梯的机械效率,则有:

式中:
W空—— 空载下行制停过程中制动力做功;
W载—— 有载下行制停过程中制动力做功;
Ek空—— 空载下行制停过程中动能损失总和;
Ek载—— 有载下行制停过程中动能损失总和;
Ep空—— 空载下行制停过程中势能损失总和;
Ep载—— 有载下行制停过程中势能损失总和;
η —— 机械效率。
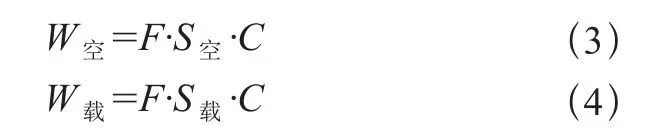
自动扶梯空载、有载下行制停过程中制动力做功分别为:
式中:
F —— 工作制动器提供的制动力;
S空—— 空载下行制停距离;
S载—— 有载下行制停距离;
C —— 制动力作用距离与制停距离之比。在不考虑打滑、结构变形的情况下,无论自动扶梯的制动器采用何种型式,C都是与自动扶梯自身构造有关的一个常数。

自动扶梯运行过程中自身动能,即自动扶梯空载运行动能:由于自动扶梯部件的质量和转动惯量是确定的,因此,在自动扶梯运行速度不变的情况下,直线运动部件和旋转运动部件动能皆为常数,也即Ek空为一个常数。
自动扶梯有载运行时的动能除了包含自动扶梯自身动能外,还应包括制动载荷的动能,因此:

式中:
v —— 自动扶梯运行速度;
m载—— 自动扶梯制动载荷。
根据GB 16899—2011,自动扶梯制动载荷的确定见表2。受载的梯级数量由提升高度除以最大可见梯级踢板高度求得。
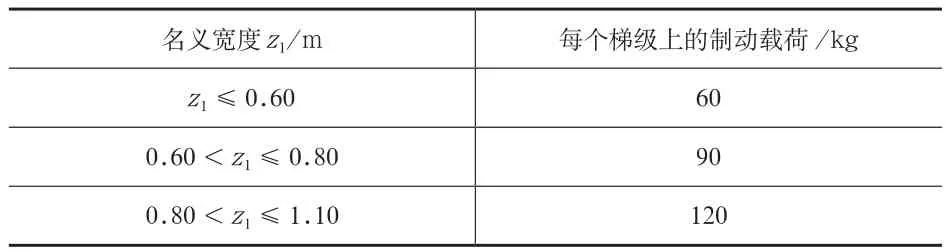
表2 自动扶梯制动载荷的确定
由于自动扶梯是循环运行的,自动扶梯在运行时自身的重力势能不发生改变,因此空载下行制停过程中势能损失Ep空为0。自动扶梯加入制动载荷后,自动扶梯下行制停过程中的重力势能损失:

式中:
场所依恋和偏好与自我恢复感知的关系如表4所示。可以看出,场所依恋和偏好与自我恢复感知均表现出显著的相关性,说明场所依恋和偏好对自我恢复力感知有显著的影响,这与以往研究的结论是相同的[26-27],同时,也进一步说明了自我恢复量表的有效性。
g —— 重力加速度;
α —— 自动扶梯倾角。
根据上述公式推导可得:
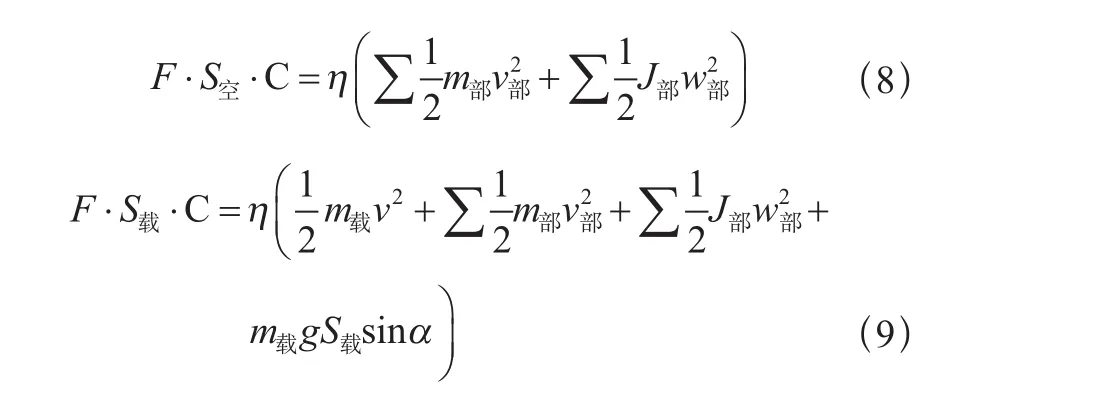
式(5)中,为自动扶梯中做直线运动部件的动能总和,直线运动部件包括部分梯级、链条、扶手带等;为自动扶梯中做旋转运动部件的动能总和,旋转运动部件包括部分梯级、链条、扶手带以及驱动轮、传动轮、驱动轴、传动轴、制动轮等。
式(8)、式(9)即为制动力与制停距离关系公式。两式相比可得:
由于空载动能Ek空大于0,因此根据式(10)易知S载>S空。式(10)中,制动载荷m载、运行速度v 、自动扶梯倾角α、空载运行动能Ek空皆为不随自动扶梯使用时间增长而改变的常数,仅有制停距离在受到制动器磨损、调整等情况的影响下会发生改变,因此可知,有载下行制停距离S载与空载下行制停距离S空有着确定性关系。不过由于Ek空和自动扶梯的运行部件有关,无法直接计算得知,因此在自动扶梯监督检验时,需测量有载下行制停距离和空载下行制停距离,分别以S载0、S空0来表示,用以计算Ek空值。在之后维护保养和定期检验时测得的空载下行制停距离以S空1来表示,S空1所对应的有载下行制停距离以S载1来表示。分别代入式(10)可得:

式中:
式(12)、式(13)即有载下行制停距离与空载下行制停距离的关系公式。据此可知,只需在监督检验时测量并记录下S载0、S空0的值,便能够在定期检验时,根据测量的空载下行制停距离S空1来推算有载下行制停距离S载1。
2 定期检验时空载下行制停距离范围确定
由于有载下行制停距离和空载下行制停距离有确定的对应关系,因此有载下行制停距离的范围可以用空载下行制停距离的范围来表示。
有载下行制停距离S载1对空载下行制停距离S空1求导可得:
由式(14)易知f′(S空1)大于0,故而f(S空1)为增函数,其反函数 f-1(S空1)亦为增函数,S载1随着S空1增大而增大,S载1取最大值或最小值时S空1也相应取最大值和最小值。为方便表达,令自动扶梯的下行制停距离范围为[a,b),a和b的值参照表1。若要自动扶梯的空载下行制停距离同时符合GB 16899—2011中空、有载下行制停距离范围要求,需同时满足条件:

由S载1和S空1的关系公式可知:

式(15)等价于:

由于有载下行制停距离S载1大于空载下行制停距离S空1,即S载1>S空1=f-1(S载1),因此式(15)也等价于:

因此,只要空载下行制停距离S空1的范围取[a,f-1(b)),便可同时满足GB 16899—2011中空、有载下行制停距离范围的要求。对表1进行计算可得出同时考虑有载和空载工况的自动扶梯空载下行制停距离的范围,见表3。
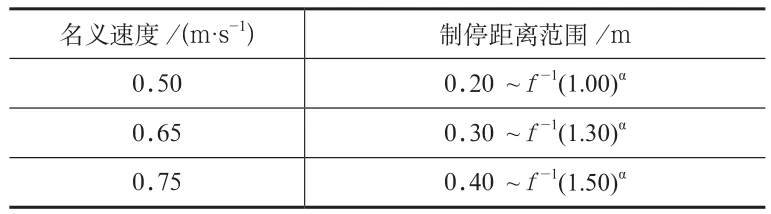
表 3 覆盖有载工况的自动扶梯空载下行制停距离范围
在自动扶梯监督检验时,只要测量出空载、有载下行制停距离,就能计算出覆盖有载工况的空载下行制停距离的范围。如果在维护保养和定期检验时测得空载下行制停距离超出此范围,可以通过调整制动力使其符合此范围要求,而在条件允许的情况下,可以通过测量有载下行制停距离验证其是否符合有载下行制停距离范围要求。
3 实例分析

Analysis of No-load Downward Stopping Distance Range of the Escalator
Wu Changkun
(Jiangsu Province Special Equipment Safety Supervision Inspection Institute·Branch of Wuxi Wuxi 214000)
It's unable to determine whether on-load downward stopping distance meet the requirements when only no-load downward stopping distance is measured in the escalator maintenance and periodic inspection. This paper analyzes the relationship between braking force and stopping distance and infers the relationship of downward stopping distance between the no-load and on-load conditions. The no-load downward stopping distance range which can cover the range of on-load downward stopping distance is calculated. The calculated range has more reference value than the range of the national standard. The feasibility is verifed by an instance.
Escalator Braking force No-load downward stopping distance On-load downward stopping distance
X941
B
1673-257X(2016)10-0027-03
10.3969/j.issn.1673-257X.2016.10.006
吴常坤(1986~),男,硕士,工程师,从事电梯检验技术研究、电梯物联网技术研究工作。
2015-12-28)
猜你喜欢
金桥(2022年4期)2022-05-05 06:09:50
中国特种设备安全(2021年5期)2021-11-06 05:09:20
中国特种设备安全(2021年1期)2021-07-21 08:56:34
中国特种设备安全(2019年11期)2020-01-16 08:06:02
中国特种设备安全(2019年3期)2019-04-22 05:05:32
中国特种设备安全(2019年3期)2019-04-22 05:05:16
小学生必读(中年级版)(2019年6期)2019-01-11 09:17:14
中国特种设备安全(2018年10期)2018-12-18 02:17:08
人大建设(2018年7期)2018-09-19 06:18:58
商周刊(2018年15期)2018-07-27 01:41:16
