
从DARPA研究计划看海战场预警探测系统发展
2016-11-16 08:31叶显武
现代雷达 2016年10期
叶显武
(海军驻南京地区电子设备军事代表室,南京 210039)
从DARPA研究计划看海战场预警探测系统发展
叶显武
(海军驻南京地区电子设备军事代表室,南京 210039)
制海权是军事强国现代战争竞争的焦点,文中介绍了DARPA“跨域对海监视与瞄准”、“战术侦查节点”、“九头蛇无人潜水母舰”、“预置式上浮载荷”、“分布式敏捷猎潜”等海战场作战样式研究计划,描述了“反潜持续追踪无人艇”、“竞争环境下目标识别与适应”、“量子传感器”、认知雷达等支撑海战场作战的装备和技术研究项目,从系统功能构成、协同探测维度和智能化三个方面展望了未来海战场预警探测系统发展方向。
DARPA;海战场;协同;无人;智能
0 引 言
2014年,美军针对中国日益发展的反介入/区域拒止能力,提出“第三次抵消”战略,试图借助定向能武器、无人系统、人工智能、高超声速打击武器和增材制造等技术,抵消中国日益发展的反介入/区域拒止能力。在此背景下,DARPA于2015年3月发布《服务于国家安全的突破性技术》战略规划,强调确保空、海、陆、天、电磁、网络等六个领域的作战能力,通过构建复杂军用系统,以颠覆性的创新技术维持军事优势[1]。
作为美国国防科研核心机构与全球国防预研创新标杆,DARPA致力于高风险、高回报的突破性、颠覆性创新,涉及新样式、新体系、新系统、新原理、新概念、新材料、新工艺等各个领域,是研发机构与军事用户、基础研究与应用研究、远期计划与近期应用之间的桥梁,被称为美国国防部转型的技术引擎。在预警探测领域,DARPA的研发能力齐全,涵盖体系架构、系统集成、器件开发、基础理论等各个层次,雷达、光学、水声等预警探测系统新体制、新概念、新技术层出不穷,呈现顶层规划牵引、基础技术支撑的良性创新循环。本文介绍了DARPA近期与海战场相关的研究计划,并展望了海战场预警探测装备的未来发展。
1 DARPA海战场作战样式研究计划
1.1 “跨域对海监视与瞄准(CDMaST)”
2015年10月,DARPA发起CDMaST计划[2],旨在论证在高对抗环境下,利用水下、海上、空中等有人、无人系统的雷达、光电、水声探测装备,构建广域、跨域、分布式对海监视瞄准体系架构。该体系的典型特征是将现有的反潜、反舰作战中的探测、识别、定位、跟踪、打击、评估等作战要素分解到广泛分布的多种多样的无人艇、无人舰、无人机等低成本、协同作战、无人化作战平台,迫使对手投入更多资源开展体系对抗,将目前集中式航母编队反舰、反潜模式,如图1所示,转变为在1 000 000 km2海域范围内的分布式、灵活打击样式。CDMaST将把无人作战、分布式蜂群、第三方制导、跨域协同从体系上推进到一个新的层次,如图2所示。
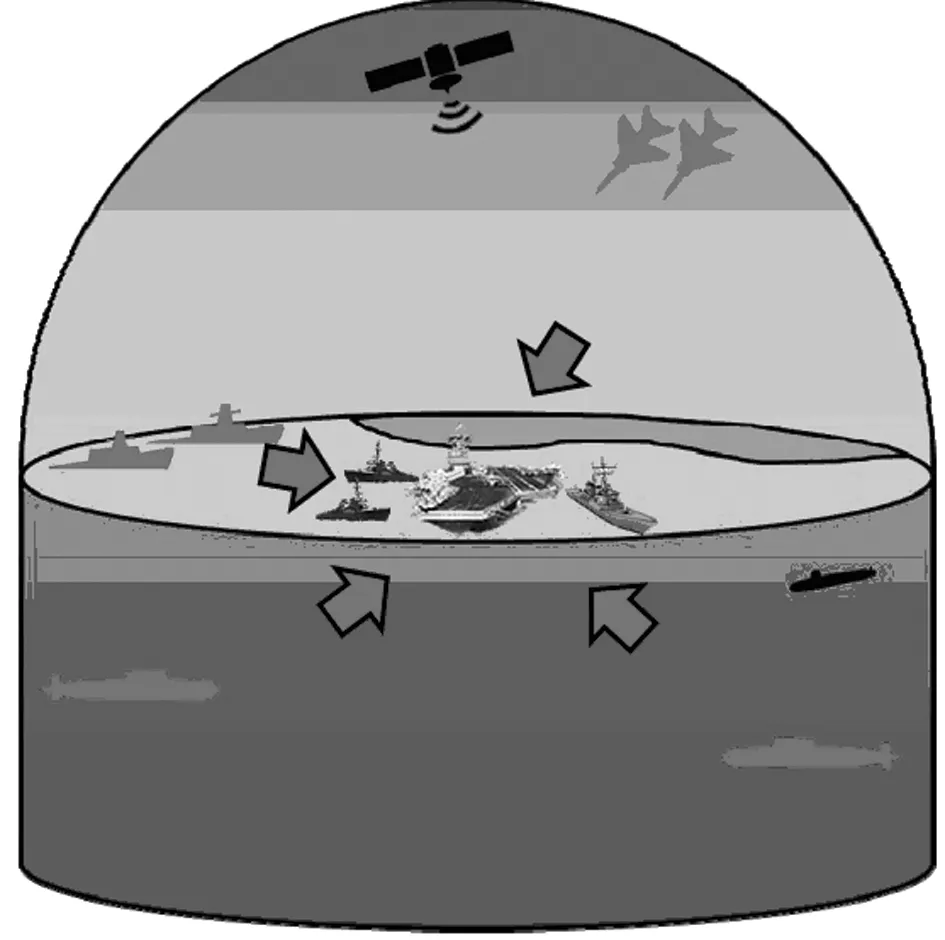
图1 围绕关键平台的传统海战模式

图2 CDMaST作战体系构成
1.2 “战术侦查节点(TERN)”
世界大陆98%的区域位于海岸线1 666 km的区域内,若近海小型舰船能够发射和接收长航时无人机,将可快速抵达热点区域,扩展态势感知和打击能力。为解决长航时无人机上舰问题,DARPA和海军研究实验室联合开展了TERN项目,其目的是赋予前沿部署的小型舰船成为中空、长航时无人机系统机动发射和回收平台的能力,为舰艇提供远程情报、监视、侦查信息,扩展打击范围。根据DARPA项目公告,TERN无人机将可携带约270 kg任务载荷,作战半径1 700 km,能够在滨海战斗舰、两栖运输舰和货船上起降,如图3所示。TERN项目于2013年启动,2015年开始制造全尺寸无人机原型,预计2016年开始飞行测试。
1.3 “九头蛇无人潜水母舰(Hydra)”
美国海军当前部署的无人潜航器(UUV)和无人机(UAV)能够执行远程侦查和攻击任务,但只能围绕在载人舰队的周围,活动范围有限,而且会大幅度增加舰队的操作成本。DARPA于2013年8月公布了Hydra项目[3],研制可搭载UUV和UAV的无人潜水母舰,如图4所示。该无人潜水母舰可在防区外海域部署超过几周甚至数月,需要时即可发射UUV和UAV,执行情报、侦查、监视任务,形成作战网络。Hydra项目自身无人操作,所有行动均在水下完成,能够长期部署于热点海域,需要时启动系统。作为水下航母,Hydra项目将对美国海军维持未来作战优势具有重要作用。
1.4 “预置式上浮载荷(UFP)”
2013年,DARPA发布了UFP项目公告,研发一种可提前部署至热点海域、长时间置于深海密闭舱内的水下分布式无人系统,可在需要时通过远程操控快速升至水面,完成态势感知和作战任务,如图5所示。2014年,UFP计划完成了概念设计和可行性评估,目前正在进行小型传感器、分布式通信和导航系统以及新型远程通信系统的开发,接下来将开展子系统整合,并进行演示验证试验。
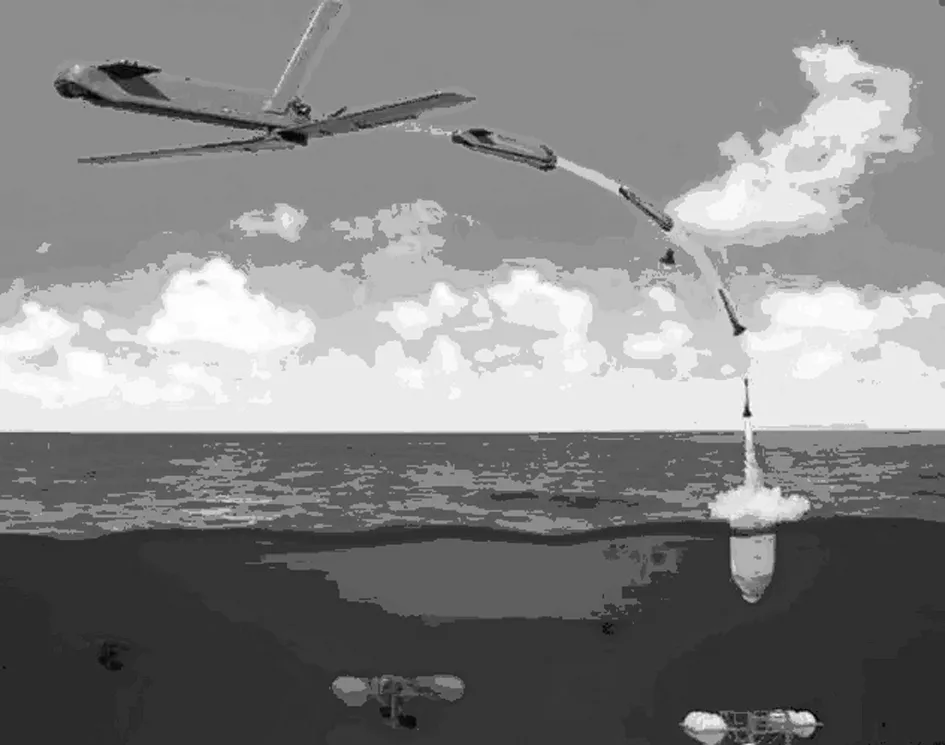
图5 UFP可在需要时远程操控升至空中执行任务
1.5 “分布式敏捷猎潜(DASH)”
随着潜艇隐身技术的发展、攻击能力的增强,以及成本的降低和扩散数量的增长,潜艇对传统海上平台形成了严峻威胁。DARPA DASH项目试图通过开发先进远程感知无人水下系统来抵消上述非对称优势,在开放区域,DASH将使用深海被动声呐,呈节点状工作在海洋深处,相当于海洋中的卫星,背景噪声低,数量灵活可调,由下至上探测,对上方的潜艇有宽广的视场,多个协同工作的声纳平台能够发现并跟踪大片区域的潜艇。在近海区域,DASH采用机动式主动声纳对发现的潜艇进行跟踪。为此,DARPA将为 DASH项目开发两个原型系统,分别是“可靠声学路径转换系统”和“风险性控制潜艇(SHARK)”,如图6所示,分别与上述两种工作环境相对应。目前DARPA正与海军共同开展海上样机测试。

图6 DASH SHARK海试
1.6 其他
现代海战不仅仅是水面与水下的有形较量,还牵涉到空间、航空、陆地等多维作战力量的整合以及网络、电磁领域的无形对抗。DARPA“高超声速打击武器”计划、“体系集成技术与实验(SoSITE)”、“拒止环境下的协同作战”、“分布式作战管理”计划都可能对海战场作战方式、作战手段和作战效果产生重大变革。
2 DARPA支撑海战场作战的装备和技术研究项目
2.1 “反潜持续追踪无人艇(ACTUV)”项目
随着水下和水面作战环境的日益复杂,尤其是常规潜艇静音性能不断提升和大量长航时深潜无人潜航器的出现,对水下目标的探测和侦察更加费时费力,反潜作战的任务量和难度空前加大。为应对此挑战,DARPA于2010年启动了ACTUV项目,旨在研发一种可长时间(2~3个月)在广阔海域对低噪柴电潜艇进行探测跟踪的无人舰艇,如图7所示。舰上搭载有光电传感器、远程和近程雷达、光探测设备、可扩展模块式声纳系统以及磁探测阵列和人工智能处理系统。ACTUV探测系统能够同时跟踪水面的船只和水下的潜艇,人工智能处理系统会根据搜集到的数据推测目标潜艇的潜在意图,智能调整工作路线,避免在跟踪潜艇时与水面船只碰撞。ACTUV具有无人自主驾驶、长时间巡逻和自动搜索跟踪等技术优势,服役后将大幅度提升美军反潜作战实力,成为未来海上猎潜的侦查尖兵。该计划经历了概念定义、可行性分析、系统设计与建造,已于2016年4月开始海试。

图7 ACTUV跟踪静音柴电潜艇
2.2 “竞争环境下目标识别与适应(TRACE)”
在目标密集的环境中,对手可利用诱饵和背景来降低现有目标识别装备的性能。目前基于人工和机器的图像识别虚警率高,且自动目标识别算法需要耗费大量资源,降低了雷达系统总体性能。DARPA针对以上问题,开展了TRACE项目,并制定了三个主要目标:在较低计算能力的空中平台上实现军事目标识别;降低复杂环境中目标识别的虚警率;在训练数据有限的情况下实现对新目标的快速识别。2014年,DARPA发布TRACE项目公告,将在2016年底前开发出先进的雷达目标识别算法,并设计出一种低功耗、实时的雷达识别系统;在2018年三季度之前完成算法改进并在普通处理器上完成试飞,在典型的空对面作战场景中验证算法性能和处理器资源消耗。2015年7月,美国空军研究实验室代表DARPA为该项目授予DLA公司价值600万美元的合同进行技术开发。
2.3 “量子传感器计划(QSP)”
根据经典物理学,传统传感器的分辨性能与工作波长成反比,波长越短,分辨率越高,但是大气层对电磁辐射的散射和吸收作用限制了可以感知环境的波长范围,制约了军用传感器的实际分辨率。根据量子力学理论,分辨率是由具有量子态的多个光子的总能量决定的,与工作波长无关,为开发新型高分辨率传感器提供了理论基础。2007年,DARPA发布了QSP计划[4],该项目旨在开发一种实用型传感器系统,利用纠缠、压缩等非经典的光子态,显著改善传统军用传感器的分辨性能。该项目分为三个阶段:(1)将研究集中量子传感器方法,第一类方法是通过传感器向目标发射纠缠光子,第二类方法是将光子的纠缠态约束在传感器的检波器内,第三类方法基于“鬼成像”技术开发量子传感器,以确定在室外环境能否通过纠缠而改变传感器的分辨率,并明确光子与目标之间的相互作用;(2)定义具体技术要求;(3)开始研制量子传感器。
2.4 认知雷达技术
认知雷达技术基于知识雷达、知识辅助雷达和自适应雷达,20世纪80年代,美空军提出开展基于知识雷达研究,用于动目标显示和恒虚警率,扩展了自适应处理过程中可用的信息源。2001年,DARPA与美空军研究实验室启动“知识辅助传感器信号处理与专家推理”计划,开发应用基于知识和知识辅助算法的实时知识辅助嵌入式计算架构。2006年,加拿大Haykin教授领导的认知团队提出认知雷达概念,利用经验知识和学习,实现发射接收的全自适应。2010年,DARPA的Joseph R.Guerci[5]撰写了第一部认知雷达专著,全面系统地阐述了认知雷达的发展,提出了认知雷达技术架构,指出了认知雷达实现的关键,在2014年的国际雷达会议上,Guerci教授又提出认知全自适应雷达概念,实现收发、雷达与环境的联合最优化。另外,DARPA还开展了自适应雷达对抗和行为学习自适应电子战计划开展认知电子战研究。
2.5 其他
除了上述装备技术领域,DARPA开展的以ASTIR“下一代成像雷达”计划和ViSAR“视频合成孔径雷达”计划为代表的太赫兹系统与器件研发计划、“创新性天基雷达天线”计划、平流层预警飞艇“传感器即结构”计划、微波光子技术计划、以及以“雷达通信频谱访问共享”与“先进射频电子地图”为代表的频谱管理技术都会推动海战场新质作战能力的生成。
3 海战场预警探测系统发展方向
3.1 系统构成向功能集中和功能分散两个方向发展
从国外公开的下一代武器装备发展规划来看,无论是空间卫星,临近空间高超声速打击武器和预警飞艇,空中战斗机、预警机、轰炸机,海上航母、驱逐舰等大型舰船或潜艇,其预警探测系统无不向高功率、大口径、高集成、高性能方向发展。这一方面是完成复杂背景下对隐身、高速、高机动目标远距离、大空域、高精度、高分辨、快速反应、时敏打击等作战任务需求的外在推动,另一方面是摩尔定律推动的计算能力以及阵列技术、信息融合处理技术、系统集成技术等电子技术的进步为实现高性能、高价值平台提供了内在技术支撑。面对中等实力的对手,功能高度集成的高价值平台依然是未来海战场取得作战优势的核心装备。然而,目前预警探测装备使用定制的软件和硬件,各子系统之间通过硬链接方式组合在一起,系统研制、调试排故和升级更新难度大、周期长,难以跟上技术更新换代的速度。为了解决上述困境,林肯实验室在20世纪90年代中期制定了雷达开放系统架构,对实验室空间监视复合体的四部雷达进行了改造,美军2000年提出了软件化雷达概念,2009年成立了开放式雷达体系结构国防支援团队推动软件化雷达的发展,并成功在美国空军三坐标远程雷达上进行了验证。为了利用技术的进步升级性能,未来功能集中式预警探测系统将向开放式、模块化、软件化方向发展。
功能集中平台的另一个问题是系统复杂、价格昂贵、操作控制难度大,美军正探索将单个高价值装备上功能繁多的任务系统打散到多个小型平台上,发挥小平台灵活、廉价、饱和攻击、协同探测等的优势。DARPA于2014年发起SoSITE项目,探索一种更灵活的方式将单个武器系统的能力分散到多个有人、无人平台和武器上。为配合SoSITE计划的开展,美军还开展了“小精灵”、“低成本无人蜂群”等项目,利用算法、软件和电子技术方面的进步,在有人和无人平台编队中分配功能获得最佳效费比,通过作战管理的自主化协调分布式作战效果,通过系统的异构性来减少共同弱点并提升系统适应能力,如图8所示。另外,美国战略能力办公室也与美军合作,研制基于商业技术的套件,将小型舰船与大型舰船组成自主航行海上蜂群,小型舰船以蜂群的样式监控危险海域,为大型舰船进行护航。2014年8月,美国海军在詹姆士河对13艘无人水面巡逻艇(其中,5艘自动控制,8艘远程遥控)进行了蜂群作战测试,试验中,美国海军利用这13艘无人艇为一个重要目标护航,途中利用无人艇群的传感器网络发现了模拟的敌方船只,艇群随即做出反应,包围和拦截敌方船只,有效阻止威胁迫近己方高价值目标,如图9所示。

图8 分布式空中蜂群

图9 分布式海上蜂群
3.2 协同探测向更广维度延伸
为实现对海上低可观测和超低空目标的超视距探测和拦截,美海军1994年提出“协同作战能力(CEC)”系统,通过编队内各舰船、预警机平台的传感器协同探测和复合跟踪,形成单一、实时、火控级的合成航迹,生成统一、精确的威胁态势图,并通过数据链在编队内所有平台共享,从而消除地球曲率对雷达探测距离的限制,扩展防空导弹的杀伤范围。
2010年美国启动海军“一体化防空火控系统(NIFC-CA)”,NIFC-CA是CEC的进一步延伸和扩展,旨在基于CEC、TTNT等数据链技术,实现航母驱护编队、预警机、战斗机、电子战飞机等作战平台的传感器系统、电子战系统、武器系统的网络化协同,构建编队内分布式探测-跟踪-火控-打击的防空拦截链,扩展单舰防御范围,实现编队的协同作战和超视距防空作战能力[6],如图10所示。2015年,该系统正式部署于“罗斯福”航母打击群,实现初始作战能力。2016年9月,F-35B和“宙斯盾”武器系统在白沙导弹靶场完成联合实弹测试,F-35B充当传感器角色,探测超视距威胁目标,通过机载“多功能先进数据链”将数据发送至地面站,地面站将数据发送给美国海军“沙漠战舰”上的“宙斯盾”武器系统,后者发射“标准”防空导弹拦截摧毁目标。
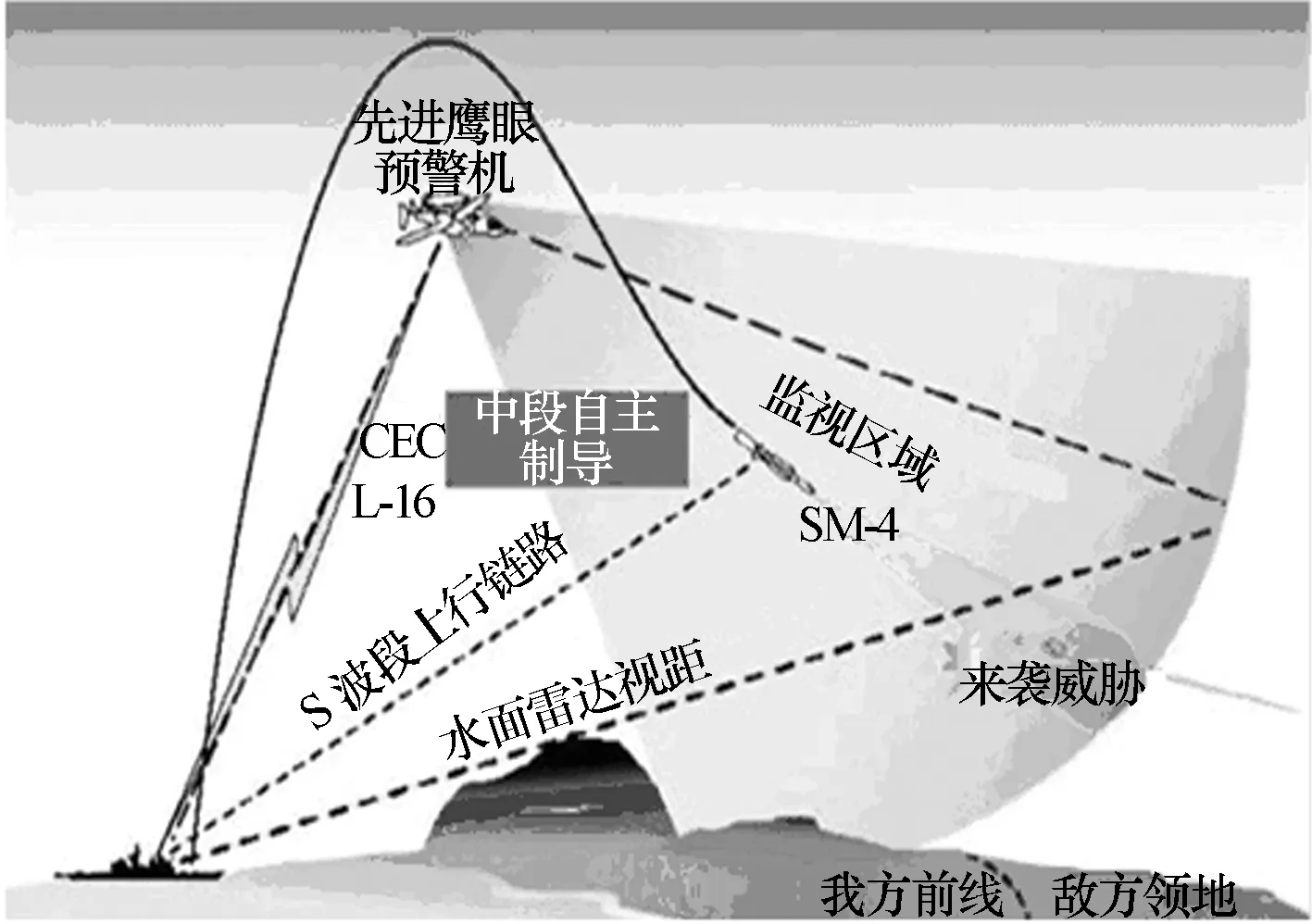
图10 NIFC-CA将使作战范围扩展到拦截弹的最大作用距离
在NIFC-CA取得初步成功的基础上,2015年10月,DARPA发起“跨域对海监视与瞄准(CDMaST)计划”,论证在高对抗环境下,利用水下、海上、空中等有人、无人系统的雷达、光电、水声探测装备,构建广域、跨域、分布式对海监视瞄准体系架构。CDMaST将把无人作战、分布式蜂群、第三方制导、跨域协同从体系上推进到一个新的层次。根据DARPA发布的信息,CDMaST一种作战方式为:首先,无人潜航器探测到敌方水面舰船,将数据传送至水面浮标;再通过无人舰或无人机将数据中继至水面有人平台;最后,发射远程导弹完成反舰作战,如图11所示。

图11 CDMaST典型作战流程
3.3 智能化水平不断提高
随着无人机、无人舰船、高超声速武器等无人装备的迅速发展,其搭载的预警探测装备需要能够自主进行波形和频率选择、模式切换、资源调度、信息处理等执行目标探测、跟踪、识别、打击、评估,完成作战任务。目前,DARPA开展的认知雷达、认知电子战等计划均要求能够通过感知外界环境的变化,自适应调整发射参数,实现与目标和环境的最优匹配,达到最优的作战效果。将来,快速发展的人工智能研究成果也将提高预警探测装备的智能化水平。
2016年8月,DARPA发布“可解释的人工智能”公告。该项目以机器学习和人机交互为研究重点,寻求建立一套具有可说明模型的机器学习技术,与可解释性技术结合后,可以使最终用户理解、信任并管理新一代的人工智能系统。XAI项目包含两个关键技术领域:一是开发可解释的学习系统,其中包括可解释性模型和解释界面;二是有关解释的心理学理论。面临的开发挑战包括如何生成更多模型、如何设计解释性界面以及如何理解产生有效解释的心理需求。这一人工智能项目将从2017年5月开始,持续时间为4年。
4 结束语
为了支撑作战体系和系统装备的实现,DARPA还开展了一系列基础支撑技术的研究,如将对武器装备小型化、智能化、轻量化产生颠覆性影响的微系统技术,能在整个X波段进行相参采样的“直接采样数字接收机”技术,实现光子、电子、MEMS等多样化器件与硅基衬底异质异构集成的“多源可用异质集成”技术、将信号/数据处理所需功率降低到目前水平1/100~1/1 000的“全向高性能计算”技术、以及“芯片内/芯片间增强冷却”技术等,这些技术将对海战场预警探测系统的发展产生持续性深远影响。
[1] DARPA.Breakthrough technologies for national security[EB/OL].http://www.darpa.mil/attachments/DARPA2015.pdf.[2015-03-26].
[2] DARPA.Cross domain maritime surveillance and targeting[R].DARPA-BAA-16-01,Virginia:PARPA,2015.
[3] DARPA.Hydra[R].DARPA-BAA-13-39,Virginia:DARPA,2013.
[4] DARPA.Quantum sensors[R].DARPA-BAA-07-22,Virginia:DARPA,2007.
[5] GUERCI J R.CoFAR:cognitive fully adaptive radar[C]//2014 IEEE National Radar Conference Proceedings.[S.l.]:IEEE Press,2014:984-989.
[6] DARPA.System of systems integration technology and experimentation[R].DARPA-BAA-14-40,Virginia: DARPA,2014.
叶显武 男,1971年生,硕士,高级工程师。研究方向为雷达技术与管理。
Development Trend Study of Marine Early Warning and Detection System by Reviewing DARPA Current Research Programs
YE Xianwu
(Navy Representative Office of Electronic Equipment Resident in Nanjing Area,Nanjing 210039,China)
Sea dominance is still strong nations' military competition focus.The paper introduces DARPA's marine operation mode research programs,such as CDMaST,TERN,Hydra,UFP,DASH,etc.,and depicts equipment and technology research projects supporting marine battlefield,such as ACTUV,TRACE,quantum sensor,cognitive radar,etc.Finally,the paper presents development direction of future marine early warning and detection system in three aspects as system function composition,cooperative operation dimension and intelligent system.
DARPA; marine battlefield; cooperation; unmanned system; intelligent system
��工程·
10.16592/j.cnki.1004-7859.2016.10.004
叶显武 Email:xianwuye@sohu.com
2016-07-05
2016-09-09
TN98
A
1004-7859(2016)10-0013-05
猜你喜欢
电子制作(2019年15期)2019-08-27
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
小学生学习指导(低年级)(2018年12期)2018-12-29
能源(2017年10期)2017-12-20
能源(2017年5期)2017-07-06
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
火控雷达技术(2016年3期)2016-02-06
雷达与对抗(2015年3期)2015-12-09
