
卫星导航系统接收机原理与设计——之六
2016-11-14 08:37:10刘天雄
卫星与网络 2016年4期
+ 刘天雄
卫星课堂
卫星导航系统接收机原理与设计——之六
+ 刘天雄
4.5.2 数字信号检测Signal Detection
上文假设接收机已经获取当前导航信号伪码延迟和多普勒频移参数对的预估值,因此,接收机可以利用当前估计的伪码延迟和多普勒频移参数对产生本地复制码。但是,GNSS接收机基带数字信号处理通道首次建立初始状态时,接收机并不能预估出导航信号的参数对(伪码延迟和多普勒频移),因此数字信号处理通道需要搜索可见范围内的所有的卫星(信号),即所谓的“冷启动”。
接收机利用信号处理通道中的捕获模块(Acquisition mode)搜索导航信号,每个信号处理通道搜索所有可能的参数对(伪码延迟和多普勒频移),接收机根据导航信号的参数对生成本地复制的伪码信号(对于GPS等卫星导航系统采用码分多址CDMA导航信号体制,每颗卫星播发唯一的伪随机测距码信号,即对于接收机而言,伪码信号族是已知的,只需根据伪码延迟和多普勒频移参数对,就可以判断并生成与接收到的导航信号相对应的本地复制信号),然后将接收到的导航信号与接收机本地生成的复制伪码信号进行相关处理,相关结果的大小可以判断复制信号的伪码延迟和载波相位与导航信号的接近程度,一旦搜索到导航信号,信号处理通道中的跟踪模块(Tracking mode)就能够持续跟踪导航信号。
然而,如前文所述实际系统存在大量噪声且有可能在动态环境下解算位置,仅靠导航信号与本地复制伪码信号的自相关处理,很难检测出淹没在底噪中的导航信号。一般根据下列统计决策公式评估导航信号的检测与否,
式中: M 是非相关积分总数;
Y是接收到的导航信号与本地复制伪码信号的自相关处理结果,其中相关积分时间为;
k是第个相关积分间隔;
统计决策结果计算出来后,在于检测门限比较,以评估底噪中是否含有导航信号。根据目标导航信号检测的虚警概率来确定检测门限值。在此过程中,图77中的基带数字信号处理通道中的“I&D”模块完成导航信号与本地复制伪码信号的自相关处理,一般有如下两种积分类型:
·相干累积(Coherent integrations):在输出导航信号与本地复制伪码信号的自相关结果之前,相干累积技术需要更长的积分时间(需要伪码长度的数倍数据)。虽然相干累积技术减少了背景噪声的不利影响,但相干累积的时间长度受到导航电文比特位翻转时间的限制,因此降低了相干累积性能;事实上,跨数据位(bit)积分会影响积分后的能量,最恶劣情况下会使积分能量为零;
·非相干累积(Non-coherent integrations):在进入统计决策评估前,非相关积分技术引入信号单次相关结果辅助检测门限比较。
导航信号与本地复制伪码信号的自相关过程中,虽然相干累积技术受限于导航电文比特位翻转时间的限制,但是非相干累积技术存在信号平方损失(squaring losses),由此相干累积技术处理效率比非相干累积技术处理效率更高。例如,在某个特定多普勒频移下,不同伪码延迟下的导航信号与本地复制伪码信号的自相关结果如图37所示。
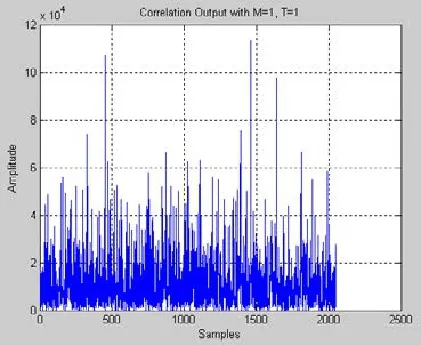
图37 特定多普勒频移下,不同伪码延迟下的导航信号与本地复制伪码信号的自相关结果
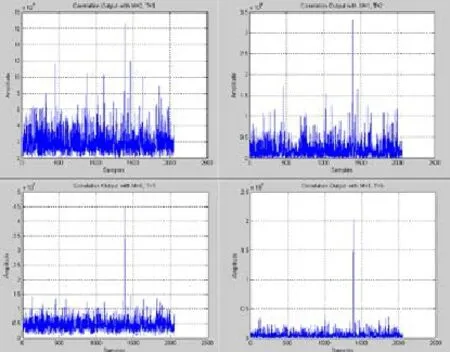
图38 不同的相干累积和非相干累积时间、不同伪码延迟下的导航信号与本地复制伪码信号的相关结果
由于GNSS卫星导航信号中存在大量噪声,显然不能根据自相关结果直接看到导航信号与本地复制伪码信号的自相关峰值,为了进一步说明自相关过程,同一导航信号在不同的相干累积(相干累积时间为T)和非相干累积(非相干累积总数为M)情况下,导航信号与本地复制伪码信号的自相关结果如图38所示,显然随着相关积分时间为和非相关积分总数为的增加,相关结果代表的信号能量也在增加,因此出现了较为明显的相关峰值,由此得到了第一个伪码延迟(相位)估计值。
图38的示例表明,一方面,虽然相干累积技术受限于导航电文比特位翻转时间的限制,但由于非相干累积技术存在信号平方损失,同非相干累积技术相比,相干累积技术能够获得更大的相关信号能量以及较低的底噪。另一方面,在伪码位(bit)同步前,由于非相干累积技术不需要考虑导航电文跨数据位(bit)积分影响,因此,非相干累积技术信号处理过程中更加安全。
此外,相干累积技术和非相干累积技术还需要考虑背景信号噪声、虚警概率、检测概率以及平均捕获时间,事实上,在给定的导航信号的参数对(伪码延迟和多普勒频移)条件下,累积时间越长、检测概率越高、虚警概率越低、捕获速度越慢。
在卫星导航系统GNSS用户接收机的信号跟踪模块中,为了降低噪声幅值同时提高捕获精度,同样也用到了上文中的信号相干累积技术和非相干累积技术。其好处是,在伪码位(bit)同步后,接收机可以增加积分时间直到一个伪码位(bit)的持续时间,例如GPS系统 L1频点C/A信号中的导航电文的持续时间是20 ms。目前Galileo等现代化的卫星导航系统,在导航信号体制设计中已采用所谓的导频通道(pilot channels)技术,导频通道不调制导航电文数据,由此能够进一步延长相干累积时间。延长相干累积时间的方法也可以用于跟踪室内等环境中的内微弱信号,但性能受限于数据位长度和多普勒频移估计精度。
4.5.3 多普勒频移去除Doppler Removal
通过估计接收导航信号的载波相位,接收机信号处理通道的多普勒频移去除(Doppler Removal)模块负责调整接收信号的相位,去除CDMA信号体制的中估计出来的多普勒频移(GPS和Galileo等卫星导航系统采用CDMA信号体制)。GLONASS卫星导航系统采用FDMA信号体制,空间所有的导航卫星播发相同的伪随机测距码PRN,每颗卫星播发信号的中心频点和带宽不同(精密分配L频段信号),这种情况下,多普勒频移去除模块除了估计导航信号多普勒频移(Doppler frequency),同时还要估计每颗卫星的中心频点偏移(centre frequency shift)。
高动态环境下,不仅导航卫星运动会带来多普勒频移,载体的高速运动将使多普勒频移范围更大,多普勒频移范围过大将使频域带宽增加,使得卫星导航接收机的快速捕获和稳态跟踪变得十分困难。以GPS卫星为例,卫星运行轨道平均约为26560km,距离地面最短距离约为20192km,最远距离约为25785km,导航信号最短传播时延为67ms,最长传播时延为86ms,卫星轨道运行的平均角速度为1.458E-4 rad/s,平均线速度为3874 m/s,星视方向速度分量在位于地平线处最大为929 m/s,根据多普勒频移计算公式,
对于GPS全球定位系统L1频点(1575.42MHz)民用C/A测距码信号,由卫星运动引起的多普勒频移为,
因此,由于卫星轨道运动所产生的最大多普勒频移大约为5kHz,同样,高动态环境下,如果载体的运动速度在1000 m/s左右时,载体的运动导致的多普勒频移也约为5kHz,结合载体和卫星的运动,接收机所接收到的导航信号综合最大多普勒频移为±10kHz。对于战略导弹的运动速度按7900 m/s估计时,接收机所接收到的导航信号最大多普勒频移会达到±100kHz。
常规的跟踪环路都是假定载波的中心频率是不变的,多普勒频移也是比较稳定的,接收机一旦捕获到导航信号,跟踪过程中不会有太大的变化,实际载波频率在中心频点附近小幅度地跳动,跟踪环路在额定带宽下可以保持跟踪校正。若载波信号附带有超出常规的多普勒频移,常规载波锁相环PLL要想保持载波频率的稳态跟踪,就必须增加环路滤波器的带宽,增加环路滤波器的带宽将引入更多环境噪声,并大幅增加整个系统的误差。如果不增加环路滤波器的带宽,那么载波多普勒频移将超出载波锁相环PLL的牵引范围,导致信号失锁,影响码环跟踪和电文解调,因此,高动态环境下导航信号跟踪需亚采用特殊的方法。
4.5.4 相关、积分累积和本地伪码生成Correlators,Accumulators and Local Code Generation
用户卫星导航接收机中的数字信号处理模块中的相关(Correlators)、积分累积(Accumulators)和本地伪码生成(Local Code Generation)模块负责完成对接收到的导航信号的测距码与接收机本地生成的复制测距码的相关处理,其中利用当前的导航信号伪码延迟和多普勒频移估计来生成接收机本地生成的复制测距码信号,为了获得接收到的导航信号的测距码与接收机本地生成的复制测距码的同步特性,需要完成两者的相关处理。
对接收到的导航信号与本地复制伪码信号之间的相关处理是实现GNSS接收机与导航卫星之间实现时间同步、计算卫星与用户机之间的伪距、解调导航电文的关键,由此才能根据定位方程解算出用户的位置坐标。其原因在于导航卫星播发信号中的测距码(ranging code)调制在载波(carrier)上,测距码又称为伪随机噪声码PRN(Pseudo-Random Noise),随机噪声码PRN扩频处理后播发给用户。
4.5.4.1 相关处理数学模型 Correlation: Mathematical Model
两个信号x和y,在时域的连续相关函数定义为:

式中: * 为复共轭;当x=y时, 相关函数也称为自相关函数ACF(Auto-Correlation Function)。
考虑一个低通滤波处理且具有稳定功率的信号,例如GNSS接收机处理的导航信号,相关函数可写为:

信号自相关函数的傅立叶变换(Fourier transform)定义为信号的功率谱密度函数,即有:

由于GNSS接收机处理的是数字离散信号,离散数字信号的自相关函数ACF定义为:

4.5.4.2 相关处理流程Block Diagram
相关处理流程如图39所示,为简化说明信号相关过程,图中略去多普勒频移去除模块,而且只考虑接收信号的测距码与接收机本地生成的复制信号测距码相位“对齐”时,即取得最大相关峰值情况,
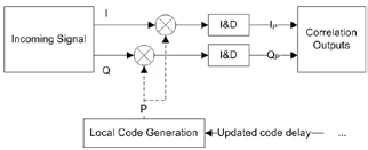
图39 接收信号与复制信号的相关处理流程
根据接收信号测距码的相位延迟生成接收机本地复制信号,在接收机开展接收信号与复制信号的相关处理前,接收信号测距码的相位延迟可以预估复制信号相位移动的位置,当接收信号的测距码与本地复制信号的测距码相位一致,相关处理得到最大值。
事实上,由于接收机接收到的卫星导航信号不可避免地受到外部干扰并存在大量噪声,一般很少只用接收信号与复制信号的相关处理峰一维信息来评估两者相关输出结果。接收机一般采用“积分与清零”模块不断累积相关输出结果,一般有相干累积和非相干累积两种处理方法,主要目的是通过连续合成接收信号与复制信号的相关处理结果,增加任何潜在相关峰值功率,同时降低接收信号噪声。
4.5.4.3 调制对自相关函数的影响 Effect of the Modulation on Auto-Correlation Function
接收信号与复制信号的自相关函数ACF曲线形状不仅受接收信号伪随机测距码PRN特征影响,而且也受信号调制方式自身的影响。例如,GPS全球定位系统L1频点(1575.42MHz)民用C/A测距码信号是的调制方式是BPSK(1),Galileo卫星导航系统1575.42MHz频点E1-B开放服务测距码信号是的调制方式是BOC(1,1),GPS全球定位系统L1频点军用M测距码信号是的调制方式是CBOC(6,1,1/11),接收信号与复制信号的自相关函数ACF归一化曲线如图40所示,L1频点导航信号功率谱密度函数如图41所示,
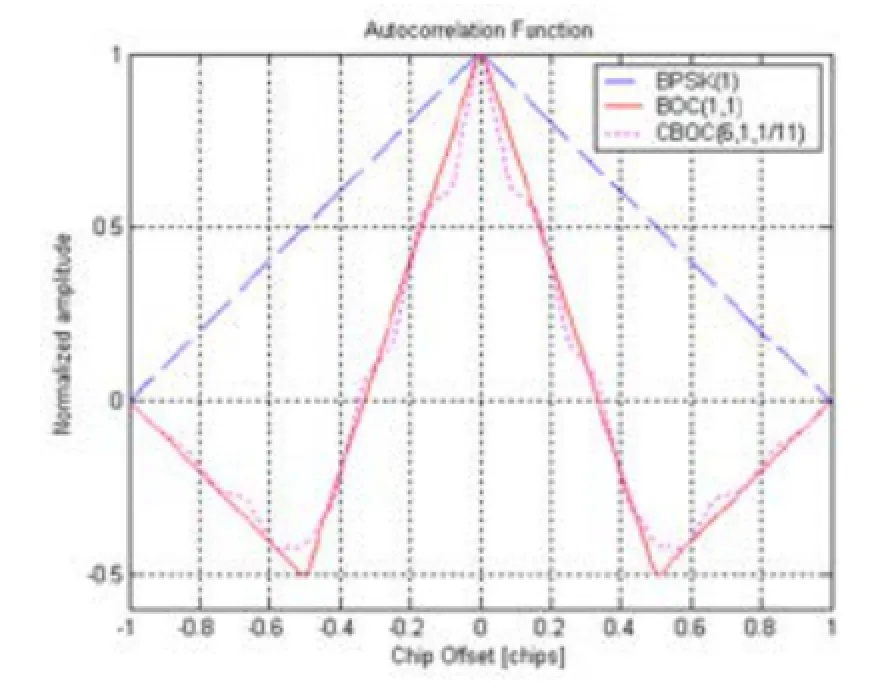
图40 接收信号与复制信号的自相关函数曲线
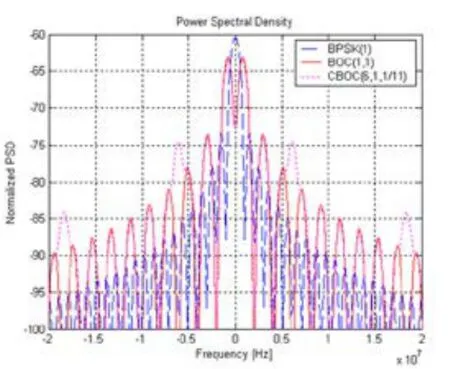
图41 L1频点导航信号功率谱密度函数
GNSS接收机通过调整本地复制测距码信号相位,跟踪接收信号与复制信号的相关峰值,并保持较高的自相关处理结果,直觉上可以认为相关峰值范围越窄,解算精度越高。根据图39所示接收信号与复制信号的自相关函数曲线,可推断在GPS全球定位系统和欧洲Galileo卫星导航系统的L1频点(1575.42MHz)信号中,军用M测距码信号的CBOC信号调制方式能够获得最高的解算精度,开放服务的BOC信号调制体制次之。由图40所示的L1频点导航信号功率谱密度函数也可进一步解释上述原因,BOC信号调制方式带宽比BPSK信号调制方式带宽要宽很多,其缺点是接收机射频前端需要处理频带更宽的信号。其次,在接收信号与复制信号的相关处理过程中,BOC信号调制方式产生多个边峰(side peaks),跟踪环路要识别边锋,确保跟踪到相关主峰。
卫星导航系统采用BOC信号调制方式的主要诉求为:
在支持GNSS全球卫星导航系统互操作(interoperability)过程中,还要确保系统间导航信号的兼容性(compatibility);
使信号在噪声(noise)、多径(multipath)以及干扰(interference)等恶劣工作环境下,导航信号具有较强的稳健性(robust);
降低信号间的自干扰(self-interference)
猜你喜欢
广东通信技术(2023年9期)2023-10-29 07:09:32
杭州电子科技大学学报(自然科学版)(2023年3期)2023-06-30 06:57:34
科学(2020年3期)2020-01-06 04:02:51
电子制作(2017年7期)2017-06-05 09:36:13
电信工程技术与标准化(2015年10期)2015-12-22 09:08:10
探测与控制学报(2015年4期)2015-12-15 15:00:50
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
太空探索(2014年1期)2014-07-10 13:41:50
陕西理工大学学报(自然科学版)(2014年6期)2014-03-25 00:37:44
陕西理工大学学报(自然科学版)(2014年6期)2014-03-25 00:37:44
