
三维激光扫描技术在钢结构厂房变形测量中的应用
2016-11-11 09:25王传庆陈四才
黑龙江工程学院学报 2016年5期
陈 泷,王传庆,陈 桢,陈四才
(1.天津市房屋质量安全鉴定检测中心,天津 300060;2.吉林建筑大学 经济与管理学院,吉林 长春 130118;3.天津市旺嘉宝建材有限责任公司,天津 300380)
三维激光扫描技术在钢结构厂房变形测量中的应用
陈泷1,王传庆1,陈桢2,陈四才3
(1.天津市房屋质量安全鉴定检测中心,天津 300060;2.吉林建筑大学 经济与管理学院,吉林 长春 130118;3.天津市旺嘉宝建材有限责任公司,天津 300380)
三维激光扫描技术是近年来发展起来的一门新技术,其被誉为“继GPS技术以来测绘领域的又一次技术革命”。为体现三维激光扫描技术在数据采集、数据处理方面的高效、快捷、准确、方便等优点,结合三维激光扫描技术的原理及特点,使用FARO Focus3D×330型三维激光扫描仪对某钢结构厂房内部进行扫描并获取大量的点云数据,采用数据处理软件Geomagic Qualify对点云模型构件进行分析,得到相应变形量,通过分析验证三维激光扫描技术应用于钢结构厂房变形测量是切实可行的。
三维激光扫描技术;点云数据;变形测量
三维激光扫描技术是一种先进的全自动高精度立体扫描技术,又称为“实景复制技术”,是继GPS空间定位技术后的又一项测绘技术革新[1]。三维激光扫描技术能够快速全面地反映建筑物的三维信息,并且其获取的三维点云数据能充分体现出建筑物的特征信息。相比较于那些传统的测量技术(如全站仪、GPS等),三维激光扫描技术具有极大的技术优势,特别是在数据采集方面具有高效、快捷、精确、简便等优点[2]。因此,三维激光扫描技术被广泛应用于工程的各个领域。
1 三维激光扫描技术介绍
1.1三维激光扫描技术的原理
目前,相位式三维激光扫描技术得到了广泛的应用(如FARO系列),与以往的脉冲式扫描技术不同,它的工作原理在于:
1)使用不同长度的等幅波对激光束进行调制,通过测量红外线光波的相位偏移,即可准确反映出激光到物体之间的距离[3],相位式三维激光扫描仪测距原理如图1所示。


图1相位式三维激光扫描仪测距原理
2) 借助特殊的调制技术,Laser Scanner Focus 3D HYPERMODULATION TM可大幅提高调制信号的信噪比。之后,通过使用角度编码器测量Laser scanner镜头旋转角度与激光扫描仪的水平旋转角度,计算出各点的X,Y,Z三维坐标值[4],测量旋转角度如图2所示。

图2 FARO三维扫描仪测量旋转角度
3) 借助扫描仪自带计算机,可以在不使用便携式计算机的情况下运行扫描。完成扫描后,用户即可轻松导航三维视图,对全部扫描数据在计算机上进行查看分析以后处理。
1.2三维激光扫描技术的特点
l) 快速性。运用三维激光扫描技术进行获取空间三维信息的速度非常快,可以实时测定实体表面三维信息,从而大大提高外业数据采集效率。
2) 实时性、动态性、主动性。扫描系统通过发射红外线光束和接收发射回来的信号来获取三维信息,并且不受光线和气压等自然因素影响,对目标进行实时观测。
3) 非接触性。扫描系统采用非接触扫描目标的方式进行测量,不需要人为接触到被测量的物体,这使得该技术可以广泛应用于各个领域。
4) 穿透性。激光具有一定的穿透性能力,到达目标实体的表面获取其大量点云信息,这些点云信息能描述目标表面不同层面的几何信息。
5) 高精度、高密度。三维激光扫描技术可以快速获取高精度、高密度的大量点云数据信息,获得的三维点云信息具有广泛的应用性。
2 三维激光扫描技术在变形测量中的应用
2.1工程概况
某工业厂房为单层钢结构建筑物,约建于2010年。建筑平面呈矩形,总长度为108.0 m,总宽度为90.0 m。建筑物檐口高度为11.00 m,室内外高差为0.25 m。该建筑框架柱设计采用焊接H型钢柱,框架梁设计采用焊接H型钢梁,屋面为复合保温双坡屋面。
2.2数据采集
本次变形测量采取单站式,针对该钢结构厂房内部单站式扫描,最终目的是为了得到钢柱的偏斜数据及钢梁的挠度变形数据。设备采用FARO Focus3D×330型三维激光扫描仪,它是一款高速激光扫描且内置拥有7 000万像素的高清相机,具有330 m的远距离扫描范围、360°×305°(水平×垂直)的超宽视野、976 000点/s的超高速扫描速度,能够简便高效地获得该项目需要的数据信息[5]。厂房内部点云如图3所示。

图3 厂房内部点云
2.3数据处理
由FARO Focus3D×330型三维扫描仪扫描后得到的点云数据需要进行数据处理,去除飞溅点、杂点和非连接点,进行点云过滤[6-8]。将扫面后的数据文件导入FARO自有的SENCE软件中,截选出需要的钢梁及钢柱构件的点云信息(见图4、图5),并结合Geomagic Qualify后处理软件对点云信息数据提取,进行3D比较、2D比较命令操作,最终得到钢柱的偏斜数据及钢梁的挠度变形数据。
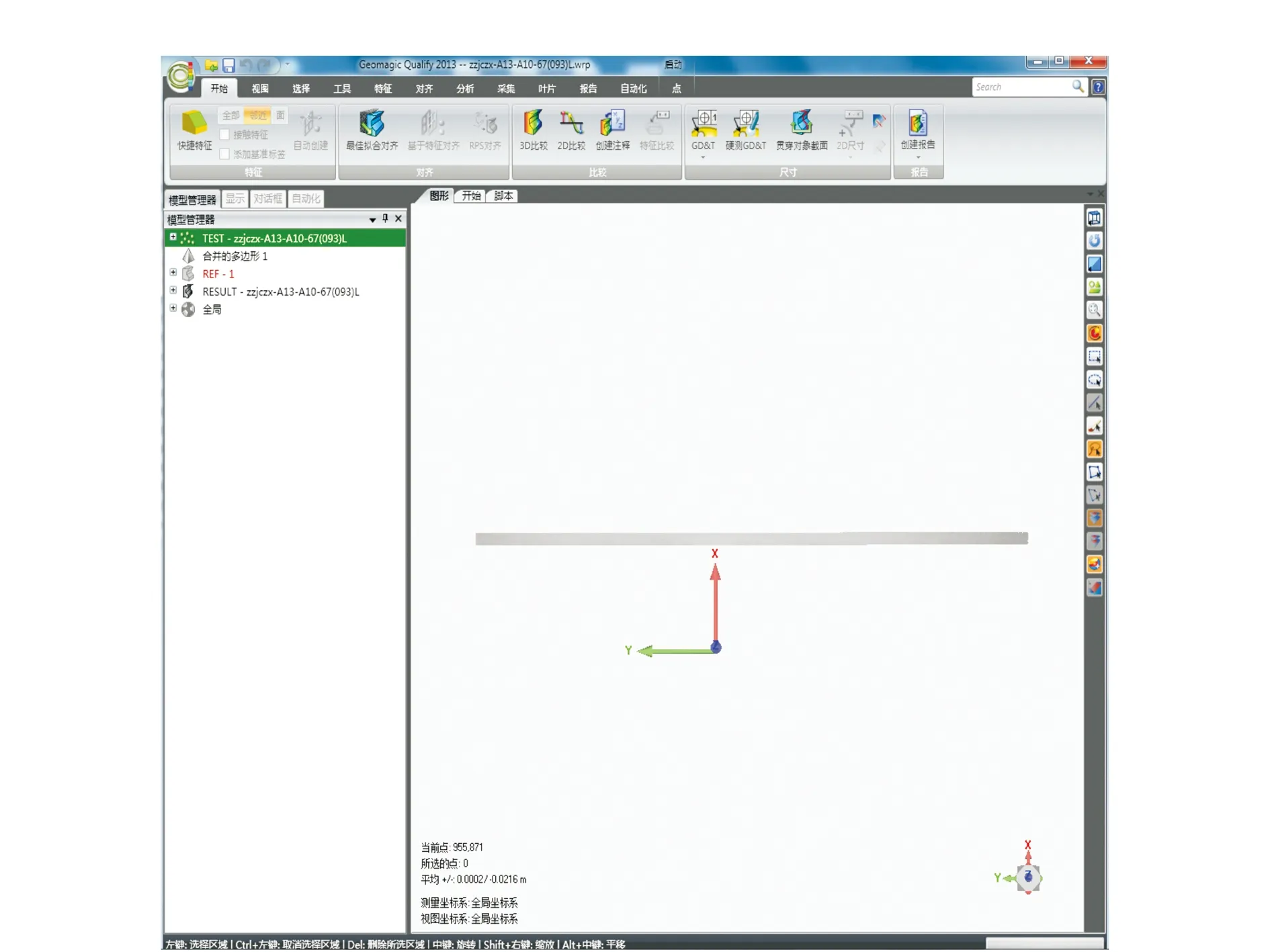
图4 钢梁点云(俯视)

图5 钢柱点云
2.4钢梁点云模型的挠度变形分析
采用三维激光扫描仪对该厂房抽测6根钢梁构件进行挠度检测,检测结果表明:所抽测的钢梁构件中最大挠度值为27 mm,所抽测钢梁构件的挠度值均未超出《钢结构设计规范》GB50017-2003中表A.1.1中L/500的规定。
2.4.13D比较分析
3D比较是在对其测试对象到参考对象后,以结果对象的形式创建出三维彩色偏差图来量化两者间的结果偏差,通过Geomagic Qualify后处理软件对截选出的钢梁点云数据进行分析[9]。以其中某1根(1轴-A轴~B轴)钢梁为例,在Geomagic Qualify软件里根据原有点云图拟合平面1(pingmian1)模型(见图6),与钢梁梁底点云图对齐进行3D偏差对比(数据见表1),通过颜色可以直观、简洁地显示出该钢梁的挠度变形情况(见图7)。
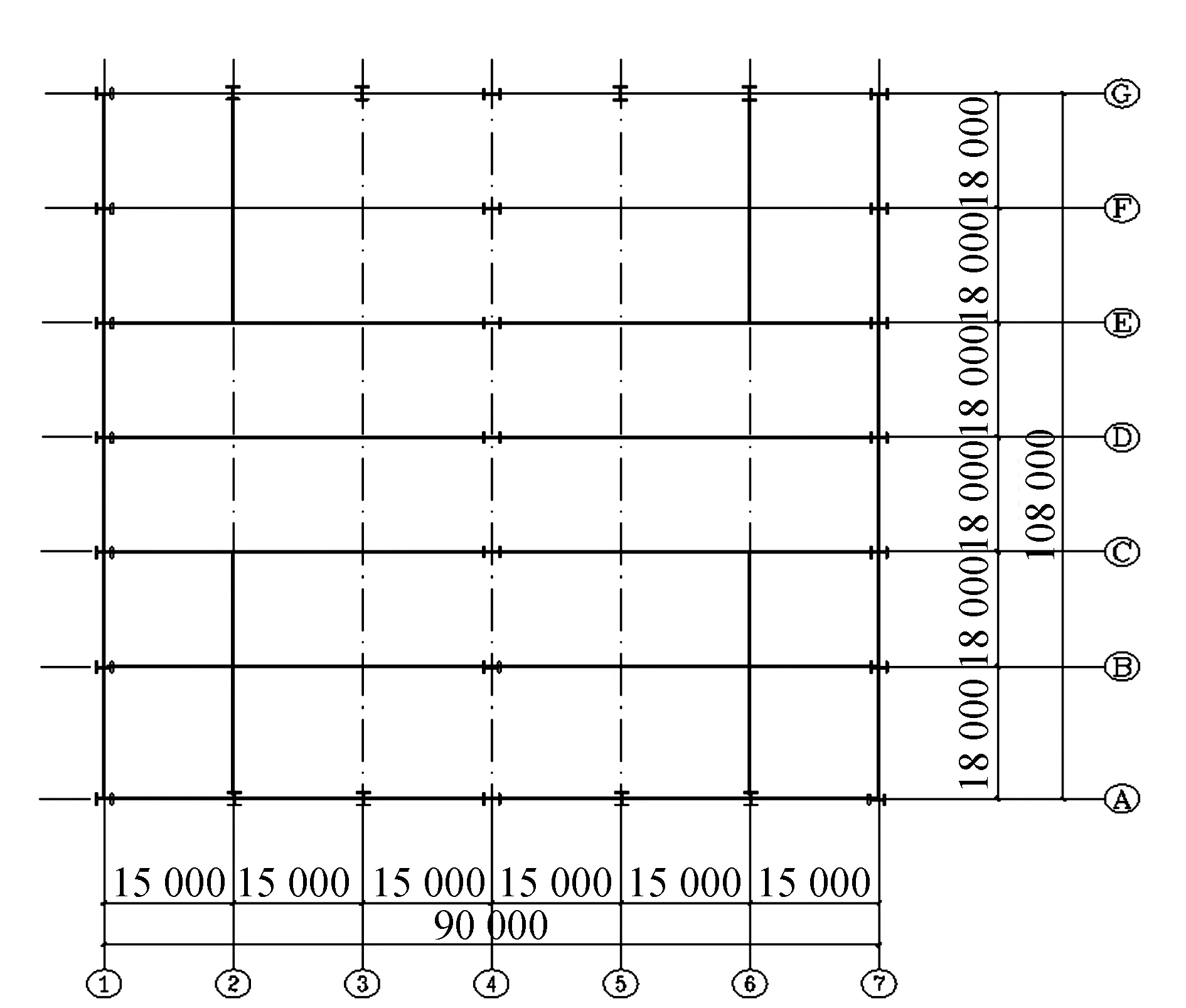
图6 结构平面

参考模型测试模型点云数量体外孤点数公差类型pingmian1liang195587111973D偏差计算单位最大临界值最大名义值最小名义值最小临界值m0.0310.002-0.002-0.031偏差最大上偏差最大下偏差平均偏差标准偏差0.001-0.0310/-0.0220.006

图7 钢梁3D模型及梁底变形量(俯视)
2.4.22D比较分析
在进行2D分析之前一定要先进行3D比较分析,2D比较分析工具可以对模型的指定截面进行质量分析,生成偏差色谱图以及对指定截面创建注释。该钢梁选取5个注释点,注释信息包含偏差值及注释点的三向坐标值,通过注释可直观、形象地显示出该钢梁的挠度变形量(见图8)。钢梁梁底挠度变形数据见表2。

图8 钢梁注释

观测数据值/mm12345最大挠度/mm梁长度实测值/mm0-17-27-200-2718000
2.5钢柱点云模型的挠度变形分析
采用三维激光扫描仪对该建筑6根钢柱构件的柱顶及中部两个方向的偏斜位移情况进行检测,检测结果表明:所测钢柱构件柱顶的最大侧向位移值为18 mm,其最大偏斜率为2.0‰,所测钢柱构件中部的最大侧向位移值为9 mm,其最大偏斜率为2.0‰。其中所测的钢柱构件一个或两个方向的侧向位移值均未超出《工业建筑可靠性鉴定标准》GB50144-2008表7.3.9中H/700的规定。
2.5.13D比较分析
在数据处理方面,钢柱的偏斜原理和钢梁的挠度变形原理大致相同,因钢柱为工字钢型,本次数据处理选取腹板和翼缘两个平面分别进行比对,以其中某一根(2轴~A轴)钢柱为例,通过Geomagic Qualify后处理软件对截选出的钢柱点云数据进行分析。在Geomagic Qualify软件里根据原有点云图拟合平面1(pingmian1)、平面2(pingmian2),分别与钢柱腹板平面、翼缘平面点云图对齐并进行3D偏差对比(见表3、表4),通过颜色可以直观、简洁地显示出该钢柱腹板平面、翼缘平面的偏斜情况(见图9、图10)。
2.5.22D比较分析
该钢柱分别在腹板平面、翼缘平面各选取3个注释点,注释信息包含偏差值及注释点的三向坐标值,通过注释可直观、形象地显示出该钢柱的两个平面偏斜变形量,如图11所示。钢柱两个平面变形数据见表5。
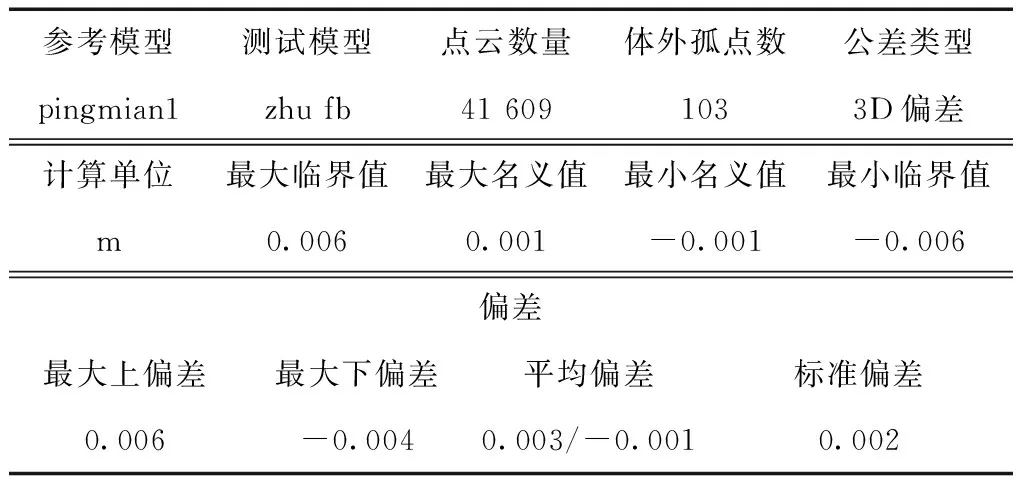
表3 钢柱腹板平面偏差分析
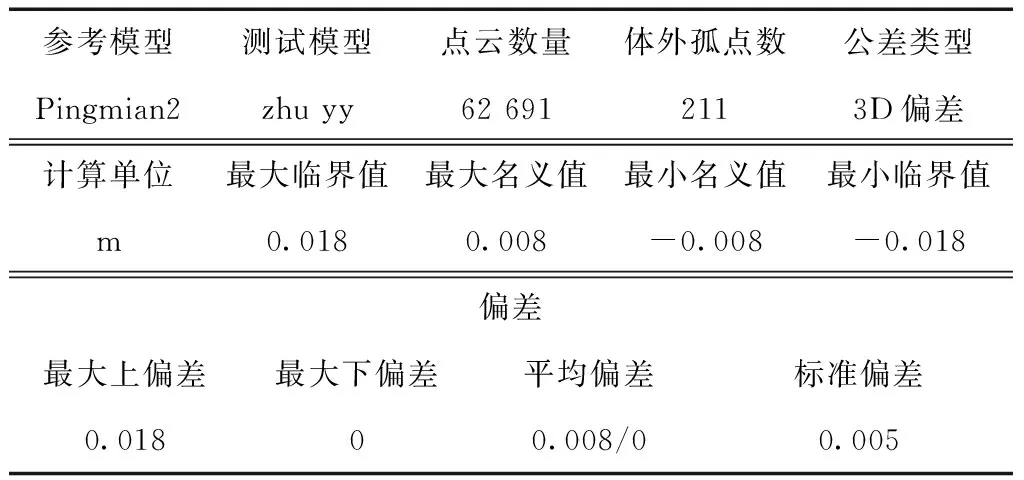
表4 钢柱翼缘平面偏差分析
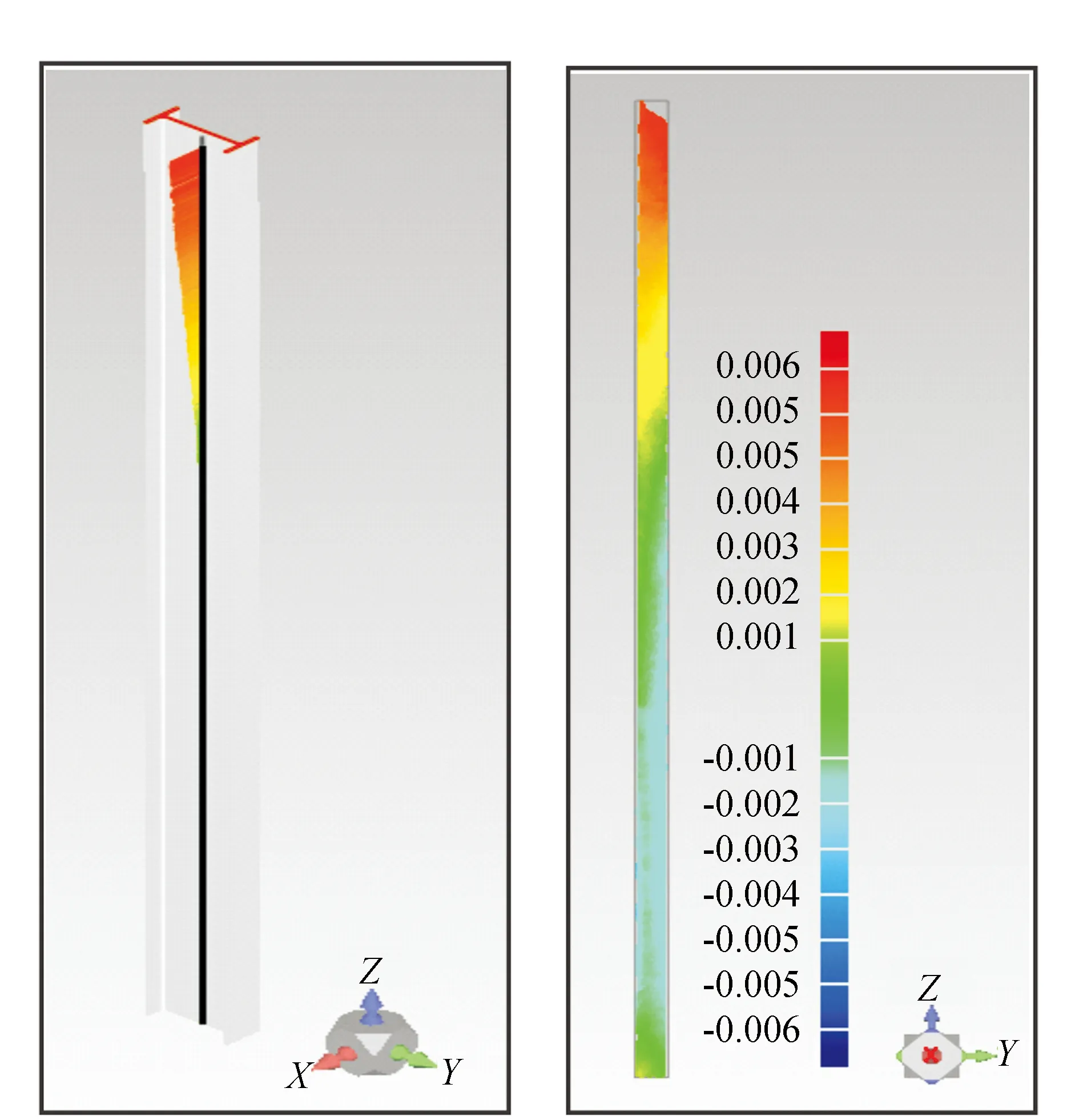
图9 钢柱腹板平面3D模型(X方向)
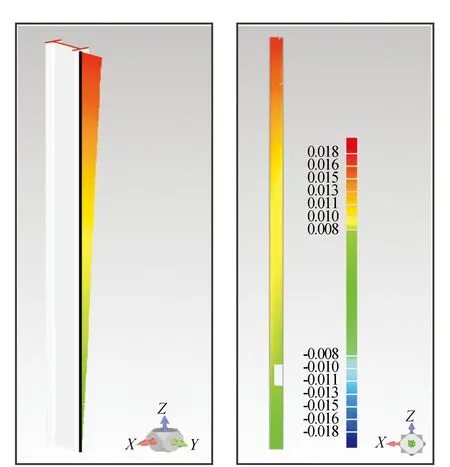
图10 钢柱翼缘平面3D模型(Y方向)

图11 钢柱注释(X,Y方向)

点号测点高度位置偏斜观测值Δ/mm测量高度值H/mm计算偏斜率/‰X方向Y方向X方向Y方向X方向Y方向1顶部测点618886089650.72.02中间测点-19433545530.22.0
3 结束语
三维激光扫描技术是目前世界上获取三维空间数据的最先进技术之一,该技术作为传统测量方法的有益补充,可以无接触、高密度、高精度、快速地获取地物信息,大大提高外业的工作效率。基于本文工程实例,应用三维激光扫描技术,可以快速、直观、形象、准确地表现出建筑物构件的变形情况。除此以外,三维激光扫描技术在其它测绘领域也有着广泛的应用[10],例如古建文物、隧道矿山、地形地貌等方面都会发挥重要作用,同时丰富和完善了测绘信息的获取手段和表现形式。
[1]马立广.地面三维激光扫描仪的分类与应用[J].地理空间信息,2005,3(3):60-62.
[2]张宏伟,赖百炼.三维激光扫描技术特点及其应用前景[J].测绘通报,2012(S1):327-329.
[3]ICHTI D,HARVEY B.The effects of reflecting surface material properties on time-of-flight laser scanner measurements [C]//Symposium on Geospatial Theory,Processing and Applications,Ott- awa,2002.
[4]SCHNEIDER D.Terrestrial laser scanning for areabased deformation analysis of towers and water dams [C]//Proceedings of 3th IAG Symposium of Geodesy for Geotechnical and Structure Engineering and 12th FIG Symposium on Deformation Measurement Oesterreich,2006:22-24.
[5]刘春,杨伟.三维激光扫描对构筑物的采集和空间建模[J].工程勘察,2006 (4):47-50.
[6]高志国.地面三维激光扫描数据处理及建模研究[D].西安:长安大学,2010.
[7]臧伟,钱林,孙宝军,等.地面三维激光扫描技术在工程测量中的应用[J].北京测绘,2015(3):134-139.
[8]吕翠华,陈秀萍,张东明.基于三维激光扫描技术的建筑物三维建模方法[J].科学技术与工程,2012(10):166-170.
[9]成思源,杨雪荣.Geomagic Qualify三维检测技术及应用[M].北京:清华大学出版社,2012.
[10]刘昌霖.三维激光扫描测量技术探究及应用[J].科技信息,2014(5):34-35.
[责任编辑:郝丽英]
Application of 3D laser scanning technology to deformation measurement of steel structure factory buildingCHEN Long1,WANG Chuanqing1,CHEN Zhen2,CHEN Sicai3
The 3D laser scanning technology is a newly-developed technology in recent years,which has been regarded as the technology revolution in the field of GPS surveying and mapping.In order to reflect the 3D laser scanning technology in data acquisition and data processing advantages of efficient,fast,accurate and convenient,this paper,combined with principle and characteristic of 3D laser scanning technology,uses FARO Focus3D×330 3D laser scanner to obtain a large number of point cloud data for internal scanning of a steel structure factory building and analyzes the point cloud model component,which uses data processing software Geomagic Qualify to get the corresponding deformation.The 3D laser scanning technology for steel structure factory building deformation measurement proves to be feasible.
3D laser scanning technology; point cloud data; deformation measurement
10.19352/j.cnki.issn1671-4679.2016.05.009
2016-04-17
陈泷 (1989-),男,助理工程师,研究方向:工程测量.
TU198+.2
A
1671-4679(2016)05-0029-05
(1.Tianjin Housing Certer for Evaluation and Inspection of Quality and Safety,Tianjin 300060,China; 2.College of Economic and Management,Jilin Jianzhu University,Changchun 130118,China; 3.Tianjin Wangjiabao Building Materials Co.,Ltd,Tianjin 300380,China)
猜你喜欢
工程建设与设计(2020年23期)2020-03-05
中华建设(2019年7期)2019-08-27
模具制造(2019年3期)2019-06-06
中国建筑金属结构(2018年4期)2018-05-23
科学与财富(2017年35期)2018-01-29
振动与冲击(2017年5期)2017-04-10
中央民族大学学报(自然科学版)(2016年2期)2016-06-27
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
现代营销·经营版(2013年5期)2013-05-14
