
利用模拟退火优化快速反射镜控制策略
2016-11-10 05:26龙柏君向汝建李国会
光学精密工程 2016年9期
龙柏君,欧 龙,向汝建,李国会
(1.中国工程物理研究院 应用电子学研究所,四川 绵阳 621900;2.中国工程物理研究院 高能激光科学与技术重点实验室, 四川 绵阳 621900)
利用模拟退火优化快速反射镜控制策略
龙柏君1,2*,欧龙1,2,向汝建1,2,李国会1,2
(1.中国工程物理研究院 应用电子学研究所,四川 绵阳 621900;2.中国工程物理研究院 高能激光科学与技术重点实验室, 四川 绵阳 621900)
由于快速反射镜(FSM)系统在不同应用场合下需要不同有效带宽和闭环带宽,本文基于压电FSM控制系统建立系统模型,通过分析系统光轴抖动情况,对FSM控制算法进行了优化。首先,测得系统闭环Bode图,利用模拟退火算法求取系统传递函数;然后,结合辨识模型与模拟退火算法,提出了一种满足不同应用场合的全局最优PID控制器。最后,通过阶跃响应测试验证辨识模型的正确性,通过闭环实验测试验证最优控制器的有效性。结果表明,辨识模型与实际系统在中低频段符合得很好,阶跃响应曲线基本一致。采用最优控制器控制的系统有效带宽为35 Hz,闭环带宽为70 Hz,跟踪精度提高了47%,基本满足当前实验环境下对FSM性能的要求。提出的系统显示良好的低频跟随能力和高频干扰抑制能力,跟踪精度高,器件损耗小。
快速反射镜;模拟退火;参数辨识;控制算法优化
1 引 言
快速倾斜反射镜(Fast Steering Mirror, FSM)具有惯量小、带宽较宽、跟踪精度高(角秒级)等优点,被广泛应用于天文望远镜、图像稳定、精密跟踪和瞄准光学系统中,用于波前误差补偿、光束定位、光束跟踪等。根据驱动器不同可以分为音圈电机型和压电型,其中音圈电机型快反镜具有作动范围大,响应快,线性度好等优点,但是跟踪精度较低,一般在角秒量级;压电型快反镜采用压电陶瓷作为驱动器,具有微弧度量级跟踪精度,陶瓷推力大,镜面响应快,但是压电陶瓷存在磁滞效应,系统具有一定非线性,陶瓷作动范围较小[1-7]。为了满足不同应用需求,各种控制器被应用于快反镜系统中。唐涛等提出一种PID-I算法,利用2个积分器控制,提高了系统误差低频抑制比和系统稳定性;王强提出一种基于理性闭环特性(最佳二阶特性)的逆向设计方法,闭环带宽达到采样频率的1/5;丁科提出一种解耦复合控制,相比于经典PID算法,将带宽提高了近10倍,田福庆等将滑模控制与反演法相结合,有效降低了跟踪误差[8-11]。这些算法仅适用于某些特殊的应用场合,并且算法复杂,工程实现困难,而且只注意抑制低频抖动和提高系统闭环带宽,未考虑由于探测器噪声、光子噪声等所引入的干扰信号。因为这些算法均会引入误差一阶微分信号或者误差二阶微分信号,由于微分器的作用,噪声等干扰信号会被极度放大,严重影响系统跟踪精度。不仅如此,快反镜长时间高频率、大幅值的跟随干扰信号还会增加驱动电源的负担和降低快反镜使用寿命。
本文针对快反镜系统在不同应用场合下应具有不同闭环带宽的问题,以实验室的压电快反镜系统为基础,首先利用模拟退火算法辨识出系统近似二阶模型,然后将模拟退火算法与辨识模型相结合,提出一种满足各种应用需求的控制器参数全局优化算法,最后通过阶跃响应测试验证辨识模型的正确性,通过闭环实验测试验证最优控制器的有效性。该算法是一种全局离线优化算法,不存在局部最优和实时性问题,且算法适用性强,可以应用于PID控制器,滑膜变结构控制器等不同控制器参数优化,可为各种应用条件下的控制器参数设计提供参考。
2 系统光轴抖动频谱分析
快反镜系统经常用于抑制光轴抖动来提高光束质量。在设计闭环带宽的过程中,往往要求把快反镜控制带宽做得尽量大。但是带宽与精度相互矛盾,过大的闭环带宽不仅不能提高系统性能,还会引入过多干扰信号,降低系统精度。文献[12]指出,在提高系统带宽时,系统闭环带宽的增大值远大于有效带宽,其采用不同控制策略将有效带宽从25 Hz提高到40 Hz时,闭环带宽从70 Hz 提高到200 Hz,所以系统带宽应该根据实际应用需求而定,设定原则是在满足应用需求的前提下尽可能的减小闭环带宽[12]。为了解实验室环境下光轴抖动情况,掌握快反镜系统带宽应用需求,分别在系统开环与闭环条件下采集FSM光轴抖动幅值随时间的变化数据,利用功率谱分析,结果如图1所示。
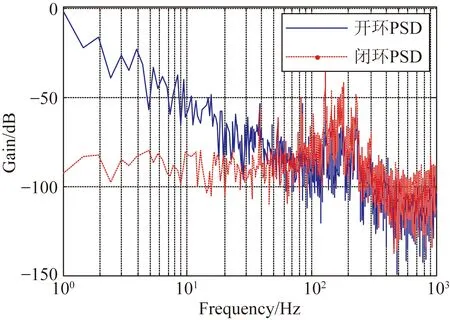
图1 系统开闭环功率谱
由图1可以看出,实验室中光轴抖动集中在低频部分,测量噪声以及机械振动导致出现高频扰动。虽然闭环后系统低频扰动被大幅抑制,但在100~300 Hz之间的干扰信号被放大,严重影响系统精度。这是因为系统跟踪高频部分的信号,不仅无法提高系统精度,反而会将干扰信号引入系统,产生过补偿现象。经过测量系统有效带宽为60 Hz,闭环带宽为260 Hz,虽然系统有效带宽较小,但是闭环带宽较大,无用的干扰信号严重影响系统精度。
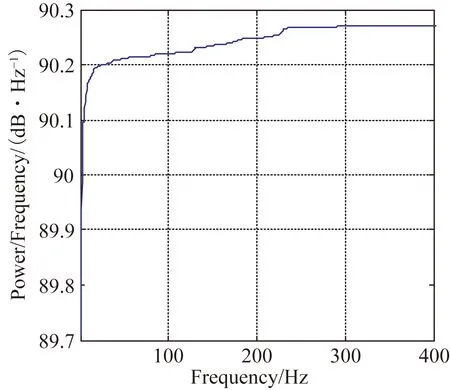
(a)开环积分功率谱
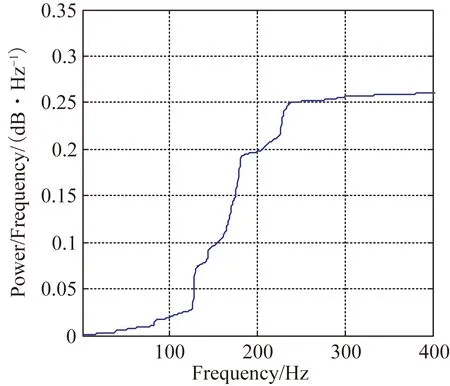
(b)闭环积分功率谱
为分析光轴抖动情况,分别对开环、闭环系统进行积分功率谱分析,结果如图2所示。开环数据总能量为90.166 4,15 Hz以上能量为0.11,开环光轴抖动99.9%的能量集中在15 Hz以下;闭环数据总能量为0.270 3,15 Hz以后总能量为0.268 9,闭环光轴抖动99.48%集中在15 Hz以后,此部分能量相比开环光轴抖动增大240倍,能量主要集中在200 Hz左右。系统校正残差主要是因为闭环带宽大,跟随并放大噪声信号所致,故希望将系统有效带宽限制在30 Hz左右,闭环带宽限制在100 Hz以下。
3 快反镜系统参数辨识
3.1参数辨识
虽然工程应用中PID控制器参数整定比较困难,但在获得系统模型的前提下,利用数值仿真的方法可以得到系统闭环Bode图,从而根据需求指导设计PID控制器。快反镜有多种数值模型,最常用的是二阶模型与三阶模型,具体采用何种模型与系统极点分布以及快反镜结构有关[13-15]。经过实验分析,实验室快反镜系统机械共振存在于高频阶段且受环境温度以及机械结构的影响,该部分系统极点远离主极点,对性能影响较小,辨识该部分的传递函数意义不大,故仅辨识系统低频部分,得到系统的近似二阶模型。常用的压电快反镜系统模型为:
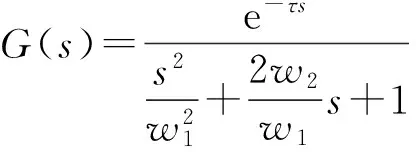
(2)
系统传递函数参数辨识有绘图法,最小二乘法,最速下降法等,绘图法获得参数存在一定误差,最小二乘算法仅适应于线性系统,最速下降法易陷入局部最优[16-18]。1982年,Kirkpatrick发现固体退火过程与最优化问题之间存在类似性,故将Metropolis准则引入到优化过程中,得到一种对Metropolis算法进行迭代的组合优化算法,称为模拟退火算法[19]。该方法在寻优过程中,有一定概率接受恶化解,从而使算法跳出局部最优值,适合进行离线优化。假设最优化问题的解为W=[w1,w2],选取辨识值与测量值的均方根为目标函数为:

(3)
其中:Ampl(i)为实际测量的光轴闭环幅值,SimAmpl(i)为根据模型计算得到的光轴闭环幅值,N为数据总数,W取值为{Wmin,Wmax}={[100,700],[0.05,0.4]},温度衰减率为0.95,初始温度为100,终止温度为0.01,马尔科夫链长度为400,W初始值为[600,0.3]。只要测得不同频率下的系统光轴闭环幅值代入式(3),就可以辨识得到系统参数。
实验室快反镜测试系统如图3所示,由标准光源、快反镜、CCD相机、上位机、下位机以及高压放大器等组成。标准光源所发出的激光经过快反镜反射后由CCD相机捕获,当快反镜发生偏转时,激光在CCD靶面成像也会相应移动,快反镜偏转量与靶面移动量之间呈线性关系。实验室快反镜采用上位机进行指令控制,由于上位机消息队列机制,无法准确获取上位机指令传输到下位机的时间间隔,无法测量精确的系统相位延迟时间,所以仅针对系统幅频特性进行分析。首先利用扫频法从0.01 Hz到700 Hz,以0.1×lgW为间隔输入给定频率的跟踪信号,记录快反镜跟踪输出幅值;然后利用细分傅里叶算法得到指定频率下的快反镜输出幅值。使用细分傅里叶算法,是因为CCD相机测到的成像光斑抖动量不仅包含快反镜的转动所引入偏移量,同时耦合了实验室空气湍流引入的低频抖动以及测量噪声、台面振动耦合进来的高频噪声,所以需要采用细分傅里叶算法获得抖动中指定频率信号的幅值。
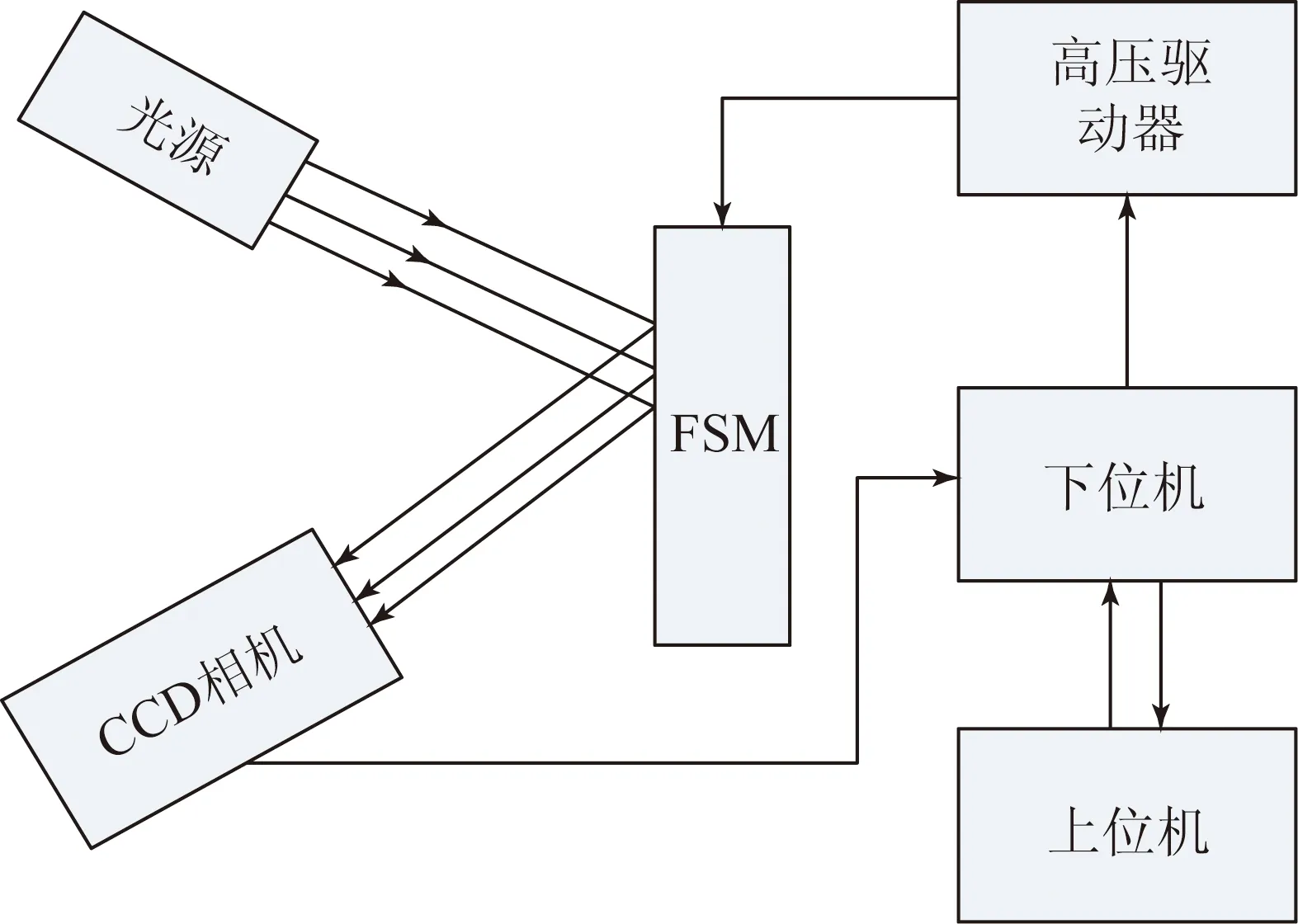
图3 快反镜测试系统示意图
利用测量得到的幅值数据带入模拟退火算法中,就可以得到待辨识的系统参数。模拟退火收敛曲线如图4所示,收敛RMS值为0.35,最优解为W=[460.278 4,0.170 3],收敛步长为38步。经过测量系统纯滞后实间延迟为3个采样周期,故得到辨识的系统传递函数G(s)如式(4)所示,图5所示为某一PID参数下闭环系统Bode图与辨识模型闭环Bode图的关系。

(4)
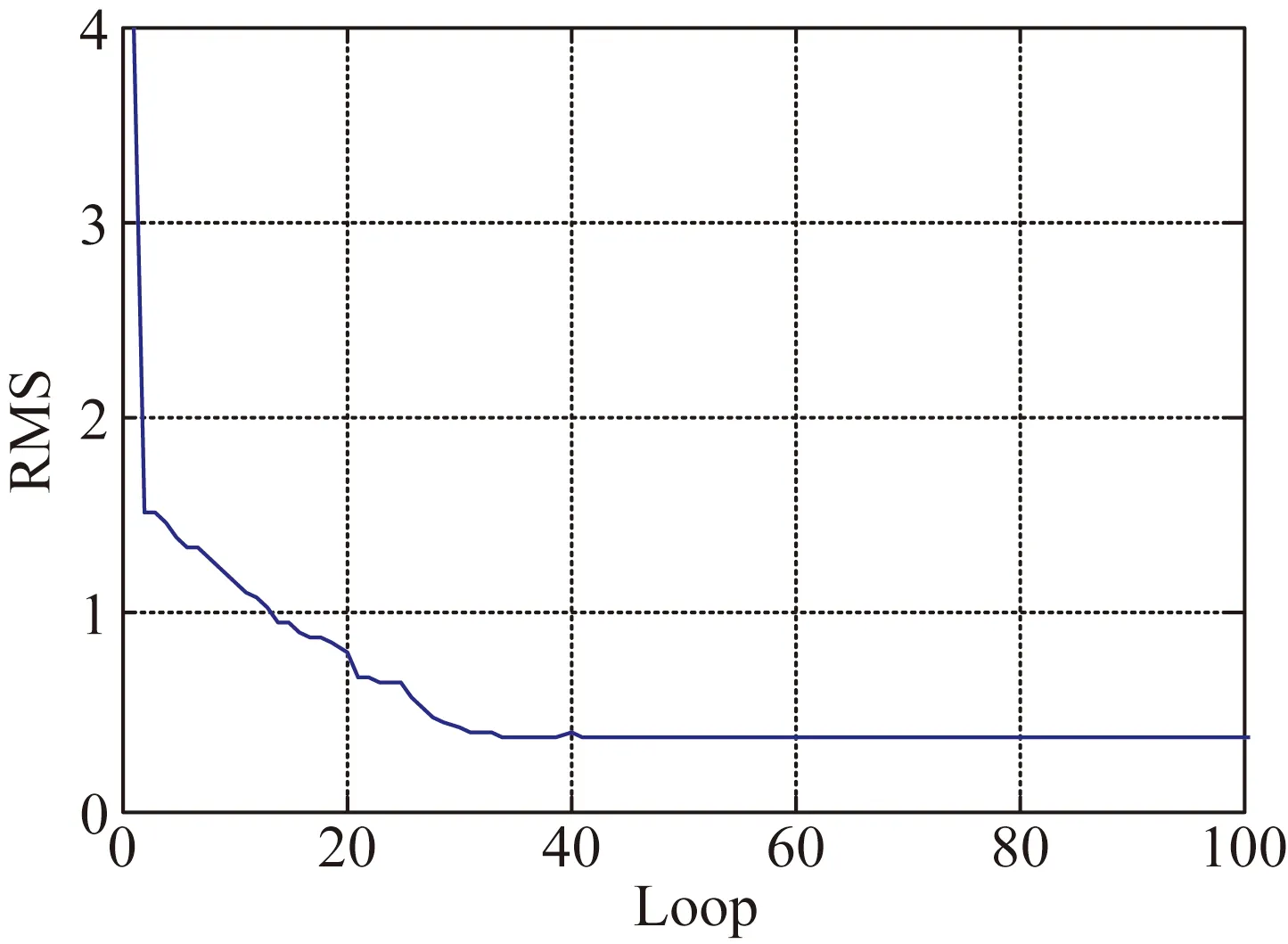
图4 模拟退火收敛曲线
图5中,虚线为测量得到的闭环系统幅频特性,实线为辨识模型闭环幅频特性,可以看出,辨识模型中低频段能够较好的逼近实际系统模型。
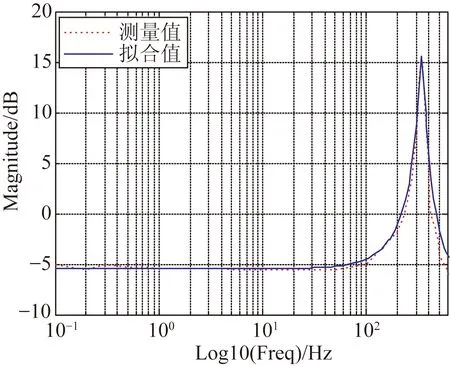
图5 辨识模型Bode图与实际系统Bode图
3.2辨识模型实验验证
为验证模型有效性,分别在不同PID参数下对快反镜系统和辨识模型进行阶跃响应测试,结果如图6所示。由图6可以看出,辨识模型的阶跃响应与实验测得的阶跃响应基本相同,辨识模型能够反映系统实际情况。实验测得阶跃响应上升阶段存在一个较大的尖峰,而辨识模型仿真得到的阶跃响应尖峰较小,这是因为辨识模型采用二阶近似,忽略高频机械谐振的影响。
获得系统近似模型后,利用数值仿真方法可以获得任意控制器下的系统闭环特性,下一节将针对系统PID参数整定困难的问题,提出利用模拟退火算法进行全局优化,获得满足需求的系统闭环特性。
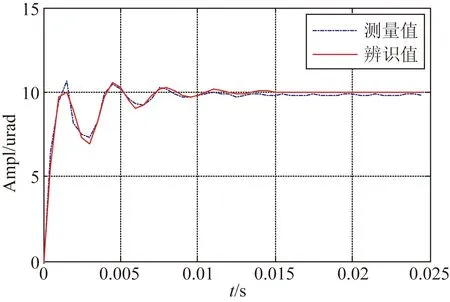
(a)P=0.35 I=400 D=0.000 09
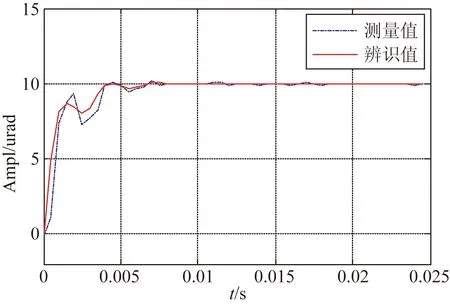
(b)P=0.4 I=400 D=0.000 09
4 控制算法优化
4.1PID参数整定
PID算法是工程上应用最为广泛的算法之一,当系统仅含1个或者2个极点时,PID控制能够有效的减小系统稳态误差和改善系统闭环性能,对于高阶系统可以采取降阶的方法获得近似二阶模型。虽然PID控制器具有结构简单,易于工程实现的优点,但是其参数整定困难,对工程调试经验依赖性很高,难以获得最优的控制效果[20]。常用的PID控制器传递函数为:

(5)
可以看出PID控制器类似一个带阻滤波器,其中带阻滤波器转折频率分别为1/τ和α/τ,通过设计合理的PID参数可以得到任意性能的带阻滤波器。利用模拟退火算法随机搜索,全局优化的特点,以PID参数作为寻优变量,系统期望闭环性能为目标函数,第三节辨识得到的模型作为系统模型,通过数值仿真的手段即可获得具有期望闭环特性的PID控制器。由前面分析得知,开环光轴高频抖动主要集中在100~300 Hz之间,故设计系统有效带宽为35 Hz,系统闭环带宽为70 Hz,此时系统既可以无失真的跟随光轴抖动,又可以有效抑制高频段测量噪声的影响。系统误差传递函数E(s)和闭环传递函数H(s)分别定义为[12]:
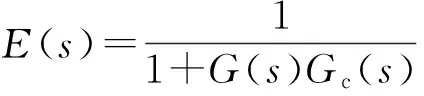

(6)
其中:G(s)为系统开环传递函数,Gc(s)为PID控制器,Kp、Ki、Kd为待优化参数。定义系统闭环带宽为闭环传递函数幅频特性曲线衰减至-3 dB处对应频率,系统有效带宽为误差传递函数幅频特性曲线-3 dB处对应频率。根据应用需求可以得到参数优化的限制条件:
(1)系统有效带宽为35 Hz;
(2)闭环带宽为70 Hz;
(3)闭环传函在200 Hz处幅频特性为-10 dB;
(4)误差传函在10 Hz处幅频特性为-10 dB。
定义模拟退火算法目标函数f(W):

(7)
其中:R0(i)为期望的幅值衰减,R(i)为仿真系统幅值衰减。待优化变量为W={Kp,Ki,Kd},取值{Wmin,Wmax}={[0.05,0.5],[50,1 000],[0.000 01,0.3]},温度衰减率为0.95,初始温度为100,终止温度为0.01,马尔科夫链长度为600,W初始值为[600,0.3,0.000 02]。
经过迭代得到系统最优解为W={ 0.139 1,279.031 8,6.194 8×10-5},收敛步长为1 500,RMS收敛至1.331 4×10-5。具有最优控制器的系统闭环特性曲线如图7所示,此时系统有效带宽35 Hz,闭环带宽70 Hz,100~300 Hz区间最小幅值衰减-5 dB,最大幅值衰减-12 dB,0.1 Hz 处抖动抑制比-33 dB,满足设计要求。
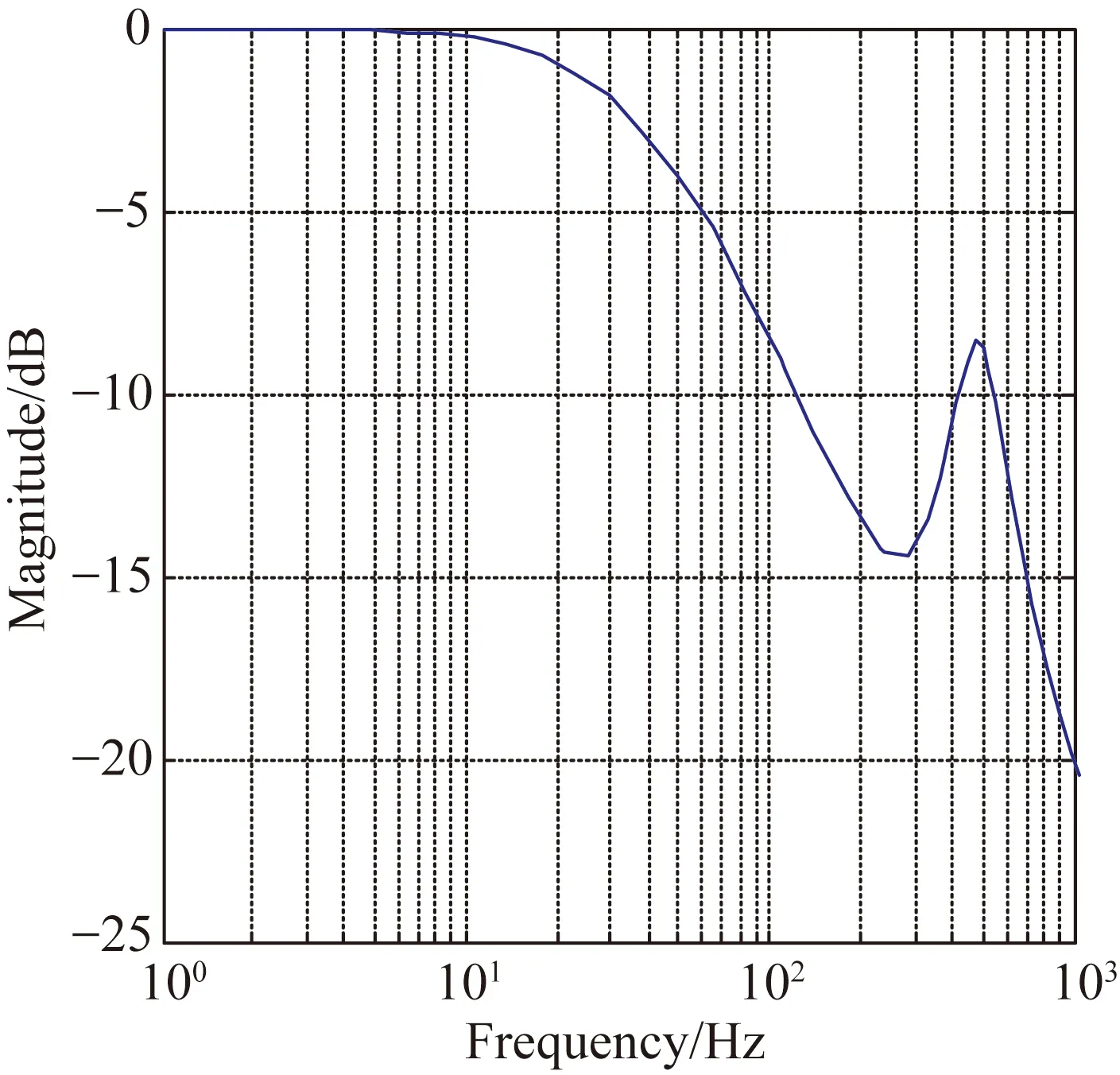
(a)系统闭环Bode图
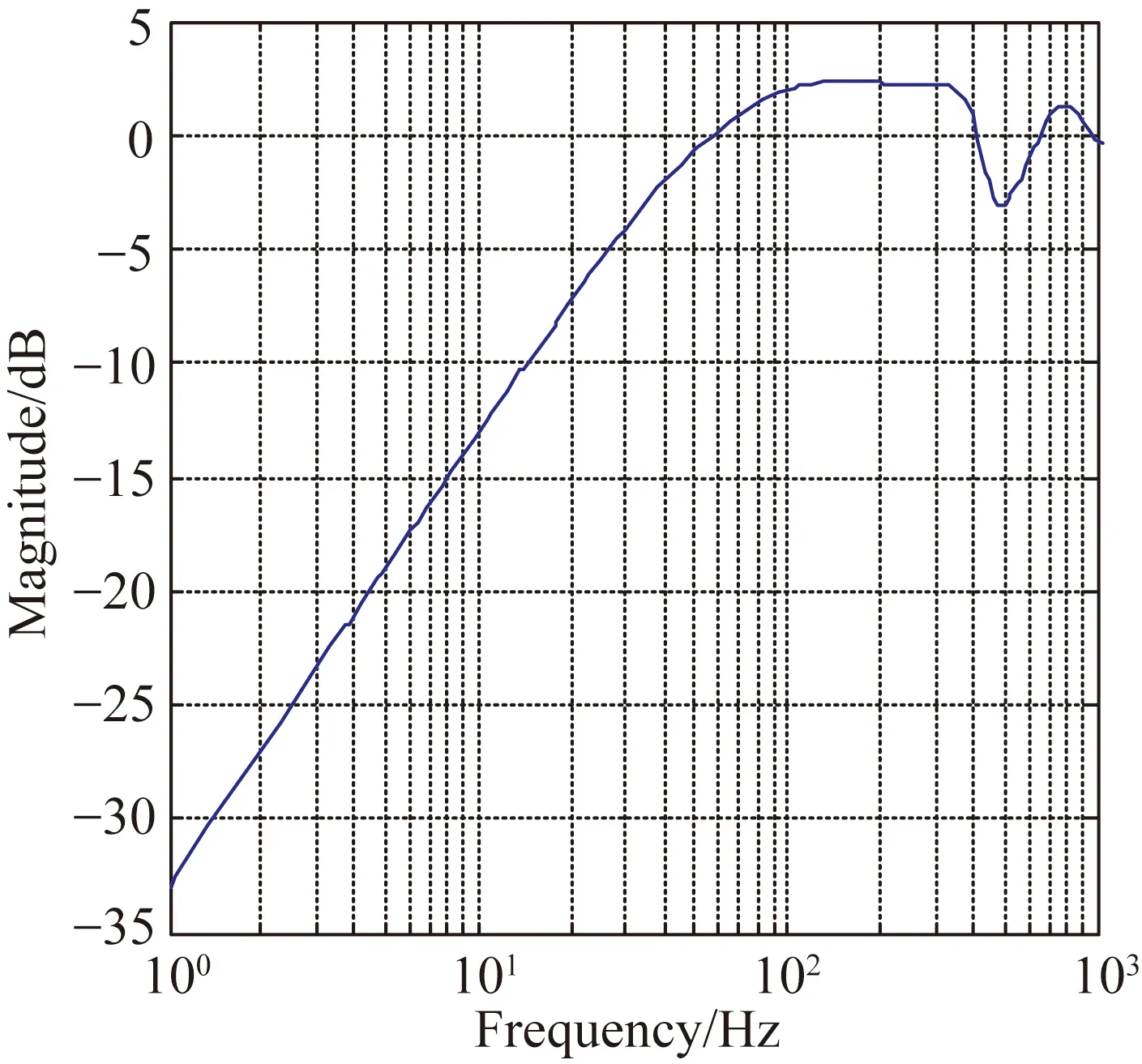
(b)系统误差Bode图
4.2实验验证
为验证控制器有效性,利用最优PID控制器对快反镜系统进行闭环控制,实验结果如图8所示。
图8中虚线所示为优化前系统闭环曲线,实线为优化后系统闭环曲线,优化前误差均方根为0.799 7 urad;优化后误差均方根为0.425 7 urad,可以看出在最优控制器作用下,系统不仅有效的跟踪低频信号,同时抑制测量噪声的影响,闭环精度提高47%。由于闭环带宽降低至70 Hz左右,高频信号激励下,压电作动器作用幅值变小,降低了快反镜的损耗,增加了设备使用寿命。
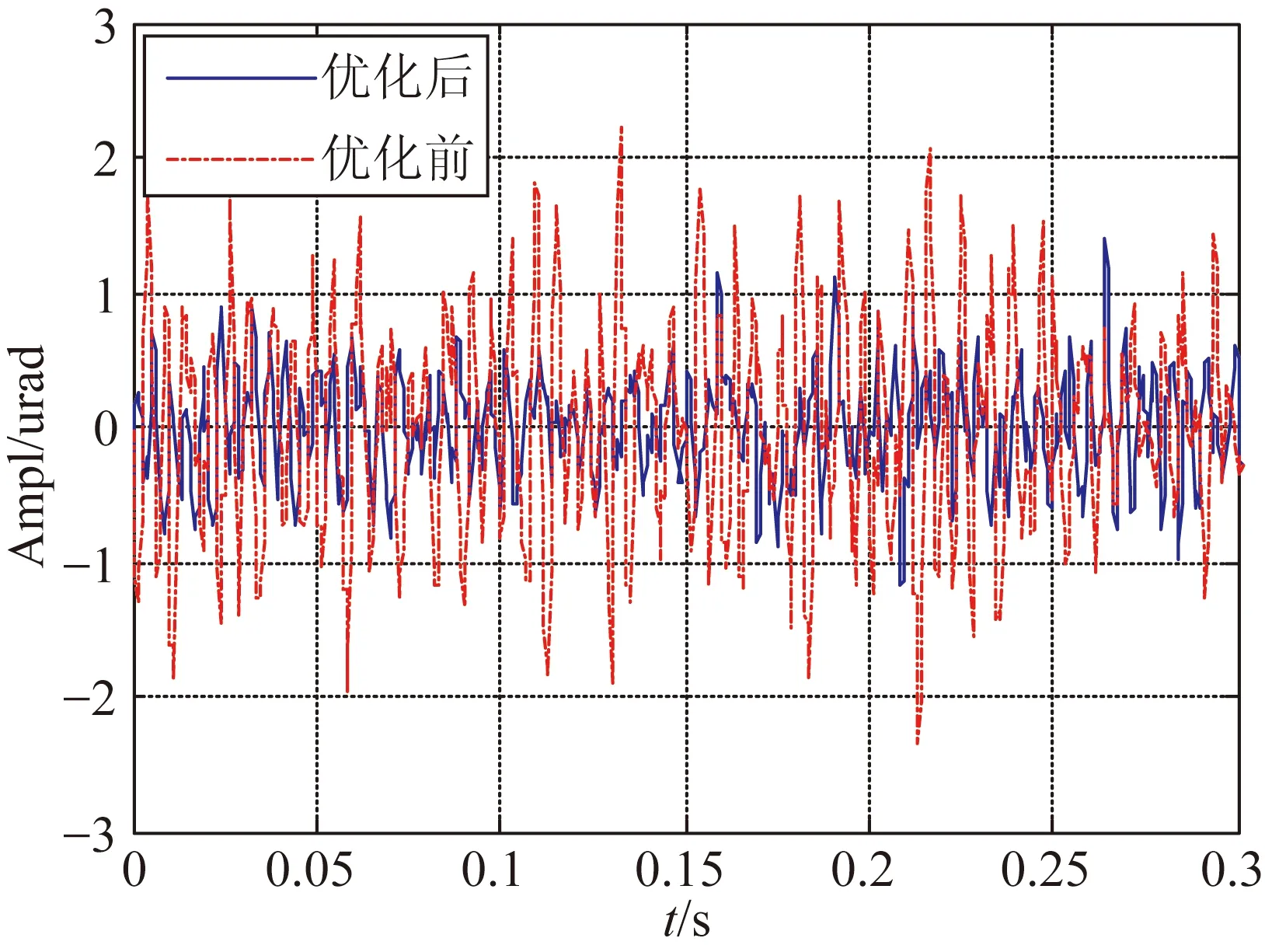
图8 优化前后系统闭环结果
5 结 论
本文将参数辨识与模拟退火算法相结合,提出一种离线全局优化的PID参数整定算法。利用Matlab仿真软件获得满足限制条件的PID控制器,并结合实验室压电快反镜系统进行验证。结果表明优化后系统有效带宽35 Hz,闭环带宽70 Hz,100~300 Hz区间最小幅值衰减-5 dB,最大幅值衰减-12 dbB,0.1 Hz处抖动抑制比-33 dB,闭环误差均方根由0.799 7 urad减小到0.425 7 urad,系统精度提高47%,系统具有良好的低频跟随性能和高频噪声抑制能力。由于忽略了高阶谐振的影响,辨识模型存在一定误差,如何补偿高阶误差影响是下一步需要解决的问题。
[1]彭树萍,于洪君,王伟国,等.新型快速反射镜伺服系统设计[J].红外与激光工程,2014,43(5):1610-1615.PENG SH P,YU H J,WANG W G,etal.. Design of servo for novel fast-steering mirror [J].InfraredandLaserEngineering,2014,43(5):1610-1615.(in Chinese)
[2]文江华,赵创社,姜粉娥,等.基于压电陶瓷的快速反射镜驱动与控制研究[J].兵工自动化,2015,34(8):59-64.
WEN J H,ZHAO CH SH,JIANG F E,etal.. Study of driving and controlling with fast steering mirror based on PZT [J].OrdnanceIndustryAutomation,2015, 34(8):59-64.(in Chinese)
[3]黑沫,鲁亚飞,张智永,等.基于动力学模型的快速反射镜设计[J].光学 精密工程,2013,21(1):53-61.HEI M,LU Y F,ZHANG ZH Y,etal.. Design of fast steering mirror based on dynamic model [J].Opt.PrecisionEng.,2013,21(1):53-61(in Chinese)
[4]徐新型,高云国,杨洪波,等.车载大口径刚性支撑式快速反射镜[J].光学 精密工程,2014,22(1):117-124.
XU X X,GAO Y G,YANG H B,etal.. Large-diameter fast steering mirror on rigid support technology for dynamic platform [J].Opt.PrecisionEng.,2014,22(1):117-124.(in Chinese)
[5]颜宏, 叶一东, 高清松,等. 两路120 W固体激光高光束质量相干合成[J]. 强激光与粒子束,2014, 26(8):111-115.
YAN H,YE Y D,GAO Q S,etal.. Coherent beam combination of two 120 W solid state lasers with high beam quality [J].HighPowerLaserandParticleBeams,2014, 26(8):111-115.(in Chinese)
[6]周子云,高云国,邵帅,等. 采用柔性铰链的快速反射镜设计[J]. 光学 精密工程,2014,22(6):1547-1554.ZHOU Z Y,GAO Y G,ZHAO SH,etal.. Design of fast steering mirror using flexible hinge [J].Opt.PrecisionEng.,2014,22(6):1547-1554.(in Chinese)
[7]袁刚,王代华,李世栋. 大角度压电式快速控制反射镜[J]. 光学 精密工程, 2015, 23(8):2258-2264.
YUAN G,WANG D H,LI SH D. Piezoelectric fast steering mirror with large excursion angle [J].Opt.PrecisionEng.,2015,23(8):2258-2264.(in Chinese)
[8]TANG T,MA J G,REN G. PID-I controller of charge coupled device-based tracking loop for fast-steering mirror [J].OpticalEngineering,2011,50(4):1-4.
[9]王强,陈科,傅承毓. 基于闭环特性的音圈电机驱动快速反射镜控制[J].光电工程, 2005,32(2):9-11.WANG Q,CHEN K,FU CH Y. Method for controlling fast-steering mirror drive by voice coil motor based on the closed-loop performance [J].Opto-ElectronicEngineering,2005,32(2):9-11.(in Chinese)
[10]丁科,黄永梅,马佳光,等.抑制光束抖动的快速反射镜复合控制[J].光学 精密工程,2011,19(9):1991-1998.
DING K,HUANG Y M,MA J G,etal.. Composite control of fast-steering-mirror for beam jitter [J].Opt.PrecisionEng.,2013,21(1):53-61.(in Chinese)
[11]田福庆,李克玉,王珏,等.压电驱动快速反射镜的自适应反演滑模控制[J].强激光与粒子束,2014, 26(1):59-63.
TIAN F Q,LI K Y,WANG J,etal.. Adaptive backstepping sliding mode control of fast steering mirror driven by piezoelectric actuator [J].HighPowerLaserandParticleBeams,2014, 26(1):59-63.(in Chinese)
[12]李新阳,姜文汉.自适应光学控制系统的有效带宽分析[J].光学学报,1997,12:1697-1702.
LI X Y,JIANG W H. Effective bandwidth analysis of adaptive optics control system [J].ActaOpticaSinica,1997,12:1697-1702.(in Chinese)
[13]杨东,毛耀,丁科,等.模型参考算法在快反镜中的应用[J].红外与激光工程,2013,42(10):2790-2795.
YANG D,MAO Y,DING K,etal.. Application of model reference adaptive algorithm in fast-steering mirrors [J].InfraredandLaserEngineering,2013,42(10):2790-2795.(in Chinese)
[14]刘永凯,张玉良,耿天文,等. 快反镜谐振特性测量系统设计与研究[J]. 仪表技术与传感器, 2015(11):62-64.
LIU Y K,ZHANG Y L,GENG T W,etal.. Design and study of measurement system for resonant characteristics of fast steering mirror [J].InstrumentTechniqueandSensor,2015(11):62-64.(in Chinese)
[15]王帅,陈涛,李洪文,等.光电跟踪伺服系统的频率特性测试与模型辨识[J].光学 精密工程,2009,17(1):78-84
WANG SH,CHEN T,LI H W,etal.. Frequency characteristic test and model identification for O-E tracking servo system [J].Opt.PrecisionEng.,2009,17(1):78-84.(in Chinese)
[16]胡浩军,马佳光,王强.快速控制反射镜系统中传递函数辨识[J].光电工程,2005,32(7):1-3.
HU H J,MA J G,WANG Q,etal.. Transfer function identification in a fast steering mirror system [J].Opto-ElectronicEngineering,2005,32(7):1-3.(in Chinese)
[17]王云. 电力系统动态参数辨识及暂态稳定紧急控制算法研究[D]. 杭州:浙江大学,2014.
WANG Y.ResearchonDynamicParameterIdentificationandTransientStabilityConstrainedEmergencyControl[D]. Hangzhou:Zhejiang University,2014.(in Chinese)
[18]唐宏波,朱玉川. 超磁致伸缩执行器磁滞模型的参数辨识[J]. 压电与声光,2015,37(5):863-866.
TANG H B,ZHU Y CH. Parameter identification of hysteresis model for giant magnetostrictive actuator based on jiles-atherton model [J].Piezoelectrics&Acoustooptics,2015,37(5):863-866.(in Chinese)
[19]李香平,张红阳.模拟退火算法原理及改进[J].软件导刊,2008,4:47-48.
LI X P,ZHANG H Y. Improvement of Simulated Annealing Algorithm [J].SoftwareGuide,2008,4:47-48.(in Chinese)
[20]何芝强. PID控制器参数整定方法及其应用研究[D]. 杭州:浙江大学,2005.
HE ZH Q.ResearchonPIDControllerParameterModifyandApplication[D]. Hangzhou:Zhejiang University,2005.(in Chinese)
龙柏君(1991-),男,重庆人,硕士,实习研究员,2013年、2015年于哈尔滨工业大学分别获得学士、硕士学位,主要从事光机控制方面的研究。E-mail:longbaijun199126@hotmail.com
欧龙(1984-),男,四川江油人,硕士,助理研究员,2005年于国防科技大学获得学士学位,2008年于中科院光电所获得硕士学位,主要从事快反镜控制电路设计与控制算法研究。E-mail:oulonghh@163.com
(版权所有未经许可不得转载)
Optimization of control strategy for FSM system by using simulated annealing algorithm
LONG Bai-jun1,2*,OU Long1,2,XIANG Ru-jian1,2,LI Guo-hui1,2
(1.InstituteofAppliedElectronics,ChinaAcademyofEngineeringPhysics,Mianyang621900,China;2.KeyLaboratoryofScienceandTechnologyonHighEnergyLaser,ChinaAcademyofEngineeringPhysics,Mianyang621900,China)*Correspondingauthor,E-mail:longbaijun199126@hotmail.com
Fast Steer Mirrors(FSMs) should possess different effective bandwidths and close bandwidths under different situations. So this paper establishes a system model based on a piezoelectric FSM control system, and optimizes the control strategy for the FSM system by analyzing the jitter of an optical axis. Firstly, close loop Bode figure of the system was measured, the simulated annealing algorithm was used to achieve the modulation transfer function of the system model. By combining simulated annealing algorithm and the identified model, an optimal PID controller to meet all kinds of applications was presented. Finally, the step response tests were used to verify the correctness of the identification model, and the closed-loop tests were taken to validate the effectiveness of the optimal controller. Experimental results indicate that the indentified model fits the FSM system very well in low-middle frequency stage, its step response is similar. The system controlled by the optimal controller has a closed-loop bandwidth of 70 Hz, an effective bandwidth of 35 Hz, and the tracking accuracy is improved by 47%, meeting the requirements of FSMs in the current environment. It concludes that the system has good low frequency tracking ability and high frequency interference rejection ability, showing high tracking precision and low device loss.
Fast Steer Mirror(FSM);simulated annealing algorithm;parameter identification;control strategy optimization
2016-05-06;
2016-06-07.
国家863高技术研究发展计划资助项目(No.2015AA8022006)
1004-924X(2016)09-2232-08
TH703;TH243
A
10.3788/OPE.20162409.2232
猜你喜欢
新能源科技(2022年9期)2022-11-20
成都信息工程大学学报(2022年4期)2022-11-18
中国交通信息化(2022年12期)2022-02-11
摄影之友(2020年12期)2020-12-23
环境技术(2020年1期)2020-03-06
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年1期)2016-11-07
软件(2016年3期)2016-05-16
电测与仪表(2016年17期)2016-04-11
城市轨道交通研究(2015年3期)2015-02-27
