
仿生偏振视觉定位定向机理与实验
2016-11-10 05:25王玉杰胡小平练军想张礼廉何晓峰
光学精密工程 2016年9期
王玉杰,胡小平,练军想,张礼廉, 何晓峰
(国防科技大学 机电工程与自动化学院,湖南 长沙 410073)
仿生偏振视觉定位定向机理与实验
王玉杰,胡小平*,练军想,张礼廉, 何晓峰
(国防科技大学 机电工程与自动化学院,湖南 长沙 410073)
为了有效利用全天域的偏振光信息,探究仿生偏振光导航机理,设计了偏振视觉传感器。介绍了基于四相机的偏振视觉传感器及其标定方法,推导了冗余配置下偏振态的最小二乘估计算法。分析了基于一阶瑞利散射模型的天空光偏振模式,将太阳方向矢量的最优估计问题转化为求解矩阵的特征向量问题,推导出了基于天空光偏振模式的定位定向算法。最后,设计了静态实验与转动实验,对理论分析结果进行了验证。实验结果显示:测量的天空光偏振模式与瑞利散射模型相一致, 并可从中成功提取太阳方向矢量。静态实验测量的太阳天顶角的最大误差约为0.4°,误差标准差为0.14°;基于1 h对天空偏振光的观测数据实现的定位误差为68.6 km。转动实验(转动两周)得到的最大定向误差约为0.5°,误差标准差为0.28°。研究结果揭示了生物利用偏振光导航的机理,为仿生偏振光导航的应用提供了理论依据。
偏振视觉传感器;仿生偏振导航;天空偏振模式;定位定向
1 引 言
自然界中的候鸟、昆虫等在迁徙或觅食过程中,能够利用它们独特的眼睛结构感知并利用光的偏振现象,生物的偏振视觉可以帮助它们进行导航定位和目标识别等[1-2]。太阳光经过大气粒子的散射能够产生稳定的偏振模式,准确地描述这种偏振模式是仿生偏振光导航的基础。1982年,Brines利用点源式偏振光测量仪获得了粗略的天空偏振光分布模式[3]。2001年,Wehner教授基于Rayleigh散射定律构建了一种标准大气偏振模型[4],随后J.Gal等学者通过对北极地区天空偏振模式的测量验证了Rayleigh散射模型的有效性[5]。2009年,晏磊等建立了天空偏振光分布的理论和实验模型,并进行了全天空偏振测量[6]。2013年,赵开春等设计了天空光偏振模式自动探测装置,用于获取天空光偏振模式信息并构建天空光偏振模型[7]。2014年,Y.Zhang 等设计了基于液晶相位延迟器的全天域偏振图像测量装置,实现了天空光偏振模式的快速测量。范晨等分析了天空偏振模式对仿生偏振光定向的影响机理,并进行了相关实验验证[8]。
在仿生偏振光导航应用中,Lambrinos等人仿照沙蚁感知偏振光的策略,设计了基于POL-神经元模型的偏振光罗盘,并成功应用于移动机器人导航[9]。2004年,NASA开始研究偏振光辅助下的飞行器视觉导航,拟用于火星表面的航空探测,以应对火星多磁极、低重力以及无线电导航困难的情况[10]。褚金奎等设计了三通道偏振光检测器,研究了仪器的标定技术和误差补偿方法[11-12]。卢鸿谦等从理论上分析了偏振光对组合导航系统的辅助作用[13]。杨中光和周军等研究了对偏振光传感器测角的误差因素与补偿方法[14]。刘俊教授也开展了天空偏振模式检测等工作,设计了偏振光测角传感器并探索了器件的微型化、阵列化设计[15]。褚金奎教授团队提出了基于偏振光和磁航向的定位算法,该方法根据两个偏振光传感器测量的偏振角来估算太阳的位置,而后结合磁传感器提供的航向角估计出载体的位置。该理论为解释候鸟在迁徙途中的定位机理提供了依据[16]。程珍等设计了由天空偏振角测量装置和OCTANS 惯导组成的定位系统,能够实时地获取相对可靠的地理位置[17]。
目前,国内外的偏振光导航侧重于利用单点式测量的传感器,容易受到环境干扰,鲁棒性较差。生物行为学的研究表明,沙蚁的偏振光导航依赖于全天域大气偏振模式,因此对这种导航机理进行探究具有重要意义[4]。本文旨在探究如何能有效利用全天域的偏振光信息,从而提高偏振光定位定向精度。首先系统介绍了一种基于四相机的偏振视觉传感器以及天空偏振态的解算方法,提出了基于特征向量的太阳方向矢量估计方法,推导了基于天空光偏振模式的定位定向算法,最后对理论分析结果进行了实验验证。
2 偏振视觉传感器
2.1系统构成与标定方法
本文设计的偏振视觉传感器主要由4个相机(GC1031CP, Smartek)、4个广角镜头(F1.4~F16, 焦距为3.5 mm)以及4个固定在CCD传感器前面的偏振片组成,如图1所示。4个相机的光轴朝向一致,分布在正方形的4个顶点上;与直线排列相比,正方形分布使得相机间重叠的视场最大,减小了相机间的视差。各相机的分辨率为1 034×778,视场角约为77°× 57.7°。4个偏振片绕通光轴按照0°,45°,90°,135°的方向安装,这种安装策略使得偏振态求解时所受的噪声影响最小。另外,冗余的配置增强了系统的可靠性,无论哪一个相机出现故障,系统仍可正常工作。
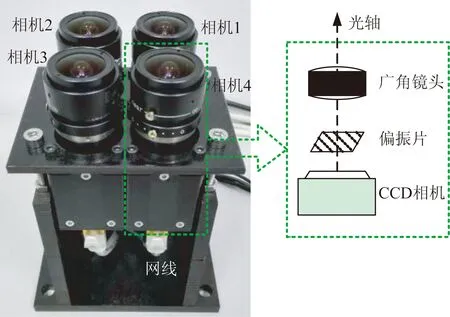
图1 偏振视觉传感器
偏振视觉传感器的标定主要包括以下3部分:(1)辐射计标定:将系统放在均匀的积分球光源下,测量各相机在不同强度光源照射下的响应,求解各相机的线性回归方程,获得其比例参数,从而补偿各相机间的非一致性误差。(2)偏振角标定:将系统固定在精密转台上,然后放置在标准偏振光源下,将转台旋转至不同的位置,将转台读数作为参考输入,建立优化目标函数,从而估计出偏振片安装角误差以进行补偿。(3)几何标定:建立各相机的内参数模型,以及相机间的几何约束模型,而后定义全局的待优化参数,通过观测标准的棋盘格标定板,使得重投影误差最小,从而补偿相机的安装误差以及内参数误差(系统的详细介绍及标定过程参见文献[18])。
在进行偏振态测量时,相机由同步控制器外触发进行采样,以确保曝光时间同步。所采集的数据由网线经交换机传送给计算机,通过上位机对4幅图像进行处理,就可得到偏振视觉传感器所拍摄视场内的天空偏振模式。本文的实验结果为事后离线处理。
2.2偏振态解算
对于某一方向的入射光,它的基本参数可以通过3次不相关的测量估计出来,因此需要将偏振片的光轴分布在几个特定的方向。对于某一入射光P,4个相机的响应可以描述为:

(1)
式中:fj为第j个相机的亮度值;Kj为第j个相机的增益系数,通过标定得到;I为入射光的光强;d为入射光的偏振度;φ为入射光的偏振方向与参考方向的夹角;φj是第j个偏振片的光轴方向与参考方向的夹角。其中I,d,φ为待求量。
该偏振视觉传感器属于冗余配置,在进行偏振态解算时利用最小二乘法来获得最优估计值。将式(1)改写为:
fj/Kj=Idcos 2φcos 2φj+Idsin 2φsin 2φj+I.
(2)
定义如下矩阵:



式(2)可以表示为:
DX=F,
(3)
则X的最小二乘估计由下式给出:

(4)
入射光的偏振角和偏振度分别为:

(5)
式中x1,x2,x3为向量X的各分量。
3 天空光偏振模式与定位定向机理
3.1天空光偏振模式
天空光偏振模式是太阳光经过粒子散射后产生的偏振光在天空中形成的特殊分布模式,具有显著的分布规律。晴朗的天气条件下,散射粒子主要由大气分子组成,其尺寸远小于光的波长,因此可以用一阶瑞利散射模型来描述晴朗天气下的大气散射过程,即散射光的E矢量(光波中的电振动矢量)方向垂直于散射面,如图2所示。一阶瑞利散射模型的详细描述参考文献[19]。

图2 一阶瑞利散射模型
图2中O表示观测者的位置,S表示太阳在天球上的方向,用天顶角γS和方位角αS来描述,其中天顶角与高度角互为余角;P代表观测方向,其天顶角和方位角分别为γ和α;φ为该入射光的偏振角,它可以由偏振视觉传感器直接测量得到。下面将推导如何从测得的天空光偏振模式提取出太阳方向矢量,从而用于载体的定位定向。首先定义如下右手直角坐标系:
相机坐标系(OcXcYcZc):选择1号相机作为参考基准,Xc轴和Yc轴分别沿CCD传感器的横向和纵向,Zc轴为相机的光轴。系统经过调平后,Zc轴指向天顶方向。
入射光坐标系(OiXiYiZi):Zi轴指向观测方向,Xi轴位于观测方向所在的竖直平面(OPP′)内,Yi轴与Xi轴和Zi轴构成右手直角坐标系。为避免图形过于复杂,图2中没有标出Yi轴。
图像中的每一个像素点(xp,yp) 都与某一方向的入射光相对应(γ,α),对于校正后的图像,其对应关系为:

(6)
式中:f为焦距,(cx,cy)T为光轴在图像中的投影坐标。
E矢量方向在相机坐标系中可以表示为:

(7)


(8)
根据瑞利散射模型,散射光的E矢量方向垂直于散射面,即E矢量与太阳方向矢量s相互垂直,即:
eTs=0.
(9)

ETs=0N×1.
(10)
实际测量中,由于误差的存在,太阳方向矢量s的最优估计可以表示为如下的优化问题:

(11)
为求解上述优化问题,定义方程:

(12)
式中λ是一个任意实数。将式(12)对s求导并令其等于零可得:

(13)
式(13)表明,s的最优估计为(EET)3×3的特征向量,λ为其对应的特征值。将式(13)代入式(12)可得:

(14)
因此,太阳方向矢量的最优估计为:矩阵EET的最小特征值所对应的特性向量。
3.2定位定向算法
偏振视觉定位的基本原理与航海中使用的天文定位方法类似。在惯性导航和无线电导航出现之前,简单实用的天文导航是舰船航海的唯一导航手段。天文定位的基本原理如图3所示。
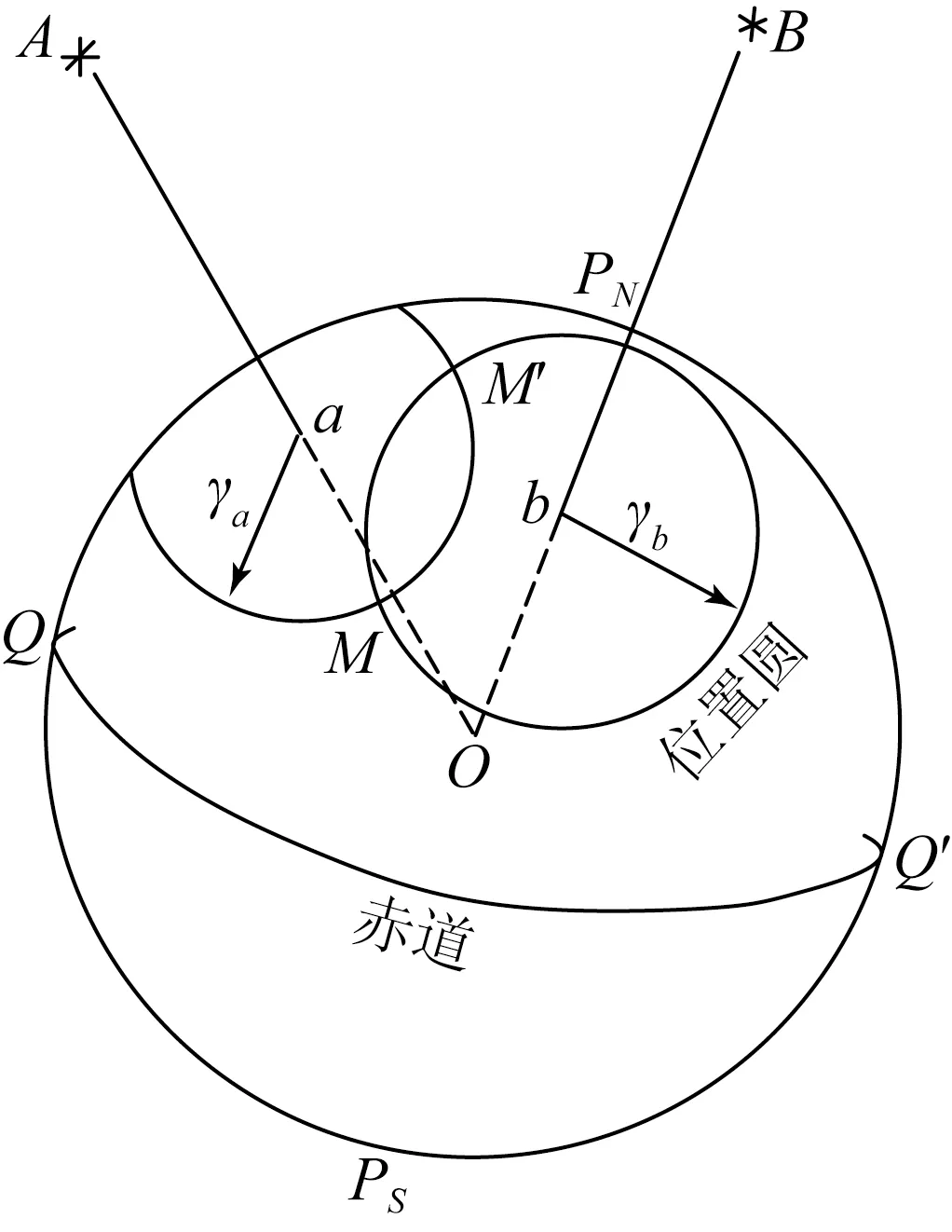
图3 天文定位原理图
假设A,B为两个已知的天体,天体A,B与地心O的连线与地球表面交于a,b两点,这两个交点称为天体星下点,可以通过天文年历得到。如果能测出载体到投影点的地心角γa和γb,则以a,b为极点,分别以γa,γb为半径,在球面上作出两个等高圆,它们交于M和M′两点。这两点中何者为真实位置,就是所谓的模糊度问题,通常可以根据载体的先验位置信息来判断,也可通过观测多颗星来判断,如文献[20]中建立的三视场天文定位定向系统。
在实际应用中,天体高度角的测量误差相当于等高圆半径的不确定度,双星定位的均方误差可以近似表示为:
(15)

上面所观测的两个天体也可以通过在不同时刻观测同一个天体来实现。通过测量天空偏振模式,按照式(11)提取出太阳的方向矢量s,则可以求得太阳的天顶角γS和太阳在载体系中的方位角αS,分别为:

(16)

(17)
这是一个典型的非线性最小二乘优化问题,可以通过迭代求解。
当估计出载体的位置以后,可以计算出太阳在当地地理坐标系中的方位角β,再结合式(16)即可解算出载体在地理系中的航向角ψ:
ψ=β-αS.
(18)
4 实验验证
在国防科大校园内分别进行了静态实验和转动实验。静态实验主要用于验证仿生偏振视觉定位机理,而转动实验则用于测试其定向精度。
4.1静态实验
将实验装置放在楼顶开阔地带,位置坐标为(E112.992°,N28.221°),时间为2015年12月16日。经过水平仪调平后,用偏振视觉传感器测量天空的偏振模式,测量时间为1 h,从13:37至14:37,天气晴朗,系统的采样频率设置为1 Hz。天空光偏振模式的测量结果及理论模型如图4所示。

图4 14:37时刻的天空光偏振模式
Fig.4Theoretical model and measurement result of skylight polarization pattern at 14:37
图4中为14:37时刻测量的天空光偏振模式,此时太阳天顶角约为60.7°,测量结果与瑞利散射模型符合得较好[19],从偏振角模式中可以清晰看出太阳子午线。偏振度模式呈带状分布,与理论模型相一致,视场内的最大偏振度约为40%,这与理论值相差较大,主要由多次散射的去偏振效应引起。利用式(11)可以从该偏振模式中提取出太阳方向矢量,结合式(16)求得太阳的天顶角γS和太阳在载体系中的方位角αS。整个实验过程中,太阳天顶角的变化曲线如图5所示。
图5表明测量的太阳天顶角与理论值相一致,最大误差约为0.4°,误差标准差为0.14°。基于这一小时内天空偏振光的测量结果,利用式(17)可以估计出载体的位置,定位结果为(E113.591°,N27.868°),定位误差为68.6 km。根据式(15)可以计算出理论定位误差:取太阳天顶角的测量误差εγA=εγB=0.14°,1 h内太阳方位角的变化量(αA-αB)=15°,则有εM=85.2 km,可见理论误差与实际的定位误差基本一致。文献[16]中基于偏振光和磁航向的定位精度约为100 km,文献[17]中在OCTANS惯导的辅助下利用偏振光定位实现了约50 km的定位精度,本文中的定位误差介于二者之间,误差的量级与它们基本一致。

图5 太阳天顶角的测量结果
在1 h的采样时间内,载体是静止水平放置的,太阳方位的变化同时引起了天空光偏振模式的变化。根据估计出的载体位置,可以计算出太阳在当地地理坐标系中的方位角,它相对于真北方向的方位角β从201.0°增加到215.5°;而根据测量的偏振模态可解算出太阳在载体系中的方位角αS,αS从20.9°增加到35.6°,整段时间内二者的变化规律相一致,如图6所示。根据式(18),二者之差即为载体的航向角ψ,结果如图6所示。
由于载体是静止的,因此测量的航向角应保持不变,图6中航向角的均值为180.1°,最大偏差约为0.4°,航向角的标准差为0.15°。结果表明,通过测量天空光偏振模式可以实现航向角的快速估计。
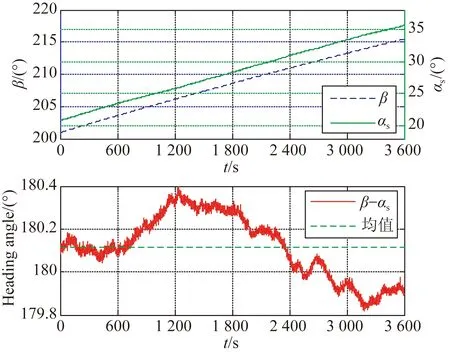
图6 载体航向角估计结果
4.2转动实验
在上述静态实验的基础上,为进一步验证航向角的估计精度,进行了转动测试。将偏振视觉传感器固定在精密多齿分度台上,该转台一周共有391格刻度,每格代表360/391=0.920 7°。实验地点及日期均与上述静态实验相同,天气晴朗。实验中将转台从0刻度依次增加30格至390位置,而后依次减小30格至0位置;在每个位置进行一次天空光偏振态测量,共计采样27次,相邻采样间的载体航向角相差±27.621 5°。采样时间从16:40至16:43,共计3 min。
图7给出了前两次采样中测量的天空光偏振模式,此时太阳天顶角约为80.4°,即太阳高度角略小于10°。图中的直线表征了太阳在载体系中的方位角αS,即太阳子午线。可见,偏振角模态沿着子午线呈反对称分布,且子午线处的偏振角为±90°,这与瑞利散射模型是一致的,即散射光的E矢量方向垂直于散射面(参考图2);而偏振度模态沿着子午线呈轴对称分布,视场内的偏振度达到了60%,远大于静态实验中的40%(对应的太阳高度角约为30°)。根据瑞利散射模型,最大的偏振度发生在距离太阳90°的区域,而朝向太阳(或背离太阳)方向的偏振度最小,呈现出如图7中所示的带状分布。因此,太阳高度角越小,天顶方向的偏振度越大。
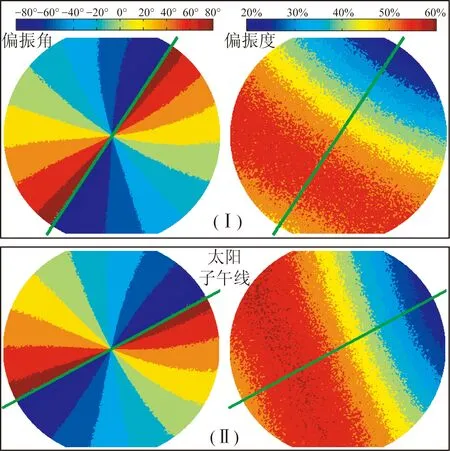
图7 天空光偏振模式的前两次测量结果
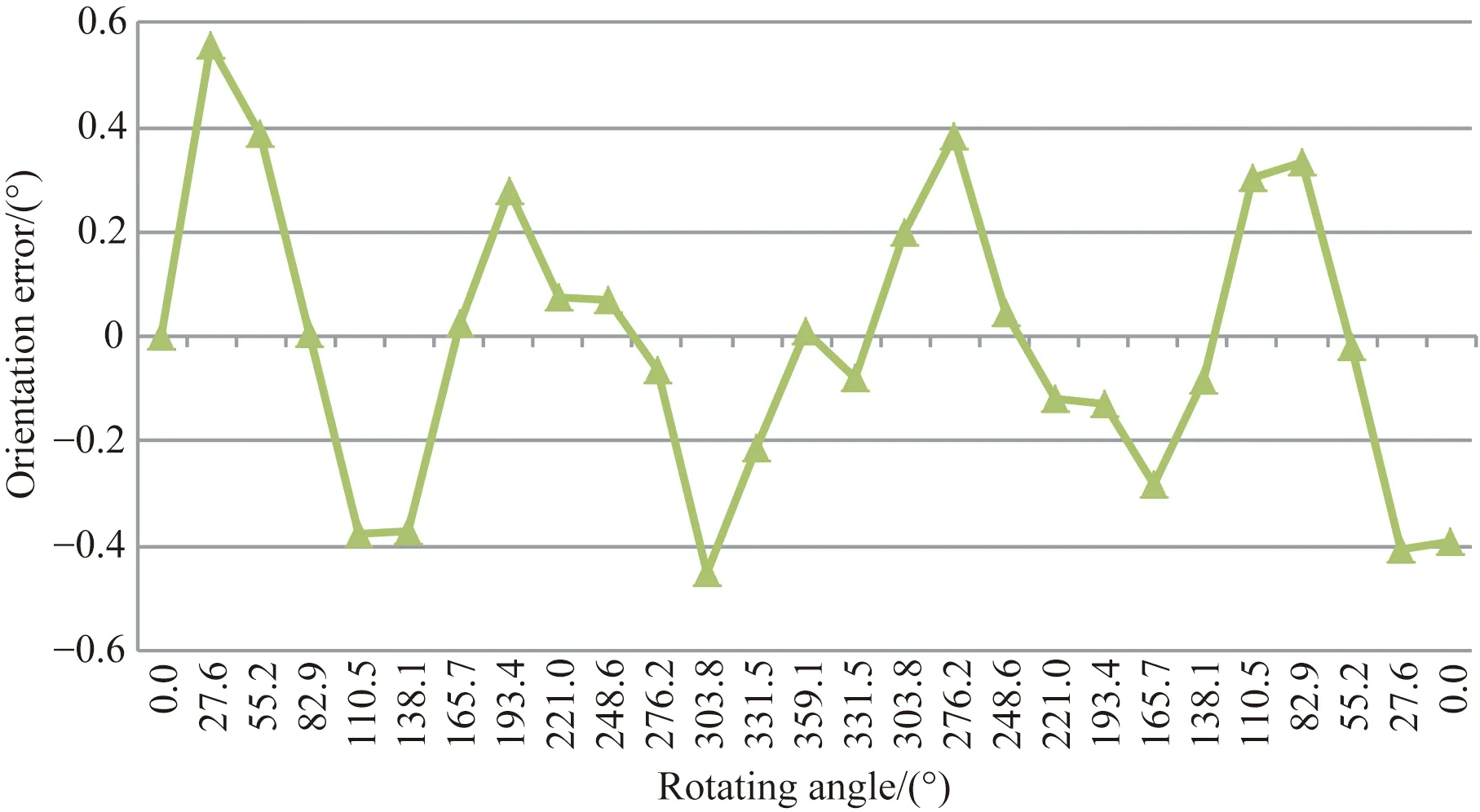
图8 转动过程中的定向误差
对比(Ⅰ)和(Ⅱ)两次采样结果可知,测得的天空光偏振模式随着转台的转动而转动。转台的转动过程如图8中的横轴所示,从0位置转至359.08° 然后回到 0位置。以转台的0位置作为参考,则输出的航向角应与转台转动的角度相一致,其差值即为定向误差。整个转动实验过程中的定向误差如图8所示。结果表明,在转动2周的过程中,最大的定向误差约为0.5°,误差标准差为0.28°,该指标可用来评估系统的定向精度。
5 结 论
本文设计了一种基于4相机的仿生偏振视觉传感器,推导了冗余配置下偏振态的最小二乘估计算法。分析了基于一阶瑞利散射模型的天空光偏振模式,并在此基础上提出了基于特征向量的太阳方向矢量最优估计方法,推导了基于天空光偏振模式的定位定向算法。实验结果表明:测量的天空光偏振模态与瑞利散射模型相一致,并从中成功提取出了太阳方向矢量。静态实验中测量的太阳天顶角的最大误差约为0.4°,误差标准差为0.14°,基于1 h内对天空偏振光的观测结果实现的定位误差为68.6 km。在转动两周的测试中,最大的定向误差约为0.5°,误差标准差为0.28°。本文揭示了生物利用偏振光进行导航的机理,设计的偏振视觉传感器能够实时测量天空光偏振模式,既可用于构建更加精确的大气偏振模型,亦可用于载体的自主导航。
[1]MUHEIM R, PHILLIPS J, ÅKESSON S. Polarized light cues underlie compass calibration in migratory songbirds [J].Science, 2006, 313:837-839.
[2]KARMAN S, DIAH S, GEBESHUBER I. Bio-inspired polarized skylight-based navigation sensors: a review [J].Sensors, 2012, 12(11):14232-14261.
[3]BRINES M L, GOULD J L. Skylight polarization patterns and animal orientation [J].JournalofExperimentalBiology, 1982, 96(1):69-91.
[4]WEHNER R. Polarization vision-a uniform sensory capacity? [J].JournalofExperimentalBiology, 2001, 204(14):2589-2596.
[5]GAL J, HORVATH G, BENNO V,etal.. Polarization patterns of the summer sky and its neutral points measured by full-sky imaging polarimetry in finnish lapland north of the arctic circle [J].ProceedingsoftheRoyalSocietyAMathematicalPhysical&EngineeringSciences, 2001, 457:1385-1399.
[6]晏磊, 关桂霞, 陈家斌,等.基于天空偏振光分布模式的仿生导航定向机理初探[J]. 北京大学学报:自然科学版, 2009, 45(4):616-620.
YAN L, GUAN G X, CHEN J B,etal.. The bionic orientation mechanism in the skylight polarization pattern [J].ActaScientiarumNaturaliumUniversitatisPekinensis, 2009, 45(4):616-620.(in Chinese)
[7]赵开春, 卢皓, 尤政. 天空光偏振模式自动探测装置[J]. 光学 精密工程, 2013, 21(2):239-245.ZHAO K CH, LU H, YOU ZH. Automatic detection system of skylight polarized pattern [J].Opt.PrecisionEng., 2013, 21(2):239-245.(in Chinese)[8]范晨, 胡小平, 何晓峰, 等. 天空偏振模式对仿生偏振光定向的影响及实验[J]. 光学 精密工程, 2015, 23(9):2429-2437.FAN CH, HU X P, HE X F,etal.. Influence of skylight polarization pattern on bionic polarized orientation and corresponding experiments [J].Opt.PrecisionEng., 2015, 23(9):2429-2437.(in Chinese)
[9]LAMBRINOS D, MÖLLER R, LABHART T,etal.. A mobile robot employing insect strategies for navigation [J].RoboticsandAutonomousSystems, 2000, 30(1-2):39-64.
[10]THAKOOR S, MOROOKIAN J M, CHAHL J,etal.. BEES: Exploring mars with bioinspired technologies [J].Computer, 2004, 37(9):38-47.
[11]CHU J, ZHAO K, ZHANG Q,etal.. Construction and performance test of a novel polarization sensor for navigation [J].Sensors&ActuatorsA:Physical, 2008, 148(1):75-82.
[12]褚金奎, 王志文, 张英杰, 等. 多方向金属光栅偏振器及在偏振导航中的应用[J]. 光学 精密工程, 2012, 20(10):2237-2244.
CHU J K, WANG ZH W, ZHANG Y J,etal.. Multi-orientated wire-grid polarizer and its application to polarization navigation [J].Opt.PrecisionEng., 2012, 20(10):2237-2244.(in Chinese)
[13]卢鸿谦, 尹航, 黄显林. 偏振光/地磁/GPS/SINS组合导航方法[J]. 宇航学报, 2007, 28(4):897-902.
LU H Q, YIN H, HUANG X L. Polarized-light/geomagnetism/GPS/SINS integrated navigation [J].JournalofAstronautics, 2007, 28(4):897-902.(in Chinese)
[14]杨中光, 周军, 黄河, 等. 偏振导航传感器测角误差分析与补偿[J]. 光学 精密工程, 2014, 22(6):1424-1429.
YANG ZH G, ZHOU J, HUANG H,etal.. Analysis and compensation of angle errors of polarization navigation sensors [J].Opt.PrecisionEng., 2014, 22(6):1424-1429.(in Chinese)
[15]任建斌, 刘俊, 唐军, 等. 利用大气偏振模式确定太阳和太阳子午线空间位置法[J]. 光子学报, 2015(7):113-118.
REN J B, LIU J, TANG J,etal.. Skylight polarization pattern-based approach to the location of the sun and solar meridian [J].ActaPhotonicaSinica, 2015(7):113-118.(in Chinese)
[16]WANG Y, CHU J, ZHANG R,etal.. A novel autonomous real-time position method based on polarized light and geomagnetic field [J].ScientificReports, 2015, 5:9725.
[17]程珍, 梅涛, 梁华为,等.一种偏振光自定位方法的分析及实现[J]. 光电工程, 2015(6):33-38.
CHEN ZH, MEI T, LIANG H W,etal.. Analysis and implementation of the skylight polarization autonomous positioning method [J].Opto-ElectronicEngineering, 2015(6):33-38.(in Chinese)
[18]FAN C, HU X, LIAN J,etal.. Design and calibration of a novel camera-based bio-inspired polarization navigation sensor [J].IEEESensorsJournal, 2016, 16(10):3640-3648.
[19]WANG Y, HU X, LIAN J,etal.. Design of a device for sky light polarization measurements [J].Sensors, 2014, 14(8):14916-14931.
[20]吴量, 王建立, 王昊京. 基于最小损失函数的三视场天文定位定向[J]. 光学 精密工程, 2015, 23(3):904-912.
WU L, WANG J L, WANG H J. Three FOV celestial positioning and orientation with minimum loss function [J].Opt.PrecisionEng., 2015, 23(3):904-912.(in Chinese)

王玉杰(1988-),男,河南新乡人,博士研究生,2010年于哈尔滨工业大学获得学士学位,主要从事仿生导航、视觉导航等方面的研究。E-mail: yjwang@nudt.edu.cn
导师简介:

胡小平(1960-),男,四川泸州人,教授,博士生导师,专业技术少将,现为总装备部惯性技术专家组副组长,IEEE高级会员,主要从事导航制导与控制、仿生导航等领域的研究。E-mail: xphu@nudt.edu.cn
(版权所有未经许可不得转载)
Mechanisms of bionic positioning and orientation based on polarization vision and corresponding experiments
WANG Yu-jie, HU Xiao-ping*, LIAN Jun-xiang, ZHANG Li-lian, HE Xiao-feng(CollegeofMechatronicEngineeringandAutomation,NationalUniversityofDefenseTechnology,Changsha410073,China)*Correspondingauthor,E-mail:xphu@nudt.edu.cn
To make effectively use of the polarized light information of the whole horizon and to explore the mechanism of bionic polarized light navigation, a polarization vision sensor was designed. The polarization vision sensor based on four cameras was introduced and its calibration method was given. Then, the optimal estimation of the polarization state was derived based on least square algorithm. The skylight polarization pattern was analyzed based on the first order Rayleigh scattering model,the estimation of sun direction vector was translated into an optimization problem of finding the minimum eigenvector, and the positioning and orientation algorithm was derived. Finally, the theoretical analysis was verified by a static experiment and a rotation experiment. The results show that the measured skylight polarization pattern is consistent with the Rayleigh scattering model and the solar vector can be extracted successfully from it. In the static experiment, the maximum error of the solar zenith angle is about 0.4 °with the standard deviation of 0.14 °and the positioning error is about 68.6 km based on the observation data within one hour. In rotation experiment, the maximum orientation error is about 0.5° with the standard deviation of 0.28 °. This study reveals the mechanism of bionic navigation based on polarized light, and provides a theoretical basis for its applications to the bionic polarized light navigation.
polarization vision sensor; bionic polarization navigation; skylight polarization pattern; positioning and orientation
2016-04-11;
2016-06-11.
国家自然科学基金资助项目(No.61573371,No.61503403);国防科技大学科研计划资助项目(No.JC14-03-04)
1004-924X(2016)09-2109-08
V249.32;O436.3
A
10.3788/OPE.20162409.2109
猜你喜欢
物理学报(2022年23期)2022-12-14
中国惯性技术学报(2020年2期)2020-07-24
空间电子技术(2020年5期)2020-03-11
成都信息工程大学学报(2019年4期)2019-11-04
电子制作(2019年12期)2019-07-16
现代职业教育·中职中专(2018年11期)2018-06-11
学苑创造·A版(2017年4期)2017-05-13
光学精密工程(2016年3期)2016-11-07
小天使·一年级语数英综合(2015年8期)2015-07-06
小朋友·快乐手工(2015年1期)2015-03-13
