水下机器人深度控制研究
2016-11-07 22:00袁彬魏国亮董团阳
软件导刊 2016年9期
袁彬++魏国亮++董团阳
摘要:实现PID控制器在水下机器人中的应用。提出水下机器人六自由度空间运动模型;借助SIMULINK平台,设计PID控制器对水下机器人深度控制进行仿真;将控制算法写入实际控制系统中,并在仿真控制参数的基础上微调,实现水下机器人深度控制。
关键词:水下机器人;PID控制器;SIMULINK
DOIDOI:10.11907/rjdk.161638
中图分类号:TP319
文献标识码:A文章编号文章编号:16727800(2016)009012502
作者简介作者简介:袁彬(1990-),男,河北石家庄人,上海理工大学光电信息与计算机工程学院硕士研究生,研究方向为水下机器人姿态控制;魏国亮(1973-),男,上海人,上海理工大学光电信息与计算机工程学院教授,研究方向为水下机器人姿态控制算法;董团阳(1991-),男,陕西西安人,上海理工大学光电信息与计算机工程学院硕士研究生,研究方向为水下机器人操作系统。
0引言
海洋中蕴含着丰富的资源,如石油、天然气、各种稀有金属等。据估计,海洋中的资源储藏量是陆地的几十到几百倍。海洋资源的开发和利用对人类未来的生存与发展具有十分重要的意义。水下机器人由于机动灵活,能够在深海中长时间工作而日益成为人类开发利用海洋资源的重要工具。因此,水下机器人的研究具有重要价值。
从水下机器人与水面支持设备(母船或平台)间联系方式的不同,可以将水下机器人分为两大类:一类是有缆水下机器人,习惯上称为水下遥控运载体(Remotely Operated Vehicle),简称ROV。ROV是由母船通过电缆向其提供动力和进行遥控;另一类是无缆水下机器人,称为水下自主式无人运载体(Automatic Underwater Vehicle),简称AUV。AUV自带能源,依靠自身控制完成任务。有缆机器人都是遥控式,按其运动方式分为拖曳式、(海底)移动式和浮游(自航)式3种。而无缆水下机器人只能是自治式的,按规划的航线执行任务。ROV研究将是未来水下机器人行业的发展方向。
水下机器人的运动控制是其完成指定任务的前提和保障,是水下机器人的关键技术之一。本文提出便于直接进行控制和仿真的六自由度通用模型。以水下机器人深度控制为研究目标,设计PID控制器。首先,在SIMULINK仿真[1,2]环境下对水下机器人深度控制进行模拟仿真,然后将控制算法应用到实际系统中实现水下机器人深度控制。
1水下机器人的数学模型
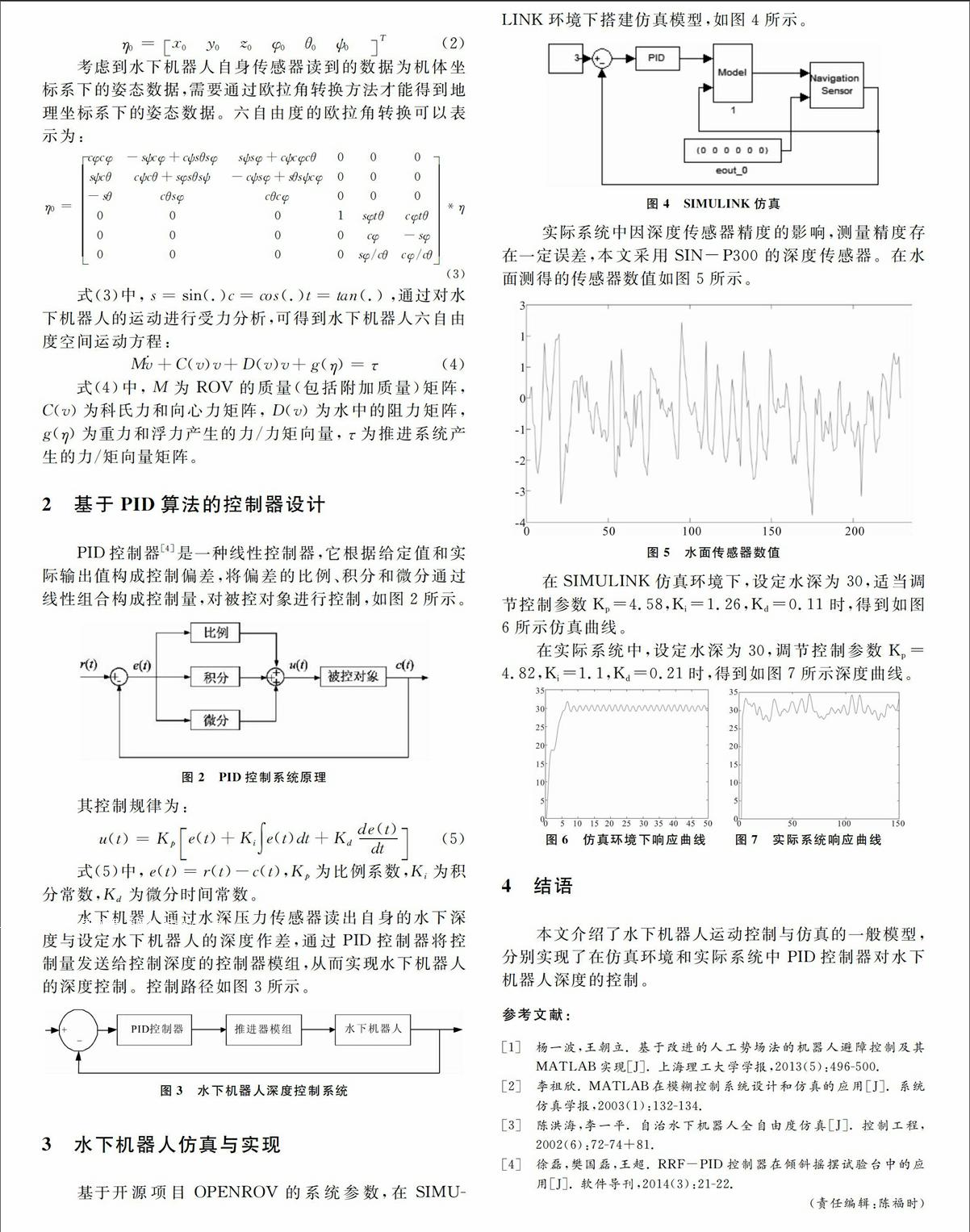
任何运动数学模型都是基于一定的坐标系,首先确定水下机器人运动的坐标系。本文采用国际水池会议(ITTC)推荐的体系。坐标系分为机体坐标系和运动坐标系,两种坐标系之间通过欧拉公式进行转换。为了分析水下机器人的六自由度运动,考虑使用方便,将艇体重心与坐标系的原点重合。六自由度坐标系[3]如图1所示。
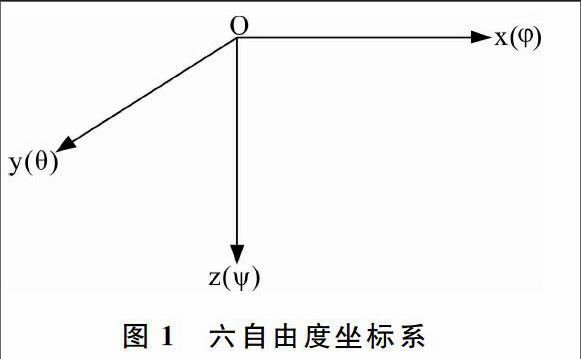
根据水下机器人的运动学模型,图1为水下机器人的六自由度运动坐标系,其中X轴为艇艏方向、Y轴为横轴、Z轴为垂直轴、绕X轴转动的横滚角φ、绕Y轴转动的俯仰角θ、绕Z轴转动的偏航角ψ。 符号表示如表1所示。
定义基于机体坐标系的六自由度扩展坐标为:
η=xyzφθψT(1)
定义基于地理坐标系的六自由度扩展坐标为: