八数码问题解法效率比较及改进研究
2016-11-07 18:00付宏杰王雪莹周健周孙静朱
软件导刊 2016年9期
关键词:算法
付宏杰王雪莹周健周孙静朱珠张俊余

摘要:八数码问题是人工智能中的一个典型问题,目前解决八数码问题的搜索求解策略主要有深度优先搜索、宽度优先搜索、启发式A*算法。对这些算法进行研究,重点对A*算法进行适当改进,使用曼哈顿距离对估价函数进行优化。对使用这些算法解决八数码问题的效率进行比较,从步数、时间、结点数、外显率等各参数,通过具体的实验数据分析,进一步验证各算法的特性。
关键词:八数码;深度优先搜索;宽度优先搜索;A*算法;曼哈顿距离
DOIDOI:10.11907/rjdk.161867
中图分类号:TP312
文献标识码:A文章编号文章编号:16727800(2016)009004105
基金项目基金项目:
作者简介作者简介:付宏杰(1973-),女,吉林公主岭人,博士,吉林工程技术师范学院信息工程学院副教授,研究方向为人工智能、群体智能、机器学习。
1问题描述
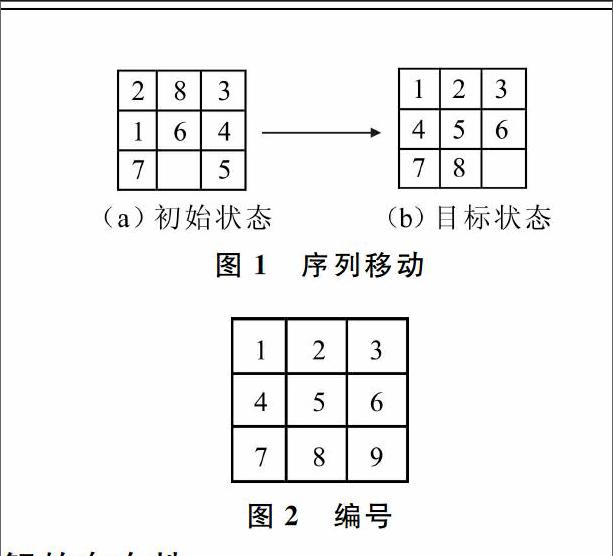
八数码问题就是在一个大小为3×3的九宫格上,放置8块编号为1~8的木块,九宫格中有一个空格,周围(上下左右)的木块可以和空格交换位置。对于问题,给定一个初始状态(如图1(a)初始状态),目标状态(如图1(b)目标状态)是期望达到1~8顺序排列的序列,并且空格在右下角,问题的实质就是寻找一个合法的移动序列。
2问题分析和模型表示
2.1模型建立
对于棋格,每个位置给定一个编号,从左上角开始顺序编号(见图2),对于任意的状态,记为p = s[0]s[1]s[2]s[3]s[4]s[5]s[6]s[7]s[8],图1初始状态中的状态可以表示为 p=2 8 3 1 6 4 7 0 5,图2目标状态中的状态可以表示为 p = 1 2 3 4 5 6 7 8 0。
2.2分析解的存在性
不是每一个给定的初始状态都存在解,在分析之前,引入线性代数逆序和逆序数的概念:在一个排列中,如果一对数的前后位置和大小顺序相反,即前面的数大于后面的数,那么它们就成为一个逆序;排列中逆序的总数就成为这个排列的逆序数。例如,排列p=2 8 3 1 6 4 7 0 5的逆序数为1+6+1+0+2+0+1=11(不可解)。
使用线性代数理论可以论证,对于任意目标状态,只有初始状态的逆序数和目标状态的逆序数的奇偶性相同才有解(逆序数计算不包括0的逆序数)。例如p=1 2 3 4 5 6 7 0 8的逆序数为0,与p的逆序数奇偶性相同,因此是可解状态。
3搜索策略
搜索算法本质上是一棵将初始节点作为根节点的四叉树。从初始节点开始,以空白格向4个方向的移动作为分支。求解的过程就是寻找一条从根节点到目标结点的路径的过程。
为了方便论述,取目标状态为:p=1、2、3、4、5、6、7、8、0,本文用上、右、下、左分别表示空格的向上、向右、向下、向左4种操作。
3.1深度优先搜索算法(Depth-First-Search)
深度优先搜索策略是扩展当前结点,生成的子节点总是置于扩展栈的前端,这样搜索向纵深方向发展。
3.1.1算法策略
①将起始结点S加入栈中,如果此结点是目标结点,则得到解;②如果栈为空,则无解,失败退出,否则继续执行步骤Ⅲ;③将栈顶元素(记作结点N)从栈中取出;④如果结点N的深度等于最大深度,则转向步骤Ⅱ;⑤扩展结点N的所有结点,产生其全部的后继结点,并压入栈;⑥如果后继结点中有任一结点为目标结点,则求得解,否则转向步骤Ⅱ。
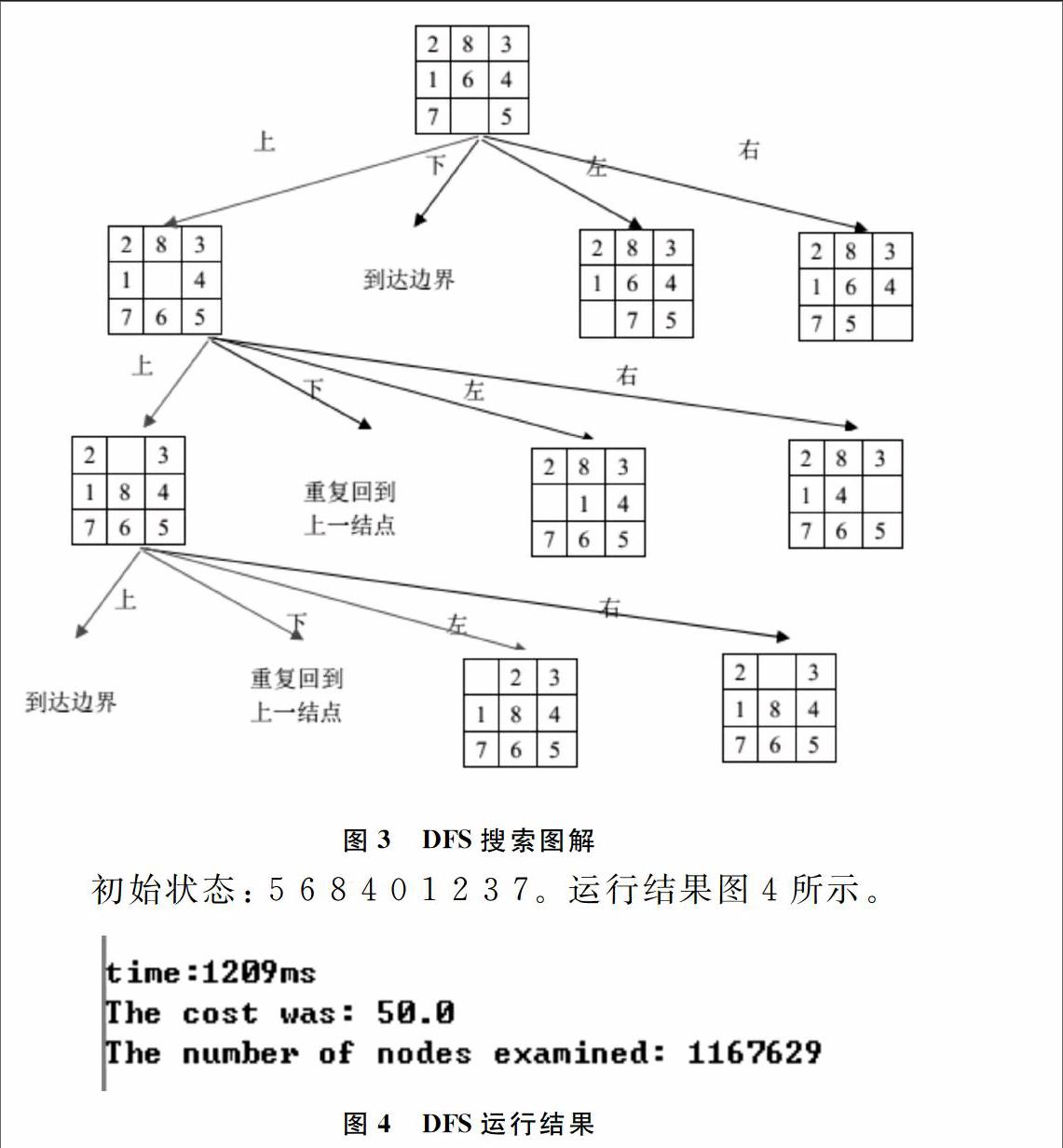
3.1.2搜索图解
搜索图解如图3所示。
3.1.3算法优缺点分析
深度优先算法在解决八数码问题时有一个致命缺点,就是必须设置一个深度界限,否则,搜索会一直沿着纵深方向发展,会一直无法搜索到解路径。
即使加了限制条件,搜索到了解路径,解路径也不一定是最优解路径。
缺点:如果目标节点不在搜索进入的分支上,而该分支又是一个无穷分支,就得不到解,因此该算法是不完备的。
优点:如果目标节点在搜索进入的分支上,则可以较快得到解。
3.2宽度优先搜索算法(Breadth-First-Search)
宽度优先算法将扩展结点置于扩展队列的末端,使得搜索向横向发展。
3.2.1算法策略
①将起始结点放入队列中,如果该起始结点为一目标结点,则得到解;②如果队列为空,则无解,失败退出,否则继续步骤Ⅲ;③将第一个结点(记作结点N)放入队列中,并将它放入已扩展结点的队列中;④扩展结点N,如果没有后继结点,则转向步骤Ⅱ;⑤将N的所有后继结点放到队列末端,并提供从这些后继结点回到结点N的指针;⑥如果N的任一后继结点是个目标结点,则找到一个解(反向追踪得到从目标结点到起始结点的路径),成功退出,否则转向步骤Ⅱ。
宽度优先搜索对于八数码问题的解决情况,相较于深度优先搜索好,对于解决步数在20~30步的初始状态,可以在300~500ms内解决。
3.2.2搜索图解
搜索图解如图5所示。
3.2.3算法优缺点分析
宽度优先搜索,在搜索过程中,遵循一层一层往下搜索的搜索策略,它是一个完备的算法,找到的解一定是最优解。
缺点:当目标节点距离初始节点较远时会产生许多无用的节点,搜索效率低,只能适用于到达目标结点步数较少的情况,如果步数超过15步,运行时间太长,则不再起作用。
优点:只要问题有解,则总可以得到解,而且是最短路径的解。
3.3A*算法
A*算法的基本思想与广度优先算法相同,但是在扩展出一个结点后,要计算它的估价函数,并根据估价函数对待扩展的结点排序,从而保证每次扩展的结点都是估价函数最小的结点。
3.3.1算法思想
A*算法是一种常用的启发式搜索算法。在A*算法中,一个结点位置的好坏用估价函数来对它进行评估:
f(n)=g(n)+h(n)
这里,f(n)是估价函数,g(n)是起点到终点的最短路径值(也称为最小耗费或最小代价),h(n)是n到目标的最短路经的启发值。由于这个f(n)其实是无法预先知道的,因而实际上使用的是如下估价函数:
f(n)=g(n)+h(n)
其中,g(n)是从初始结点到节点n的实际代价,h(n)是从结点n到目标结点的最佳路径的估计代价。在这里主要是h(n)体现了搜索的启发信息,因为g(n)是已知的。用f(n)作为f(n)的近似,也即用g(n)代替g(n),h(n)代替h(n)。这样必须满足两个条件:①g(n)≥g(n)(大多数情况下都是满足的,可以不用考虑),且f必须保持单调递增;②h必须小于等于实际的从当前节点到达目标节点的最小耗费h(n)≤h(n)。第二点特别重要,可以证明应用这样的估价函数可以找到最短路径。
估价函数中,主要是计算h,对于不同的问题,h有不同的含义。这里的h(n)代表的是当前结点状态与目标结点状态相比没有到位的棋子数,是最简单的估价函数。
3.3.2算法策略
①建立一个队列,计算初始结点的估价函数f,并将初始结点入队,设置队列头和尾指针;②取出队列头(队列头指针所指)的结点,如果该结点是目标结点,则输出路径,程序结束。否则对结点进行扩展;③检查扩展出的新结点是否与队列中的结点重复,若与不能再扩展的结点重复,则将它抛弃,若新结点与待扩展的结点重复,则比较两个结点的估价函数中g的大小,保留较小g值的结点。跳至Ⅴ;④如果扩展出的新结点与队列中的结点不重复,则按照其估价函数f的大小将它插入队列中的头结点之后待扩展结点的适当位置,使它们按从小到大的顺序排列,最后更新队列尾指针;⑤如果队列头的结点还可以扩展,直接返回步骤②,否则将队列头指针指向下一结点,再返回步骤②。
3.3.3搜索图解
搜索图解如图7所示。
3.3.4算法优缺点分析
优点:A*算法在绝大多数的情况下,在性能方面都远远优与DFS和BFS。算法的主要运行性能,取决于估价函数f的选取。
缺点:由于算法本身的特点,因此根据估价函数找到的解路径不一定是最优解路径。
初始状态: 5 6 8 4 0 1 2 3 7。运行结果图8所示。
4算法改进
4.1状态表示方法压缩
有许多表示方法,比如一个3*3的八数码盘可以压缩成一个int值表示,但不适用于格子大于9的问题(如十五谜问题)。如果对空间要求很高,则还可以再压缩。本文采用整数(int)表示的方法。
表示方法如下:由于int的大小是32位(范围是[-2147483648-2147483648]),取一个int的低9位。为了方便寻找空格的位置,int的个位用来放空格的位置(1-9)。而前8位,按照行从上到下,列从左到右的顺序依次记录对应位置上的数字。
4.2哈希函数去重
高效避免访问同一个状态,最直接的方法是记录每一个状态访问与否,然后在衍生状态时不衍生那些已经访问的状态。基本思想是,给每个状态标记一个flag,若该状态flag = true则不衍生,若为false则衍生并修改flag为true。
每一次移动产生新状态时,先判断它是否已在两个链表中,若存在,则不衍生;若不存在,将其放入活链表。对于被衍生的那个状态,放入死链表。
为了记录每一个状态是否被访问过,需要有足够的空间。八数码问题一共有9!,这个数字并不是很大,采用哈希函数的方法,使复杂度减为O(1)。
4.3估价函数改进
通过找出不在位置的棋格个数形成的简单估价函数,不足以描述该结点到目标节点的路径长度。因此本文采用一种更为科学合理的距离函数,来描述两个状态结点之间的差距。设距离函数为h2(n),其函数值为当前结点状态不在位置的棋格,到它目标结点需要移动的距离:
h2(n)=|x-x0|+|y-y0|
使用此函数,对于A*算法的估价函数进行改进,能够取得比较明显的改进效果。
5效率比较
5.1概念
首先给出几个用来进行效率比价的变量:①步数(L):从初始节点到达目标的路径长度;②时间(T):搜索程序运行的时间,单位毫秒(ms);③结点数(N):整个过程中生成的节点总数(不包括初始节点);④外显率(P):搜索工程中,从初始节点向目标节点进行搜索的区域的宽度。
P=LN;P∈(0,1]
5.2实验数据分析
数据说明:①环境为Windows系统,语言为Java,使用控制台命令输出算法时间;②目标状态 1 2 3 4 5 6 7 8 9 0;③由于运行时间受系统影响很大,具有一定的随机性,因而每个状态执行3次,取中位数作为最终结果时间;④“长度”为该初始状态对应的最短路径的长度。实验数据及结论如表1~表5、图9~图12所示。
(1)八数码问题解路径长度比较。
(2)八数码问题解决时间比较。
(4)八数码问题外显率比较。
5.3研究结论
通过研究,可得结论如下:①DFS的解路径长度趋于搜索深度界限(本文界限是30),搜索效率受深度影响很大,并且搜索结点冗余多、速度慢;②BFS找到的一定是最优解,但是在算法效率上,虽然比DFS好,却远远不如A*算法,同时BFS在搜索深度较深时,产生的冗余结点较多;③A*算法在效率上相对最优,时间和空间上都比DFS和BFS更优,但缺点是,找到的解不一定是最优解;④改进的A*算法在时间复杂度和效率上都更优,空间利用率(外显率)与A*算法差距不大。总体而言,改进的算法取得了较好效果。
参考文献参考文献:
[1]蔡自兴.徐光.人工智能及其应用[M].北京:清华大学出版社,1996.
[2]唐朝舜.董玉德.八数码的启发式搜索算法及实现[J].安徽职业技术学院学报,2004,3(3):912.
[3]陶阳.VS2008环境下八数码问题的BFS算法设计与实现[J].电脑知识与技术,2009(26):1417.
[4]张信一.黎燕.基于A*算法的八数码问题的程序求解[J].现代计算机,2003,5(14):1418.
[5]贺计文,宋承祥,刘弘.基于遗传算法的八数码问题的设计及实现[J].计算机技术与发展,2010(3):2023.
[6]姚全珠,赵双瑞.基于状态空间搜索的ETL过程优化[J].计算机工程与应用,2007(26):4446.
责任编辑(责任编辑:孙娟)
猜你喜欢
成都信息工程大学学报(2019年4期)2019-11-04
阅读与作文(英语初中版)(2019年8期)2019-08-27
小学生学习指导(低年级)(2018年11期)2018-12-03
传感器与微系统(2018年7期)2018-08-29
传感器与微系统(2018年7期)2018-08-29
西安工程大学学报(2016年6期)2017-01-15
现代防御技术(2016年1期)2016-06-01
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2015年24期)2015-04-09
华东理工大学学报(自然科学版)(2014年6期)2014-02-27