搭载于 ROV 的深海半自动沉积物保压取样器设计
2016-11-04 12:35:48庄广胶
舰船科学技术 2016年9期
庄广胶,王 彪,吴 超,葛 彤
(1. 上海交通大学 船舶海洋与建筑工程学院,上海 200240;2. 上海海洋大学 深渊科学与技术研究中心,上海 201306)
搭载于 ROV 的深海半自动沉积物保压取样器设计
庄广胶1,王彪2,吴超1,葛彤1
(1. 上海交通大学 船舶海洋与建筑工程学院,上海 200240;2. 上海海洋大学 深渊科学与技术研究中心,上海 201306)
随着 ROV(Remotely Operated Vehicles)在大洋科考活动中应用越来越成熟,为了运用 ROV 取得更丰富的样品,需要针对 ROV 的特点研发专用的取样工具。考虑 ROV 搭载的可行性和深海沉积物样本的采集及保存需要保持取样原点压力的需求,设计一套 ROV 可以搭载使用的深海半自动沉积物保压取样器,研究其深海半自动密封、体积置换及压力损失补偿技术 3 项基本技术,并对以上技术进行计算分析和实验验证,结果表明该技术方案具有较好的原位保压能力。
深海;保压;体积置换;压力补偿;取样器;ROV
0 引 言
深海生物圈的微生物量占全球总量的 90%。从深海检测到的微生物与其他环境的微生物有明显差异,具有独特代谢途径、信号传导和防御机制,是研究早期生命过程与地球环境演化的活化石,具有无可替代的科学价值[1-3]。高压是深海区别于其他生态系统的一个基本环境参数。深海微生物适应了高压环境,具有耐压性甚至嗜压性。海洋沉积物几乎覆盖所有的海床表面,占地球表面的 65% 以上。厚度从几厘米到几千米不等,平均厚度 500 m,处在平均 3 800 m 水深下[4]。在沉积物中的有机物等营养物质是在海水形成并沉淀到海底,沉积物中的物质传递以扩散作用为主,有明显的化学梯度。因此,对沉积物的研究一方面能够揭示由于过去的沉积作用下的物质积累,另一方面能够揭示微生物作用下的物质转化[5]。传统的电视抓斗取样器或拖网等获得的深海沉积物,由于在回收至水面的过程中,海水的压力不断减少,导致沉积物中的深海微生物死亡,从而失去了研究的价值,因此研发海水原位沉积物保压取样器的需求已经非常迫切。ROV具有在水下工作时间长、作业能力强,无作业人员人身危险等优势,再加上光纤技术的发展,脐带缆中的光纤可以使操纵员及科学家实时地观察海底的图像[6],因此 ROV 已经成为大洋科考不可或缺的利器。研发ROV 可以搭载使用的深海沉积物保压取样器意味着可以在大洋底部灵活的、有选择的采集沉积物样品,从而获得其他手段难以获得的样品。
1 取样器结构和工作原理
1.1常见沉积物保压取样器结构
目前常规的深海沉积物保压取样器一般为重力式,即由水面母船释放,设备依靠自身重量将取样桶插入沉积物,然后通过吊放设备的吊索将取样筒回收至保压舱内[7-8]。常规的深海沉积物保压取样器的重量在 1 t 以上,根本不适合 ROV 搭载。
1.2ROV 搭载的保压取样器结构
相对于常规的沉积物保压取样器,ROV 搭载的保压取样器有以下几个特点:重量要轻,可以利用 ROV的机械手及供电、控制接口,同时作为一个沉积物保压取样器,具备沉积物的采集功能和保压存储功能。
如图1所示,本取样器包括:取样筒、保压筒、导引器、封口器、蓄能器、体积置换器及主框架 3 部件,其中体积置换器位于主框架背后。

图1 深海半自动沉积物保压取样器系统组成Fig. 1 Configuration of the deep-ocean semi-automatic sediment pressure sampler
取样筒由 ROV 机械手抓持,目前大部分调查作业的 ROV 都会配置一个七功能的伺服机械手,可以实现精细且灵活的操作,机械手力量通常都在 100 kgf 以上,完全可以胜任取样工作。取样筒为空心筒状结构,内部有推塞,机械手上的触发油缸推动推塞可以将沉积物样品推出。保压筒通过铰链固定在主框架上,可以通过机械手操作,与主框架呈一定的角度。保压筒筒口为内螺纹,封口器可以将螺塞旋入保压筒筒口,螺塞的前部为密封圈,实现保压筒的密封。保压筒上有数个接口,分别与蓄能器、体积置换器及取样品阀口接通。导引器安装在保压筒筒口,防止沉积物附着在筒口密封位置,造成密封失效。
1.3本取样器工作原理
取样器的工作过程如图2所示。取样前,保压筒的筒口安装导引器,保压筒筒口外翻,封口器位于高点,准备工作一般在 ROV 入水前在母船的甲板配置完成;在找到合适的取样点后 ROV 的机械手从 ROV 的取样篮中抓取取样筒,插入沉积物中取得沉积物,将取样筒的端口对准导引口,机械手推动推塞将样品转移至保压筒内;然后机械手拔除导引器;机械手操作封口器下行;水面控制台操作封口器,将保压筒封口密闭。
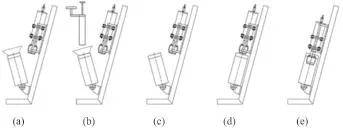
图2 取样器工作过程示意图Fig. 2 Diagrammatic sketch of the sampler's working procedure
1.4保压系统组成
本取样器保压系统涉及到的组成部分如图3所示。下水准备时蓄能器充高压氮气压力值达到作业深度压力的 80%,蓄能器的活塞处于最左侧,体积置换器的活塞也复位到最左侧。在 ROV 到达作业海底时,蓄能器内的氮气会因为高压收缩,其压力会与外界海水压力一致。机械手将沉积物放置到保压筒之后,封口器开始封口。封口器在旋入的过程中,保压筒内的样品和海水由于几乎没有可压缩性,导致封口器旋入时所排开的海水必须转移到体积置换器中,且封口器旋紧时体积置换器的活塞恰好到达最右端。在取样器上升至海面的过程中,取样筒外部的压力逐渐降低,由于筒内外的压差会使得筒体膨胀导致筒内压力降低,此时蓄能器内部的氮气就会膨胀,弥补压力损失。
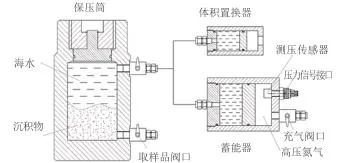
图3 保压系统组成图Fig. 3 Configuration of the pressure retention system
2 保压性能计算
2.1保压筒内压变形计算
根据压力容器在内压作用下的径向和轴向变形量便可计算保压筒的理论体积变化量。
径向位移为:

轴向位移为:

式中:P 为内压,d和D 分别为内外径;r 为应力分析处半径;L 为筒体原长;E 为筒体材料弹性模量;μ 为泊松比。
保压筒体积变化量为:

2.2气体压力补偿计算
为了控制保压筒内的压力衰减,必须有额外的压力控制装置。常规的做法是给压力筒连接一个蓄能器,利用蓄能器内气体体积弹性模量小、体积膨胀后压力下降小的特点减缓保压筒内的压力损失,该方法为被动式的压力补偿装置,可以运用理想气体状态方程进行计算。

式中:P1为取样点处压力值,35 MPa;V1为取样点处高压氮气室体积;T1为取样点处海水温度,275 K;P2为返回甲板时保压筒内压力值;V2为返回甲板时高压氮气室体积;T2为回收至甲板温度,293 K。
通过计算,取样器取样完毕回到甲板时,保压筒内的压力不仅不会衰减,反而会因为周围环境温度的上升,导致高压氮气温度上升,从而使氮气室压力上升导致保压筒压力上升,在甲板温度 293 K(22 ℃)时,该压力值会上升到 37 MPa。计算表明:
1)气体压力补偿技术可有效控制保压筒内压力的衰减;
2)温度变化对保压筒内的压力值影响较大。
2.3体积置换器设计
本保压筒端盖采用的是轴向密封,在端盖进入保压筒的过程中,端盖所排开的海水没有排泄的出口,海水的弹性模量很大,可压缩性能非常有限,升高的保压筒内压会导致端盖无法进入保压筒形成有效的密封,因此在端盖进入保压筒的过程中需要有排水接口将多余的海水导走。
根据分析的体积置换器作用,体积置换器的置换体积为保压筒端盖与保压筒形成有效密封开始到保压筒端盖运行到最终密封位置后所排开的海水体积。由于保压筒端盖与保压筒之间采用轴向密封,轴向密封的特点就是对端盖是否精确到达最终位置无严格要求,因此体积置换器的置换体积取值可略小,防止保压筒端盖到达旋紧位置时体积置换器还有余量,导致压力补偿器需要补偿的体积变大引起保压效果变差。
无论是德国行政诉讼的调解制度,还是我国现有的调解制度,若要制度性、系统性地进行构建,都是一项重大的系统工程,但对于构建调解制度中的几个关键问题,应当结合我国当下时代立法背景予以明确回应。
3 实验研究
该取样器进行海试需要协调 ROV与科考船等装备,暂时没有合适的实地使用机会,因此先行开展了实验室试验。在实验室测试阶段并不具备完全模拟海底的使用环境,而且本实验研究的重点是取样器的保压效果,因此本实验重点验证图2(d)-(e) ,即保压筒封口后的保压效果。
具体的实验方法是将取样器按照图4的封口器封口之前的状态放入深海压力环境模拟器,采用最大模拟压力 120 MPa、入口直径 760 mm 深海压力环境模拟器,将封口器的控制信号引出到深海压力环境模拟器外面,深海压力环境模拟器封闭加压到 35 MPa 后,从深海环境模拟器外侧控制封口器将保压筒密封,然后将深海压力环境模拟器压力卸掉,取出取样器,从测压口测量保压筒内的压力。
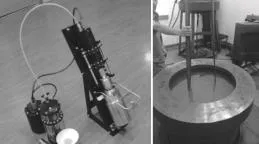
图4 压力试验Fig. 4 Pressure test
经实验测试,取样器在 35 MPa 压力点将保压筒密闭后,从深海压力环境模拟器中取出后,压力值为33.54 MPa(环境温度 15 ℃)。由于深海压力环境模拟器内的温度与环境温度几乎一致,因此不存在温度引起的压力变化,而保压筒内的压力衰减值大于理论计算值 34.76 MPa。造成实际保压压力值大于理论计算保压压力的原因为以下几点:
1)理论计算只计算了保压筒的膨胀变形,没有将体积置换器和蓄能器的计算进去;
2)密封圈部分在取样点并不承受内外压差,但在保压状态确承受 35 MPa 内外压差,会产生较大的挤压变形;
3)连接保压筒、蓄能器和体积置换器之间的高压软管在巨大的内外压差下也会产生膨胀变形,从而导致保压效果下降。
实验的第二部分是研究温度对保压效果的影响。将取样器放置于水槽中,通过向水中添加冰块获得低于环境温度的水温;采用加热设备获得高于环境温度的水温,从而调整置于水中的取样器的温度,取样器的保压压力随温度的变化情况如表1所示。
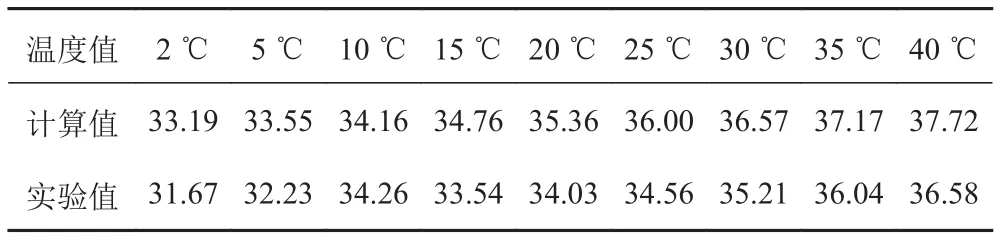
表1 取样器保压压力随温度变化情况Tab. 1 The sampler's pressure changed with temperature
从表格中的数据可看出,实验值的变化趋势基本与计算值一致。但实验值与计算值有一定的差别,原因最主要的是温度的控制,水槽的温度调节系统采用的是简易的措施,很难长时间维持在稳定的温度值,导致测试点的温度值与目标温度值有一定的偏差;此外,在超高压下,气体也不再严格遵守理想气体的状态方程,在体积恒定的情况下,气体的压力和气体的温度不是简单的线性关系;选用的高精度压力测量传感器本身也有 0.05% 的测量误差。
4 结 语
本取样器在 3 500 m 典型深度值下采集的沉积物样品,回到常压状态下,若温度不变,取样器保压值与采样点压力值会有 1.22 MPa 的衰减;温度每变化 1 ℃,压力值相应变化约 0.12 MPa。沉积物中的深海微生物虽然嗜压,对范围不大的压力波动却并不敏感。因此本取样器的保压设计是可靠的,满足深海沉积物中微生物保压的采集需求。
[1]赵昌会, 叶德赞, 魏文铃. 深海微生物的研究进展[J]. 微生物学通报, 2006, 33(3): 142-146. ZHAO Chang-hui, YE De-zan, WEI Wen-ling. Research on deep-sea microbiology[J]. Microbiology, 2006, 33(3): 142-146.
[2]王鹏, 肖湘, 王风平. 西太平洋暖池区深海沉积物细菌群落结构分析[J]. 同济大学学报(自然科学版), 2009, 37(3): 404-409. WANG Peng, XIAO Xiang, WANG Feng-ping. Phylogeny of bacteria in deep-sea sediments from West Pacific warm pool[J]. Journal of Tongji University (Natural Science), 2009, 37(3):404-409.
[3]陈秀兰, 张玉忠, 高培基. 深海微生物研究进展[J]. 海洋科学,2004, 28(1): 61-66. CHEN Xiu-lan, ZHANG Yu-zhong, GAO Pei-ji. Progress in deep-sea microbiology[J]. Marine Sciences, 2004, 28(1): 61-66.
[4]FRY J C, PARKES R J, CRAGG B A, et al. Prokaryotic biodiversity and activity in the deep subseafloor biosphere[J]. FEMS Microbiology Ecology, 2008, 66(2): 181-196.
[5]张宇, 肖湘. 深海微生物的研究与开发[J]. 生命科学, 2012,24(9): 986-990. ZHANG Yu, XIAO Xiang. Research and development on deep sea microbiology[J]. Chinese Bulletin of Life Sciences, 2012,24(9): 986-990.
[6]陈宗恒, 盛堰, 胡波. ROV在海洋科学科考中的发展现状及应用[J]. 科技创新与应用, 2014(21): 3-4. CHEN Zong-heng, SHENG Yan, HU Bo. The ROV development present situation and the application in marine science research[J]. Science and Technology Innovation, 2014(21): 3-4.
[7]李世伦, 程毅, 秦华伟, 等. 重力活塞式天然气水合物保真取样器的研制[J]. 浙江大学学报(工学版), 2006, 40(5): 888-892. LI Shi-lun, CHENG Yi, QIN Hua-wei, et al. Development of pressure piston corer for exploring natural gas hydrates[J]. Journal of Zhejiang University (Engineering Science), 2006,40(5): 888-892.
[8]张庆力, 刘贵杰, 刘国营. 新型海底沉积物采样器结构设计及采样过程动态分析[J]. 海洋技术, 2009, 28(4): 20-23. ZHANG Qing-li, LIU Gui-jie, LIU Guo-ying. The structural design and dynamic analysis of collecting process of new type seabed sampler[J]. Ocean Technology, 2009, 28(4): 20-23.
Development of a deep-ocean semi-automatic sediment pressure sampler for ROV application
ZHUANG Guang-jiao1, WANG Biao2, WU Chao1, GE Tong1
(1. School of Naval Architecture, Ocean and Civil Engineering, Shanghai Jiaotong University, Shanghai 200240, China;2. Shanghai Engineering Research Centre of Hadal Science and Technology, Shanghai Ocean University, Shanghai 201306, China)
As ROVs (Remote Operated Vehicles) used in ocean research activities are more and more mature, sampling tools specially designed for ROV application are needed to obtain rich varieties of deep-ocean samples. Considering the ROV's feasibility and the requirement of pressure retention for deep-ocean sediment sample collection and preservation, a deep-ocean semi-automatic sediment pressure sampleris developed. This paper focuses on three basic technologies of the sampler: deep-ocean semi-automatic sealing, volume displacement and pressure loss compensation. Computational analysis and experiment results indicate the effectiveness of the ROV sampler design.
deep-ocean;pressure retention;volume displacement method;pressurecompensation;sampler;ROV
U674.941;U672.74
A
1672-7619(2016)09-0108-04
10.3404/j.issn.1672-7619.2016.09.022
2016-02-25;
2016-03-17
中国大洋矿产资源研究开发协会资助项目(DY125-21-Js-06)
庄广胶(1986-),男,讲师,研究方向为水下机器人技术。
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:12
科学大众(2020年12期)2020-08-13 03:22:18
时代农机(2018年5期)2018-02-01 23:20:12
通信电源技术(2016年1期)2016-04-16 04:57:29
机电信息(2015年3期)2015-02-27 15:54:53
湖北农机化(2014年1期)2014-12-29 00:42:50
河南科技(2014年11期)2014-02-27 14:17:10
中国新技术新产品(2013年6期)2013-05-12 09:39:26
河北农机(2012年4期)2012-08-15 00:46:00
中国民族民间医药(2012年13期)2012-04-18 11:39:30