
压电陶瓷迟滞非线性前馈补偿器
2016-11-02 03:29徐新行姜振华王挺峰
光学精密工程 2016年9期
方 楚,郭 劲,徐新行,姜振华,王挺峰
(1.中国科学院 长春光学精密机械与物理研究所激光与物质相互作用国家重点实验室,吉林 长春 130033;2.中国科学院大学,北京 100049)
压电陶瓷迟滞非线性前馈补偿器
方楚1,2,郭劲1,徐新行1,姜振华1,王挺峰1
(1.中国科学院 长春光学精密机械与物理研究所激光与物质相互作用国家重点实验室,吉林 长春 130033;2.中国科学院大学,北京 100049)
为了有效补偿压电陶瓷的迟滞非线性, 提出了基于STOP算子的改进PI模型以改善传统基于PLAY算子的PI模型解析求逆的复杂过程以及通过插值算法求逆的大量耗时。介绍了传统的基于PLAY算子和基于STOP算子的PI模型,然后基于STOP算子的叠加形式建立了以预期位移为输入,以控制电压为输出的PI模型, 并将这一模型直接作为前馈控制器补偿压电陶瓷的迟滞效应。为了更好地平衡全局寻优与局部寻优能力, 对粒子群优化算法进行了改进,利用其辨识出各算子的权值。最后,利用实验的方法验证了改进的PI模型对迟滞非线性的补偿效果。进行了两组实验测试, 结果显示:无论对于规律变化还是随机变化的输入,提出的改进PI模型都可以很好补偿迟滞非线性,跟踪误差可控制在1%以内。因此,基于STOP算子的改进PI模型在压电陶瓷控制领域中具有很好的实用价值。
压电陶瓷;迟滞非线性;前馈补偿器;PI模型;STOP算子
1 引 言
由于具有亚纳米级分辨率、亚微秒级的响应时间、数百牛顿的驱动力以及数万赫兹的谐振频率,压电陶瓷在微驱动、微测量领域中得到了广泛研究与应用[1-5]。与电荷控制的压电陶瓷系统不同,在通过电压控制压电陶瓷的系统中,压电陶瓷与控制电压呈现非线性,其最主要的非线性因素是迟滞效应,是影响压电陶瓷控制精度的主要原因[6]。
国内外研究人员针对压电陶瓷的迟滞现象研究大体可分为两类:一类是根据压电陶瓷的微观机理建立物理方程,通过联立方程求解出输入电压与输出位移的关系[7-8],另一类则忽视压电陶瓷的微观机理,根据压电陶瓷输入电压和输出位移的关系建立数学模型。由于第二种方法具有形式简单、便于改进、精度较高等优点,目前工程中多采用数学模型对压电陶瓷进行建模研究。
压电陶瓷的数学模型分为两类:一类是微分方程形式的数学模型,包括Bouc-Wen模型[9-10],多项式模型[11],Duhem模型[12]等,另一类是算子叠加形式的数学模型,主要是指Preisach模型[13]和Prandtl-Ishlinskii模型(简称PI模型)[14]。微分方程形式的数学模型由于考虑了输入变化率对输出的影响,因此对于高带宽迟滞非线性的补偿具有一定作用,然而对于输入变化缓慢的系统,具有算子叠加形式的数学模型具有更简单的形式,其中PI模型因为其解析形式的逆模型的存在而受到更多研究者的青睐。
国内外研究人员大多采用基于PLAY算子的PI模型对压电陶瓷进行建模,然后以其解析逆模型作为迟滞补偿的前馈控制器,或是利用插值算法逐一计算达到预期位移所需要的控制电压值,或是把此数学模型作为控制对象重新设计前馈补偿器[15]。但当研究人员对PI模型进行改进后,逆模型的解析形式就不容易获得,而插值算法在工程应用中要花费较多的时间,会影响补偿器的实时性,本文根据实验获得的压电陶瓷输出位移与输入电压的关系,建立STOP算子叠加形式的以预期位移为输入,以控制电压为输出的PI模型,将这一模型直接作为前馈控制器补偿迟滞效应,从而避免了复杂的求解逆模型过程并节省了插值算法所花费的时间。
2 改进PI模型
2.1PI模型的基本算子
PI模型的基本算子包括PLAY算子与STOP算子。PI模型基本算子如图1所示,PLAY算子可以描述压电陶瓷输出位移随驱动电压变化规律:当驱动电压变化时,压电陶瓷输出位移并不是马上变化,而是等驱动电压变化到阈值时算子的输出才发生变化。
基于PLAY算子的PI模型的离散数学形式为:
y(t)=max{x(t)-r,min{x(t)+r,y(t-T)}},
(1)

(2)
其中:x(t)为模型的输入,一般为压电陶瓷的驱动电压,H(x(t))为模型的输出,一般为压电陶瓷的输出位移,r为算子的阈值,y(t)为算子的输出值,i为阈值的序号,wi为算子的权值。
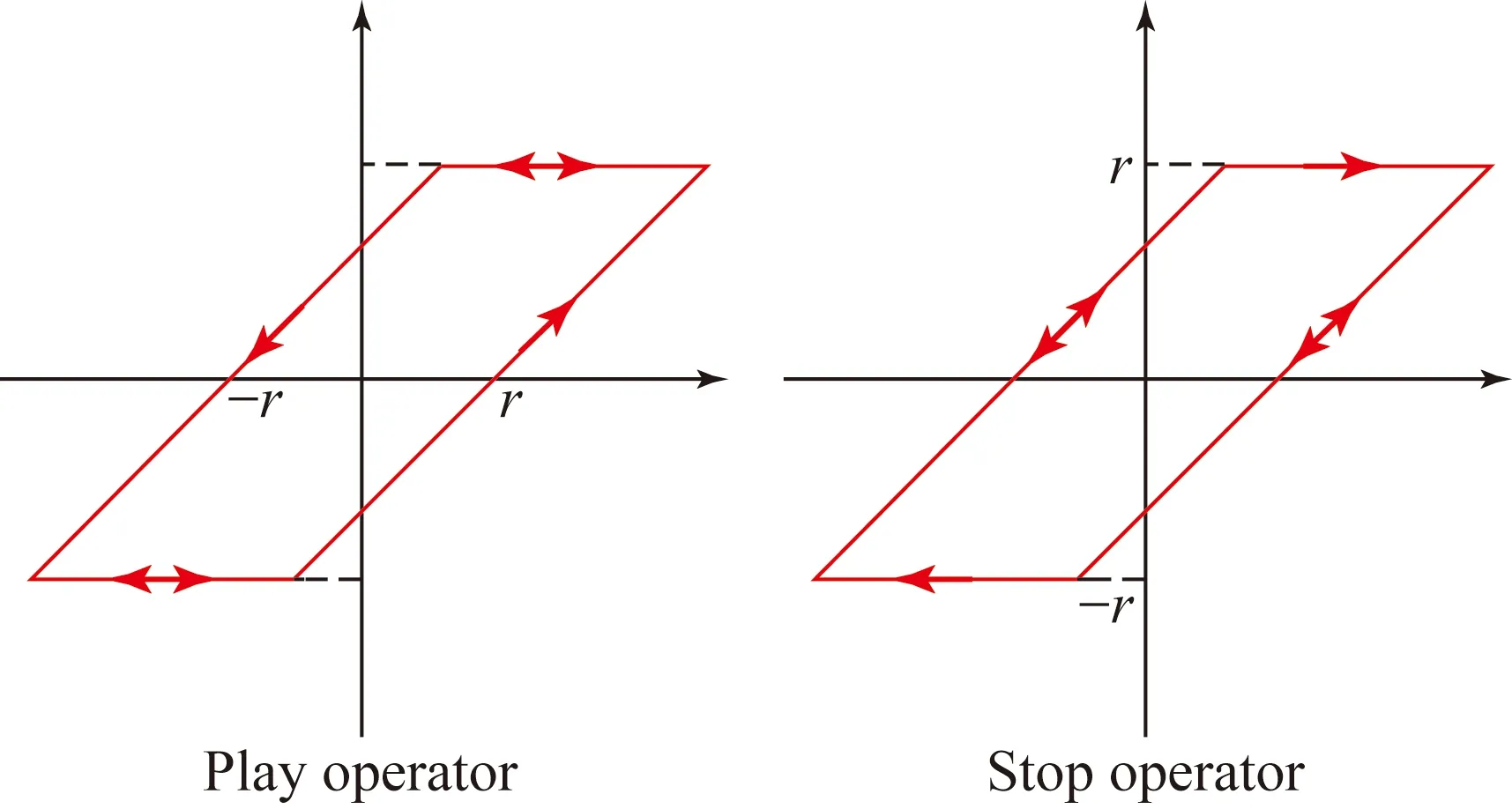
图1 PI模型基本算子
STOP算子最初被用来研究材料的屈服应力[16],由于STOP算子的轨迹为顺时针,而PLAY算子的轨迹为逆时针,因此可以把STOP算子看作PLAY算子的逆过程,利用STOP算子可以研究压电陶瓷的预期位移与驱动电压之间的关系。
基于STOP算子的PI模型的离散数学形式为:
yi(t)=min{ri,max{-r,x(t)-
x(t-T)+yi(t-T)}},
(3)

(4)
2.2基于STOP算子的改进PI模型
基于STOP算子的PI模型可以预测压电陶瓷达到预期位移时所需要的控制电压,其作为前馈补偿器将预测出所需的控制电压输入给压电陶瓷,就可以实现压电陶瓷的输出位移与预期位移之间的线性关系。
由于压电陶瓷的输出位移只能是正值,因此STOP算子的下限阈值应全部为零,而为了方便辨识权值,上限阈值取ri=(i/n)×x(t)max,如果把压电陶瓷的输入输出进行归一化处理,则上限阈值取ri=i/n,n为阈值的数目,i=0,1,2,…,n-1。
则STOP算子变为:
yi(t)=min{ri,max{0,x(t)-
x(t-T)+yi(t-T)}}.
(5)
经过改变的STOP的算子会出现一个问题:对于上限阈值为0的算子,任何输入对算子的输出没有影响,即无论输入为何值,算子的输出都为零。为了有效利用输入为0~0.1之间的实验数据,将PI模型改为:

(6)
其中:f(x(t))为关于x的连续函数,合理选择f(x(t)) 的形式可以使前馈补偿器具有更合理的补偿方案。
由于迟滞曲线具有对称率无关的性质,因此令f(x(t))=αx,即在STOP算子叠加项之前增加线性项,即可充分利用输入为0~0.1之间的实验数据,其中α为线性项的权值。式(5)与式(6)成为基于STOP算子的改进PI模型,其输入为预期位移,输出为控制电压,把它作为压电陶瓷的前馈控制器,可以实现预期位移输入与实际位移输出的线性关系。直接用这种模型作为前馈控制器,避免了基于PLAY算子的PI模型的复杂解析求逆过程,同时也节省了通过插值算法求PI逆模型的时间。
3 改进PI模型的权值辨识
3.1实验设备
在辨识权值之前需要获得压电陶瓷的输入输出实验数据,因此搭建如图2所示的实验设备。通过个人计算机对压电陶瓷控制箱进行操纵,使其向压电陶瓷输入0~100 V单调递增以及100~0 V单调递减的离散电压值,同时,利用电感测微仪测量压电陶瓷的输出位移。为了提高测量精度,压电陶瓷与菱形微位移线性放大机构配合使用使压电陶瓷的输出位移得到放大,电感测微仪的探头处于位移放大机构的输出端。
由于前馈控制器是率无关PI模型,即实验输入输出数据不能受到输入数据变化速率的影响,因此测量的过程比较缓慢。每输入一个离散电压值通过电感测微仪进行一次读数,获得如图3所示的实验数据。把横纵坐标进行了调换,即把H(t) 放在横坐标作为输入,把V(t)放在纵坐标作为输出,这样图形的轨迹变为顺时针,与STOP算子的轨迹相吻合,然后可以通过调整改进PI模型的权值来拟合实验中V(t)与H(t)的关系。
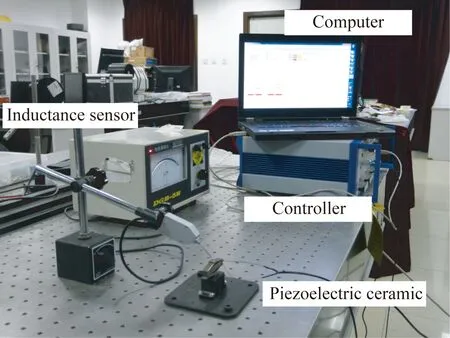
图2 实验设备
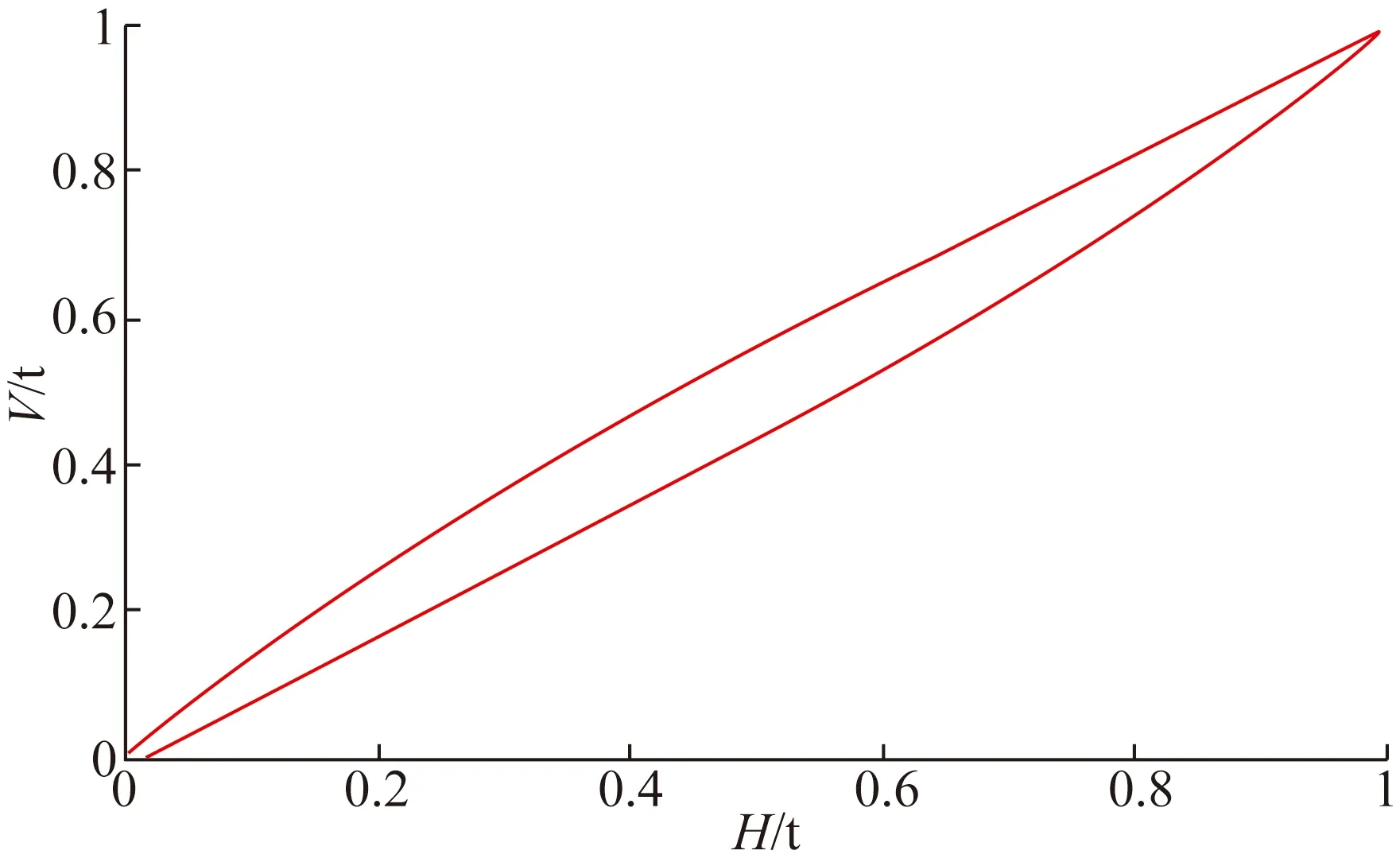
图3 实验测得压电陶瓷输入输出数据关系曲线
3.2权值辨识
3.2.1经典粒子群优化算法
粒子群优化算法[17](Particle Swarm Optimization,PSO)是一种智能高效的寻优算法。结构简单,具有强大的局部寻优能力,然而当寻优参数较多时,PSO算法很容易陷入局部极值,国内外研究人员大多通过对PSO算法进行改进使其针对不同情况获得不同的解决方案。[18]
在粒子群理论中,位置向量与速度向量是两个重要的概念。位置向量由所有需要辨识的参数组成,各粒子通过自身学习与相互学习以求获得具有最佳适应值的位置向量,而速度向量就是每次迭代中对位置向量的校正。粒子群算法的规则为:
vi(t+1)=wvi(t)+c1r1(pi(t)-xi(t))+
c2r2(pg(t)-xi(t)),
(7)
xi(t+1)=xi(t)+vi(t+1),
(8)
其中:xi表示第i个粒子的位置向量,vi表示第i个粒子的速度向量,pi为第i个粒子的历史最优位置,pg为所有粒子的最优位置,w为惯性权值,c1、c2为学习因子,r1、r2为0~1之间的随机数,t为迭代次数。
3.2.2改进粒子群寻优算法
惯性权值与学习因子是影响粒子群优化算法的主要参数,会影响全局寻优与局部寻优之间的平衡。为了达到更好的寻优效果,对3个结构参数进行修改,使它们不再为常数,而是在每次迭代中都会在一定范围内取随机值。
具体的改变措施分为两部分:第一部分是为每一个结构参数取一个上限值和一个下限值,然后使结构参数在两个极值之间随机取值,其结构参数为:
ε=εmin+(εmax-εmin)×r,
(9)
其中:ε表示惯性权值或学习因子。通过设置不同的上限下限可以调整粒子对于全局寻优与局部寻优能力的平衡,而随机取值可以使粒子在迭代中具有更好的适应能力。
第二部分是将每一个结构参数分成两部分,其中大多部分的结构参数变化范围较小,保证了较强的局部寻优能力;而较少一部分的结构参数变化范围较大,从而保证粒子群有足够的全局寻优能力。由于3个结构参数中每个参数都具有不同的2种取值范围,因此可以组合出8种性质不同的粒子。由于不同的粒子具有不同的寻优能力,使得改进的粒子群寻优算法搜索更为全面。
3.2.3粒子群优化算法的对比
为了证明改进粒子群算法对于基于STOP算子的PI模型中的参数辨识具有更优的性质。就要用它与其它改进粒子群算法进行对比。引入3个经典的粒子群算法[19]。
PSO-w:特点是在迭代中惯性权值线性递减,使粒子群在开始迭代时具有较强的全局寻优能力,在迭代后期具有较强的局部寻优能力。其参数取wmax=0.9,wmin=0.4,c1=c2=2.0。
PSO-rw:特点是在迭代中惯性权值随机取值,而学习因子为固定值。其参数取w=0.5+0.5×r,c1=c2=1.494。
PSO-cf:引入了收缩因子,使粒子群具有更强的局部寻优能力,但是全局寻优能力受到了削弱。其参数经过换算后取w=0.729 8,c1=c2=1.496。
粒子群参数取值如下:惯性权值w分成2个大小相同的组,第一组的上限值为1.0,下限值为0.4;第二组的上限值为0.8,下限值为0.6。学习因子c1和c2分成大小不同的两组,较大的那一组占有粒子的数目是较小组的2倍。数目较多的那一组的上限值为2.0,下限值为0;数目较少的那一组的上限值为2.0,下限值为-0.5。
4种粒子群寻优算法的粒子数设定为60,迭代次数为600,其目标函数为:
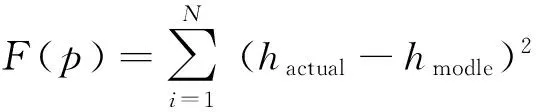
(10)
其中:hactual为压电陶瓷输出的位移,hmodel为PI模型输出的位移,N为实验数据的数量。
为了减少粒子群初始随机位置对寻优结果的影响,统计了100次的试验结果,采用各粒子群优化算法辨识PI模型权值时目标函数平均值随着迭代次数的变化统计结果如图4所示。
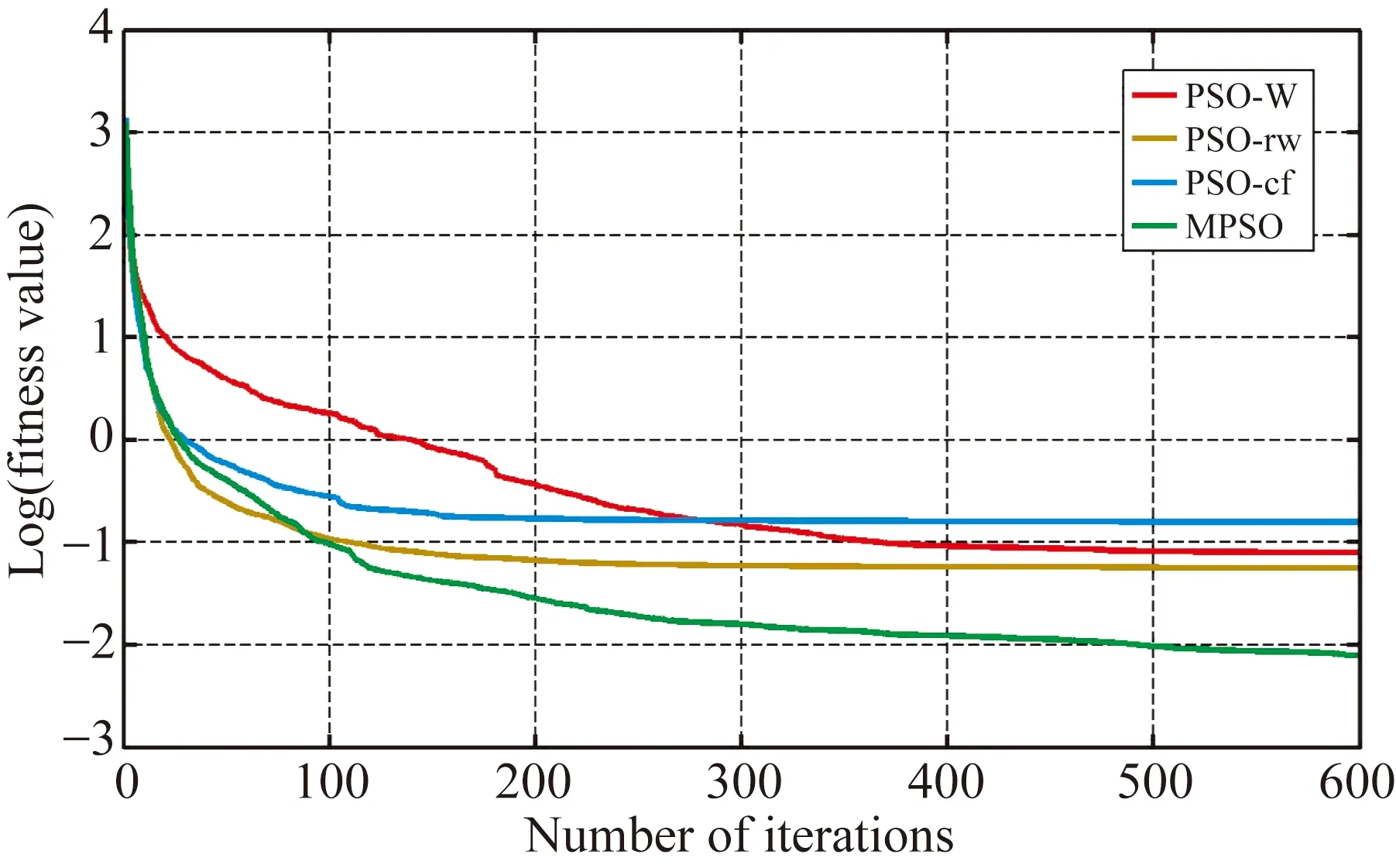
图4 在不同粒子群算法下的辨识结果对比
统计结果发现,改进的粒子群算法具有更为平衡的全局寻优与局部寻优能力,能够达到获得更为优异的位置向量。
3.2.4辨识结果
优化后的权值如表1所示。
优化权值后改进PI模型与实验测得的数据对比如图5所示,误差如图6所示。反映出改进粒子群优化算法可以准确辨识各算子的权值,使PI模型输出的数据与实验数据之间的最大误差相差不超过1.5%,而基于STOP算子的改进PI模型能够非常准确的描述压电陶瓷预期位移与所需要的控制电压之间的关系。

表1 辨识的改进PI模型中的权值
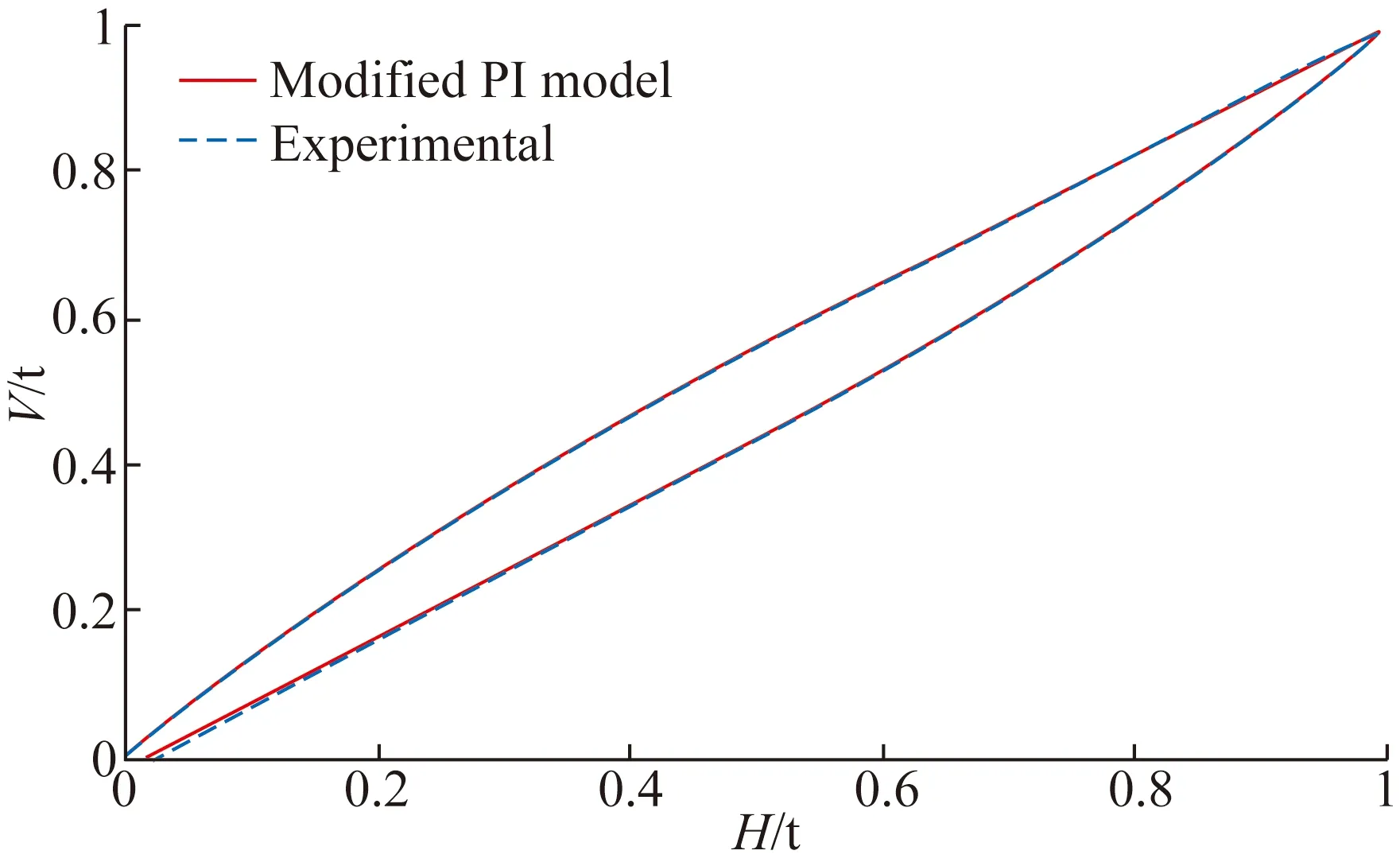
图5改进PI模型与实验数据对比
Fig.5Compare of modified PI model and experiment
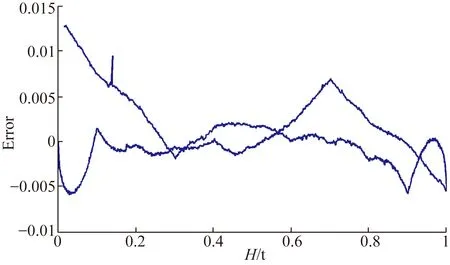
图6 改进PI模型与实验数据的误差
4 实验测试
为了测试改进PI模型作为压电陶瓷迟滞非线性前馈补偿器的效果,利用图2中实验仪器进行测试实验。实验流程如图7所示,在计算机中输入预期位移,通过C语言编写改进PI模型程序从而获得所需要的控制电压,PI E-500控制器通过PIMicromove软件将控制电压施加给压电陶瓷,最后通过电感测微仪检测压电陶瓷的实际位移输出,并与预期输入位移作对比。

图7 实验流程
第一组测试:输入一组幅值递减的三角波形预期位移,实际输出位移与预期位移的对比结果如图8所示,误差如图9所示。
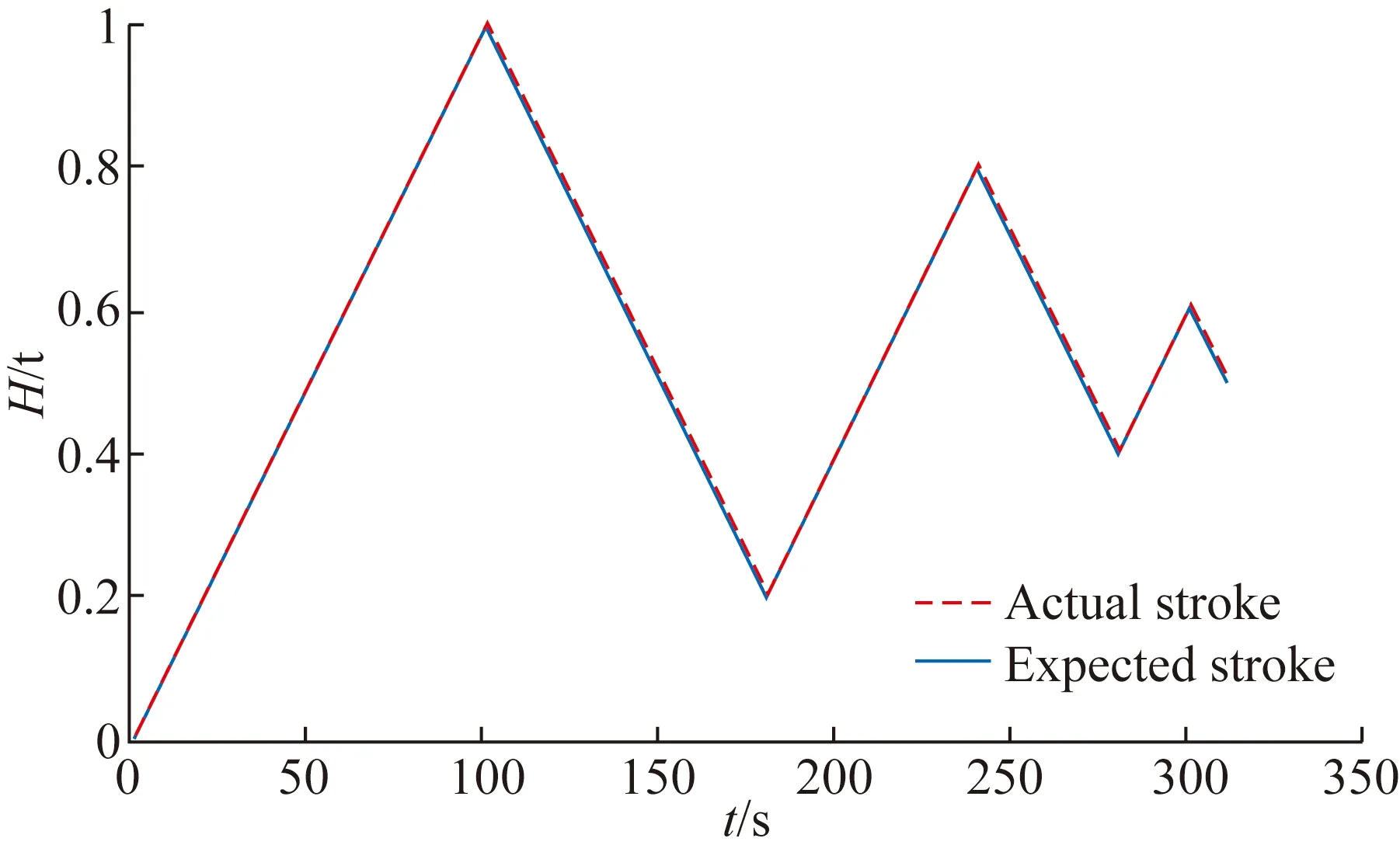
图8 幅值递减三角波形预期位移与实际位移对比
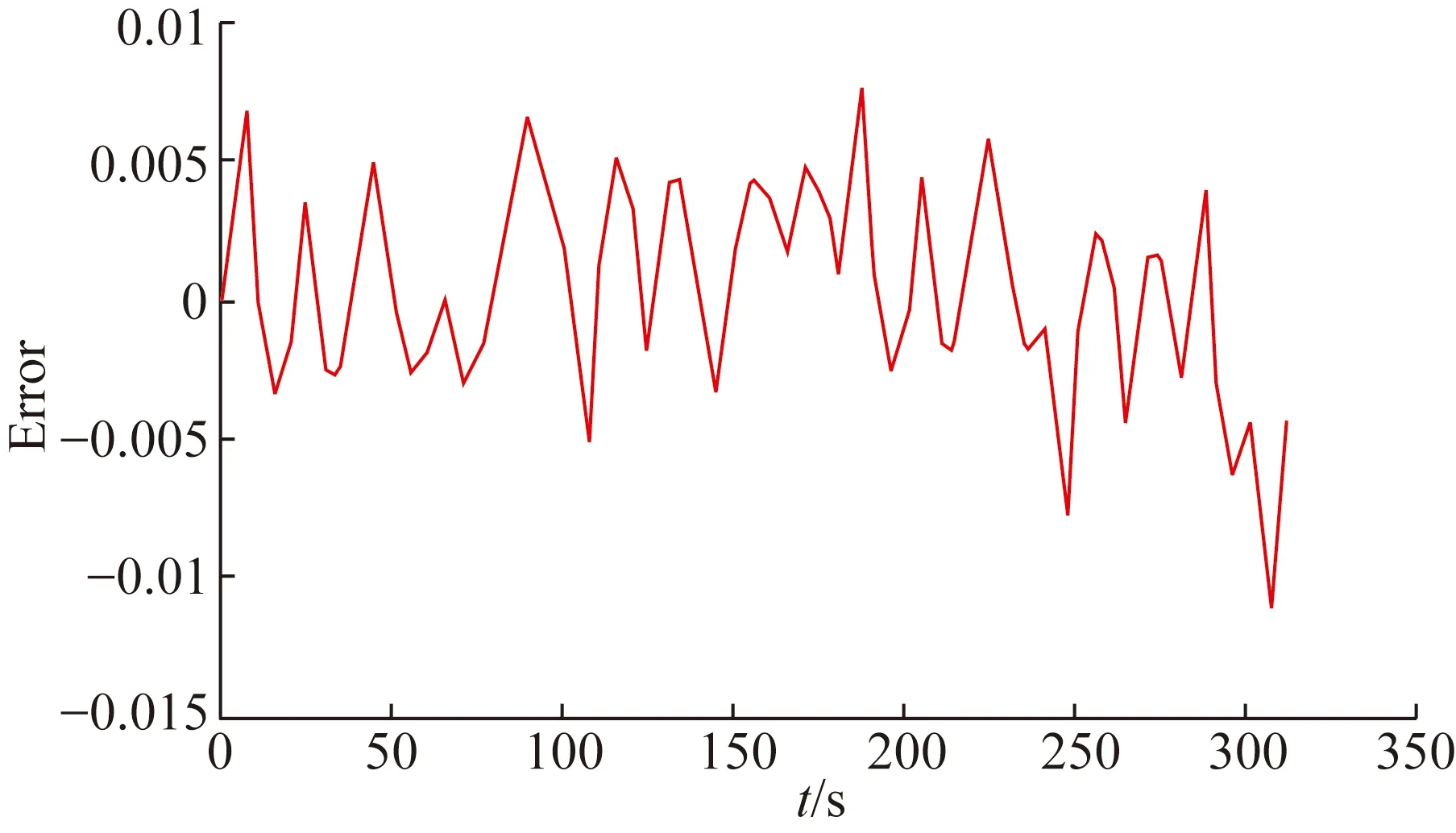
图9 幅值递减三角波形预期位移与实际位移误差
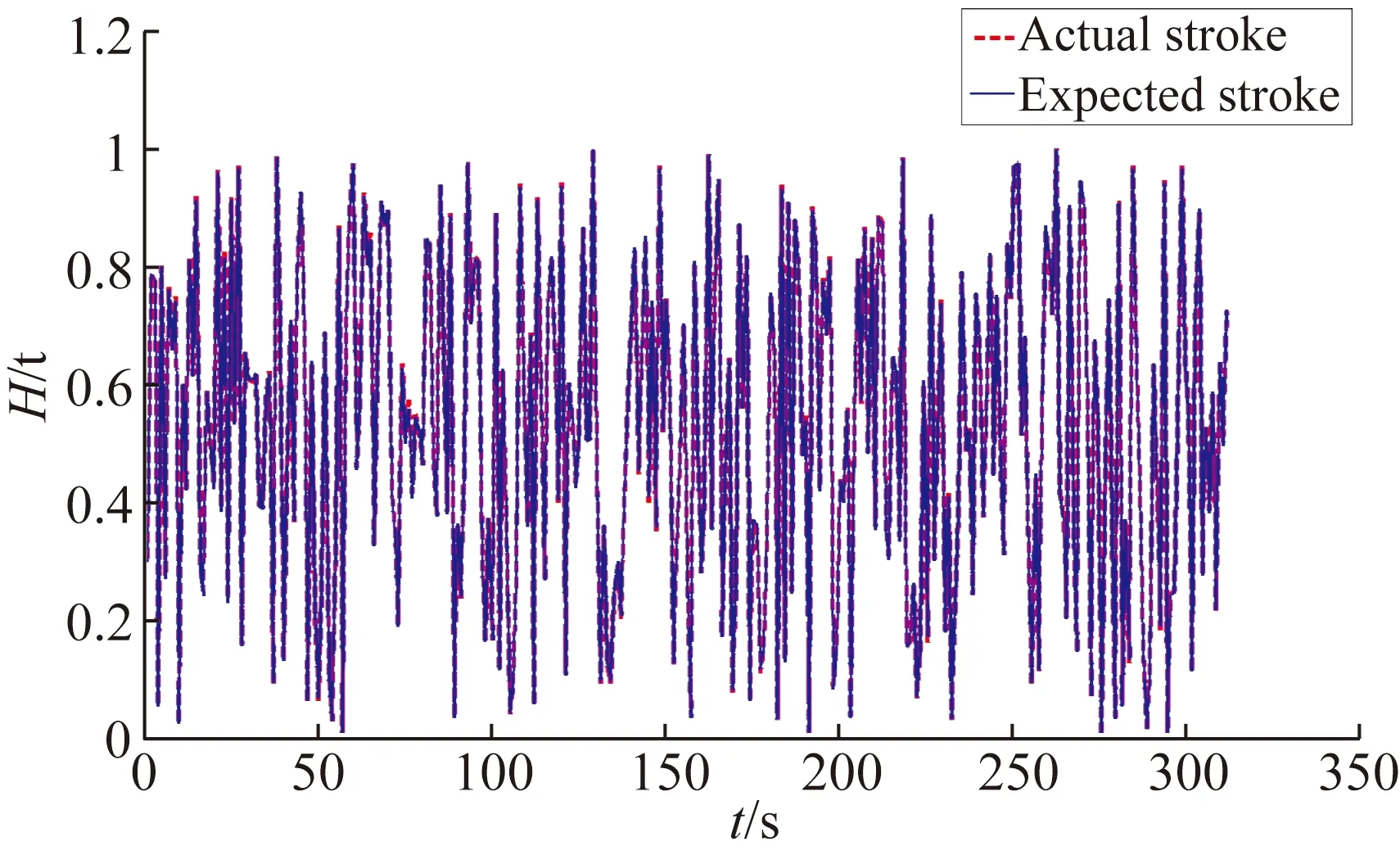
图10 随机波形预期位移与实际位移对比

图11 随机波形预期位移与实际位移误差
第二组测试:输入一组随机的预期位移,实际输出位移与预期位移的对比结果如图10所示,误差如图11所示。可以发现基于STOP算子的改进PI模型能够很好的补偿压电陶瓷的迟滞非线性,实际输出位移与预期输入位移之间的误差较小,基本控制在1%以内。
5 结 论
本文提出的基于STOP算子的改进PI模型可以较好补偿压电陶瓷的迟滞非线性,通过迟滞补偿,压电陶瓷的输出可以跟踪规律变化或是随机变化的预期输入,误差基本控制在1%以内。说明基于STOP算子的改进PI模型是可行的,此外它形式简单、补偿精度高,与以往的基于PLAY算子的PI模型相比,可以避免复杂的解析求逆模型过程,同时在工程中也避免通过插值算法求逆模型而浪费大量时间,因此基于STOP算子的改进PI模型具有很好的工程实用价值。此外本文提出的改进粒子群优化算法,可以更好地平衡全局寻优能力与局部寻优能力。与其它经典粒子群优化算法对比,改进算法可以获得更优异的位置向量,即可以更准确辨识PI模型中的结构参数。
[1]LI W, CHEN X D. Compensation of hysteresis in piezoelectric actuators without dynamics modeling [J].SensorsandActuatorsA:Physical, 2013,199:89-97.
[2]YANG G, WANG D H, LI SH D. Single piezoelectric ceramic stack actuator based fast steering mirror with fixed rotation axis and large excursion angle [J].SensorsandActuatorsA:Physical, 2015,235:292-299.
[3]ZHU W, BIAN L X, AN Y,etal.. Modeling and control of a two-axis fast steering mirror with piezoelectric stack actuators for laser beam tracking [J].SmartStructureandMaterials, 2015,24:075014.
[4]QI K Q, YANG X, CHAO F,etal.. Analysis of the displacement amplification ratio of bridge-type mechanism [J].MechanismandMachineTheory, 2015,87:45-56.
[5]崔玉国,朱耀祥,娄军强,等. 压电微夹持钳钳指位移与夹持力的检测[J]. 光学 精密工程, 2015, 23(5):1372-1379.
CUI Y G, ZHU Y X, LOU J Q,etal.. Detection of finger displacement and gripping force of piezoelectric micro-gripper [J].Opt.PrecisionEng., 2015, 23(5):1372-1379.(in Chinese)
[6]RU CH H, CHEN L G, SHAO B,etal.. A hysteresis compensation method of piezoelectric actuator: Model, identification and control [J].ControlEngineeringPractice, 2009,17:1107-1114.
[7]ZIRKA S E, MOROZ Y I, MARKETOS P,etal..Dynamic hysteresis modeling [J].ScienceDirect:PhysicaB, 2004,343:90-95.
[8]GAUL L, BECKER J. Model-based piezoelectric hysteresis and creep compensation for highly-dynamic feedforward rest-to-rest motion control of piezoelectrically actuated flexible structures [J].InternationalJournalofEngineeringScience, 2009,47:1193-1207.
[9]XIAO SH L, LI Y M. Dynamic compensation andH∞ control for piezoelectric actuators based on the inverse Bouc-Wen model [J].RoboticsandComputer-IntegratedManufacturing, 2014,30:47-54.
[10]袁刚,张小波,王代华,等. 压电式快速反射镜的迟滞特性及线性化[J]. 光学 精密工程, 2015, 23(6): 1650-1656.
YUANG G, ZHANG X B, WANG D H,etal..Hysteresis and linearization of piezoelectric fast steering mirror [J].Opt.PrecisionEng., 2015, 23(6): 1650-1656.(in Chinese)
[11]BAHADUR I M, MILLS J K. A new model of hysteresis of piezoelectric actuators [C].Proceedingsofthe2011IEEEInternationalConferenceonMechatronicsandAutomation. August 7-10, Beijing, China.
[12]MACHI J W, NISTRI P, ZECCA P. Mathematical models for hysteresis [J].SIAWReview. 35(1993)94-123.
[13]MARTIN B. Some mathematical properties of the preisach model for hysteresis [J].TranscationsonMagnetics. 25(4)1989.
[14]LIU S N, SU CH Y. A modified generalized Prandtl-Ishlinskii model and its inverse for hysteresis compensation [C]. 2013AmericanControlConference, Washington, 2013:17-19.
[15]吴伊玲,刘廷霞,张振东,等. 基于PI迟滞模型的压电陶瓷复合控制算法研究[J]. 压电与声光, 2015,37(6):950-953.WU Y L, LIU T X, ZHANG ZH D,etal.. Research on compound control arithmetic ofpiezoelectric ceramic based on PI model [J].Piezoelectrics&Acoustooptics, 2015, 37(6): 950-953.(in Chinese)
[16]JANAIDEH M A, RAKHEJA S, SU CH Y. Experimental characterization and modeling of rate-dependent hysteresis of a piezoceramic actuator [J].Mechatronics, 2009,10:656-670.
[17]BASU M. Modified particle swarm optimization for nonconvex economic dispatch problems [J].ElectricalPowerandEnergySystems,2015,69:304-312.
[18]MU A, CAO D, WANG X H. A modified particle swarm optimization algorithm [J].NaturalScience, 2009,2(1):151-155.
[19]YANG M J, GU G Y, ZHU L M. Parameter identification of the generalized Prandtl-Ishlinskii model for piezoelectric actuators using modified particle swarm optimization [J].SensorsandActuatorsA:Physics, 2013, 189: 254-265.

方楚(1990-),男,内蒙古赤峰人,博士研究生,2012年于上海交通大学获得学士学位,主要从事光学精密仪器的设计与研究。E-mail:cfang1990@hotmail.com

郭劲(1964-),男,吉林长春人,博士,研究员,博士生导师,2007年于中科院长春光机所获得博士学位,主要从事激光与物质相互作用技术研究。E-mail:guojin1964@126.com
(版权所有未经许可不得转载)
Compensating controller for hysteresis nonlinerity of piezoelectric ceramics
FANG Chu1,2, GUO Jin1, XU Xin-xing1, JIANG Zhen-hua1, WANG Ting-feng1
(1.StateKeyLaboratoryofLaserInteractionwithMatter,ChangchunInstituteofOptics,FineMechanicsandPhysics,ChineseAcademyofScience,Changchun130033,China;2.UniversityofChineseAcademyofScience,Beijing100049,China)*Correspondingauthor,E-mail:guojin1964@126.com
To effectively compensate the hysteresis nonlinearity of piezoelectric ceramics, a modified PI model based on STOP operator was proposed to avoid the complex processing in solving inverse model and time consuming in interpolating method of the traditional PI model based on PLAY operator. Firstly, traditional PI models based on PLAY operator or STOP operator were introduced. Then, modified PI model based on STOP operator was established by taking an expecting displacement as the input and a control voltage as the output, and the model was used as a feedback controller to compensate the hysteresis effect of piezoelectric ceramics. To balance the ability of local optimization and global optimization, the particle swarm optimization algorithm was improved to identify the weights of operators with different thresholds. Finally, the modified PI model was used to verify experimentally the compensating effects for the hysteresis nonlinearity. Two groups of experiments were carried out, and the results show that the hysteresis has been compensated well by modified PI model with the error no more than 1% no matter the input is continuous or random. It concludes that, the modified PI model based on STOP operator is of great value in the field of piezoelectric ceramic control.
piezoelectric ceramic; hysteresis nonlinearity; feedback controller; PI model; STOP operator
2015-12-07;
2016-02-03.
长春市科技计划资助项目(No.2013270)
1004-924X(2016)09-2217-07
TN384;TP273
A
10.3788/OPE.20162409.2217
猜你喜欢
数学物理学报(2022年5期)2022-10-09
成都信息工程大学学报(2022年3期)2022-07-21
数学物理学报(2021年2期)2021-06-09
数学物理学报(2021年1期)2021-03-29
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
应用数学(2020年2期)2020-06-24
压电与声光(2019年1期)2019-02-22
铜仁学院学报(2018年6期)2018-07-05
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01
