变姿态柔性机械臂横向振动主动控制理论与实验
2016-11-02 07:12鄂加强郭
天津大学学报(自然科学与工程技术版) 2016年7期
黄 毅,鄂加强郭 岗,胡 伟
(1. 湖南大学汽车车身先进设计制造国家重点实验室,长沙 410013;2. 中联重科股份有限公司国家混凝土机械工程技术研究中心,长沙 410013)
变姿态柔性机械臂横向振动主动控制理论与实验
黄 毅1,2,鄂加强1,郭 岗2,胡 伟2
(1. 湖南大学汽车车身先进设计制造国家重点实验室,长沙 410013;2. 中联重科股份有限公司国家混凝土机械工程技术研究中心,长沙 410013)
综合模态控制和极点配置方法来抑制变姿态柔性机械臂的横向振动.建立了工程适用的柔性机械臂回转系统简化动力学模型,通过模态滤波器和状态观测器实现机械臂末端横向加速度到模态速度和模态位移的转换,结合极点配置法获得当前姿态下系统的模态增益系数,可计算得到模态控制力和实际控制力.实现了基于NI控制器和回转液压作动器的主动控制实验系统,开展了变姿态条件下柔性机械臂横向振动主动控制实验,结果验证了上述方法对变姿态条件下柔性机械臂横向振动抑制的有效性.
姿态时变;柔性臂架;横向振动;模态控制;极点配置;电液作动器
在国家重大工程建设需求推动下,臂架类工程机械正朝着超长化方向发展.但是由于超长机械臂的末端放大效应,加之柔性机械臂的弹性变形,导致回转制动过程中或外部冲击激励作用下,机械臂末端产生剧烈的回转方向振动,严重影响施工安全、作业效率与结构寿命,成为制约超长臂架类工程机械发展的瓶颈之一.国内外相关研究已取得了很多成果.文献[1]对混凝土泵车柔性臂架回转系统进行了动力学建模与振动性能分析.文献[2]利用自适应控制方法驱动滚珠丝杠机构来控制柔性机械臂的非线性振动.文献[3]针对冲击作用下水平姿态柔性机械臂的垂向振动开展实验研究,取得了良好的减振效果.文献[4]分析了球铰接杆式支撑臂展开过程中的横向振动,为振动控制提供了指导.文献[5]研究了使用永磁铁对铁质轴向运动悬臂梁进行横向振动的主动控制.文献[6]结合模态滤波器技术和最优控制理论,采用滑膜控制策略进行了柔性空间结构的振动主动控制研究.文献[7]采用自适应backstepping滑膜方法对具有不确定时变参数和外扰作用下的柔性机械臂进行了振动控制研究.文献[8]采用最优极点配置复合控制策略对柔性连杆机构的振动主动控制进行了研究.文献[9]采用压电陶瓷作动器来抑制回转运动的单杆柔性机械臂的多模态振动.
虽然相关研究成果都取得了明显的减振效果,但主要局限于单一姿态下或机械臂伸缩过程中等简单工况下机械臂振动的分析和控制研究,针对变姿态条件下机械臂横向振动主动控制研究还不多.另外,目前主要利用压电陶瓷作为驱动元件,应用大功率电液作动器实现工程应用的研究还较少.本文以中联重科ZLJ5650,THBB型号泵车的76,m柔性臂架为研究对象,开展变姿态柔性机械臂横向振动主动控制理论与实验研究,验证了模态控制和极点配置复合控制方法抑制变姿态柔性机械臂横向振动的有效性.
1 振动主动控制策略设计
主动控制策略总体思路如下:实时监测机械臂末端横向加速度、机械臂姿态等反馈信号,经过模态控制、极点配置等模块处理后,输出振动主动控制信号,驱动回转作动器的正反回转运动向机械臂施加横向主动控制力,实现机械臂横向振动的有效抑制.
1.1模态控制
合理的机械臂动力学模型是实现变姿态条件下机械臂横向振动控制的基础.综合考虑减振控制器的计算成本和控制本身的复杂程度,根据机械臂结构特点对机械臂进行合理的降阶离散化处理,将每段机械臂离散成若干个梁单元进行简化处理,建立工程适用的柔性机械臂回转系统简化动力学模型.通过有限单元方法可获取机械臂回转系统动力学模型的质量阵、刚度阵和阻尼阵,进而根据动力学方法计算得到当前臂架姿态对应条件下柔性机械臂的模态特性.基于独立模态空间控制原理而设计的模态控制流程如图1所示,整个控制流程分为2个不同的控制阶段:第1阶段是主动控制器的工作流程部分,即控制系统的反馈回路部分,该阶段的输入是加速度传感器测得的机械臂末端的横向振动加速度信号,输出是控制电磁阀的控制电流;第2阶段是回转作动器的输出力对机械臂的主动控制部分.其中,M、K、C分别为机械臂系统质量阵、刚度阵和阻尼阵,..x为机械臂末端水平加速度,qn、q.n、q..n为系统第n阶横向模态位移、横向模态速度和横向模态加速度,gn、hn为模态位移和模态速度的控制器增益,Tn为转换矩阵,nΦ为第n阶模态滤波器向量,nϕ为第n阶模态振型向量,un为第n阶模态控制力.
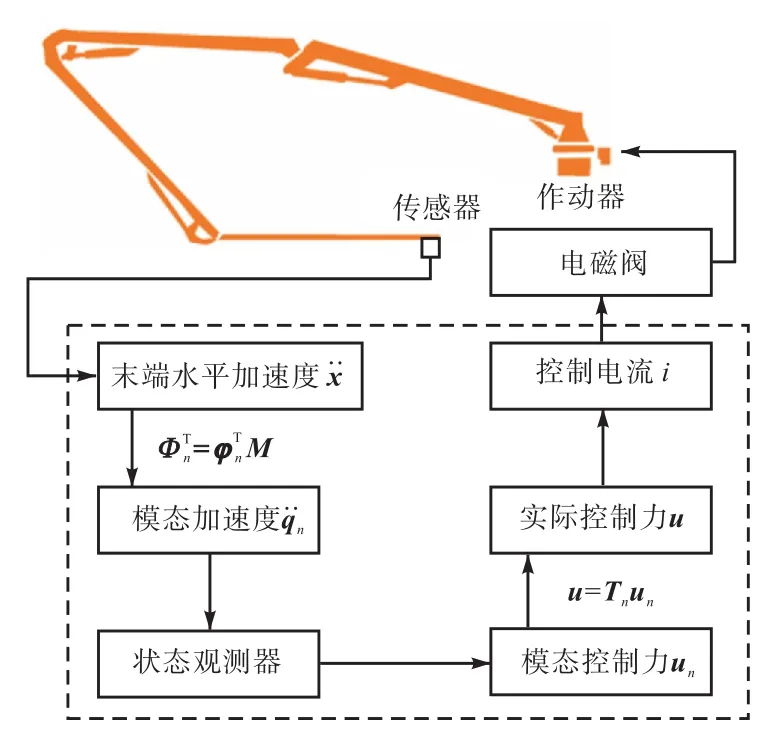
图1 模态控制流程Fig.1 Flowchart of modal control
机械臂振动响应x可由解耦的各阶模态响应表示为

式中m为主模态数.
一般泵车臂架横向振动以低阶模态为主,尤其是1阶横向模态贡献率最大,因此主要针对柔性机械臂1阶横向模态进行控制.另外,由于机械臂运动形式是大范围刚体运动与弹性振动的复合,很难对机械臂末端的位移量进行测量,但较容易获取末端加速度.通过监测机械臂末端的横向加速度信号,经过模态滤波器和状态观测器实现从物理加速度到模态空间的转换,得到模态速度和模态位移,进一步计算获取模态控制力,实现在不影响其他未控横向模态前提下,对不同姿态机械臂1阶横向模态的独立控制,即
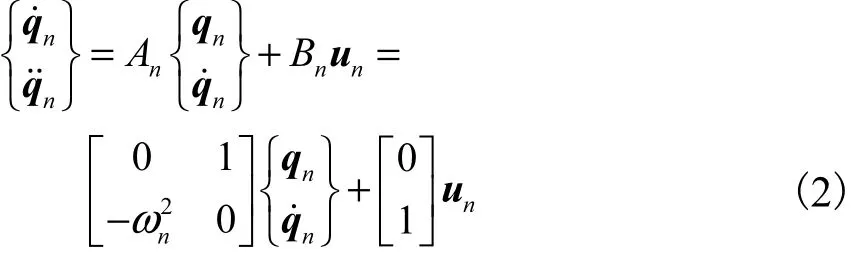
式中ωn为系统第n阶横向圆频率.
对于要控制的第n阶横向模态,对应的模态控制力为

由于独立模态空间控制方法中的振动系统的各阶模态都是相互独立的,可计算得到实际控制力

1.2极点配置
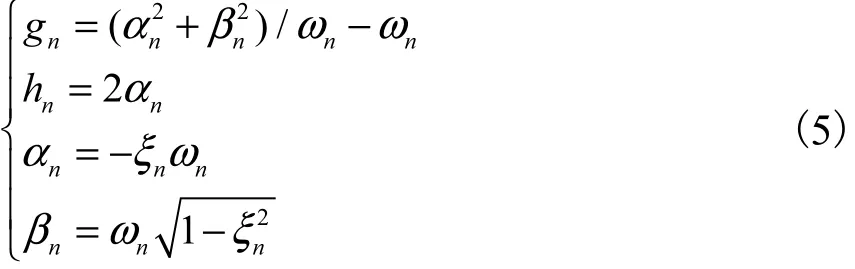
采用极点配置方法确定式(3)中模态控制力增益系数gn和hn.通过分析柔性机械臂系统特性,合理平移系统1阶横向模态对应的极点,实现系统阻尼的增大,以衰减末端横向振动.若要求第n阶模态极点配置在λn=αn±βnj 处,则可从闭环特征方程求得
研究对象ZLJ5650THBB泵车各节机械臂的主要结构参数如表1所示.
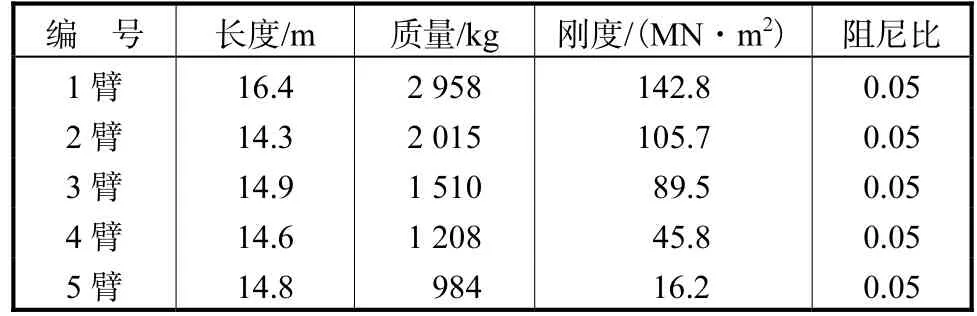
表1 机械臂结构参数Tab.1 Structure parameters of manipulator
工程施工中泵车臂架姿态有多种,本文只选择水平、拱形2种典型臂架姿态为代表进行说明,见图2,如果上述振动控制方法在这2种姿态下有效,当然也适用于其他任意机械臂姿态.拱形姿态中1~5臂与水平面夹角分别为55°、26°、-6°、-34°、-60°.采用前述机械臂离散化处理可计算得到水平和拱形两种姿态下机械臂系统的1阶横向模态参数.
水平和拱形2种姿态下极点分布如图3所示.2种姿态机械臂第1阶横向振型表现为1阶横向弯曲,模态频率分别为0.22,Hz和0.76,Hz,模态阻尼比分别为0.031和0.052.由极点分布可知,2种姿态对应的未控系统1阶横向模态对应的极点分别为λ1,2=-0.043± 1.382j ,λ3,4=-0.248±4.769j.由于两种姿态下机械臂回转系统阻尼比都很小(分别为0.031和0.052),在回转制动过程中或外部冲击激励作用下容易引起柔性机械臂末端较大的横向振动,且很难迅速衰减.要实现机械臂1阶横向模态的主动控制,就要通过施加外部作用力以增大1阶模态阻尼值.考虑混凝土泵车的实际情况,设定1阶模态阻尼比增量倍数为8.为了尽量不改变系统固有频率,将未控系统1阶横向模态极点沿着水平线向左平移进行极点配置,此时极点虚部保持定值.配置后,水平和拱形姿态下受控系统1阶横向模态对应的极点分别为λ1′,2、λ3′,4,且λ1′,2=-0.346± 1.382j ,λ3′,4=-1.686± 4.769j.
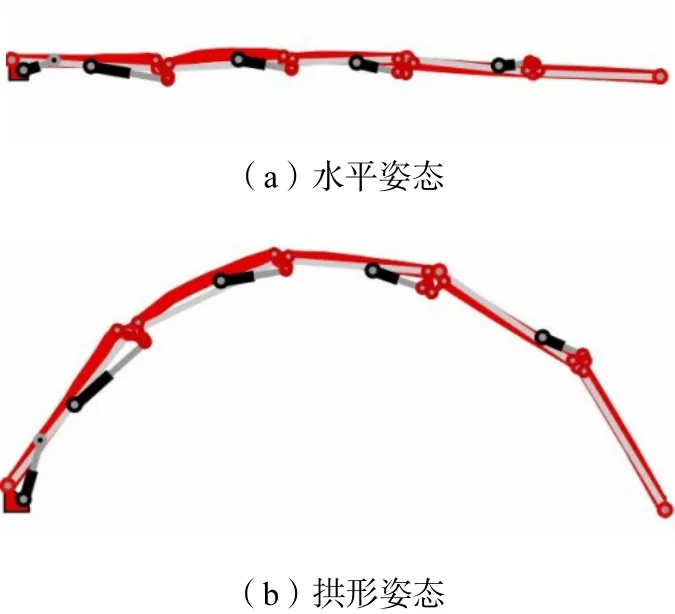
图2 机械臂姿态示意Fig.2 Postures of manipulator
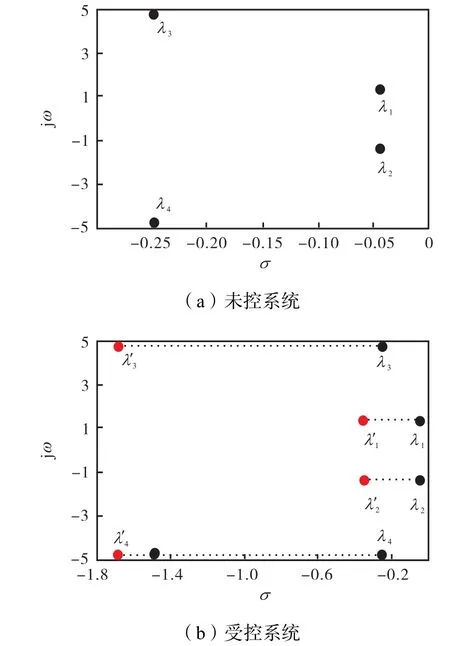
图3 控制系统的极点分布Fig.3 Pole distribution of control system
2 振动主动控制系统实现与实验
2.1控制系统实现
振动主动控制系统采用LabVIEW语言实现控制算法,硬件主要包括控制器、作动器和传感器.主动控制系统实现框图如图4所示.
控制器用于反馈信号的采集与处理、控制信号的计算与输出,采用内置400,MHz主频微处理器的美国NI CompactRIO 9014嵌入式控制器,并搭配NI 9862、NI 9233、NI,9203和NI 9401模块,安装于泵车侧面的主电控柜中.其中,NI 9862高速CAN模块用于采集泵送开闭、减振开闭等设备状态信号及位移传感器信号,NI 9233加速度模块用于采集振动加速度信号,NI 9203电流模块用于采集倾角传感器信号,NI 9401数字输出模块用于输出PWM形式的振动控制信号至电磁阀,以实现对回转液压作动器的控制.
振动主动控制作动器的作动由泵车臂架回转机构完成,即通过控制电流驱动电磁阀的开闭与换向,控制回转液压马达的正反转,再经过回转减速机的减速,驱动与机械臂根部固定的回转支承的正反转,从而实现对机械臂施加正反向横向作用力.
反馈传感器包括1个PCB 393B04加速度传感器、5个BAUMER倾角传感器及1个HESMOR拉线位移传感器.其中,PCB 393B04加速度传感器灵敏度为1,000,mV/g,并沿水平方向安装于第5节机械臂末端,实时反馈机械臂末端的横向振动信号;BAUMER倾角传感器安装于每节机械臂的侧面,实时反馈臂架姿态;HESMOR拉线位移传感器安装于地面支撑杆上,通过拉线与机械臂末端水平联接.
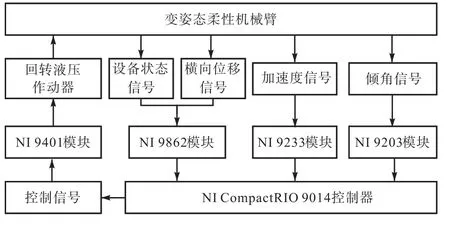
图4 主动控制系统实现示意Fig.4 Block diagram of active control system
2.2减振控制实验
为了考察上述振动主动控制方法对于柔性机械臂的减振效果以及姿态适应性,在混凝土泵车样机上开展了验证实验.采用的泵车型号ZLJ5,650THBB,机械臂总长76,m.通过操作人员操作遥控器的回转旋钮,可实现机械臂的回转运动,当操作人员松开回转旋钮操作时,机械臂失去控制指令后会刹车急停,导致机械臂末端较大的横向振动.为了验证变姿态下的减振效果,实验选取机械臂水平和拱形2种姿态工况(见图5),在这2种工况下通过测量机械臂末端的横向位移分别对比开启和关闭主动控制功能的机械臂振动幅值及振动衰减时间,判断减振效果.其中,开启主动控制功能即采用本文所述主动减振技术,关闭主动控制功能即采用行业现有技术,通过斜坡延时来衰减振动,延时时间为1,s.
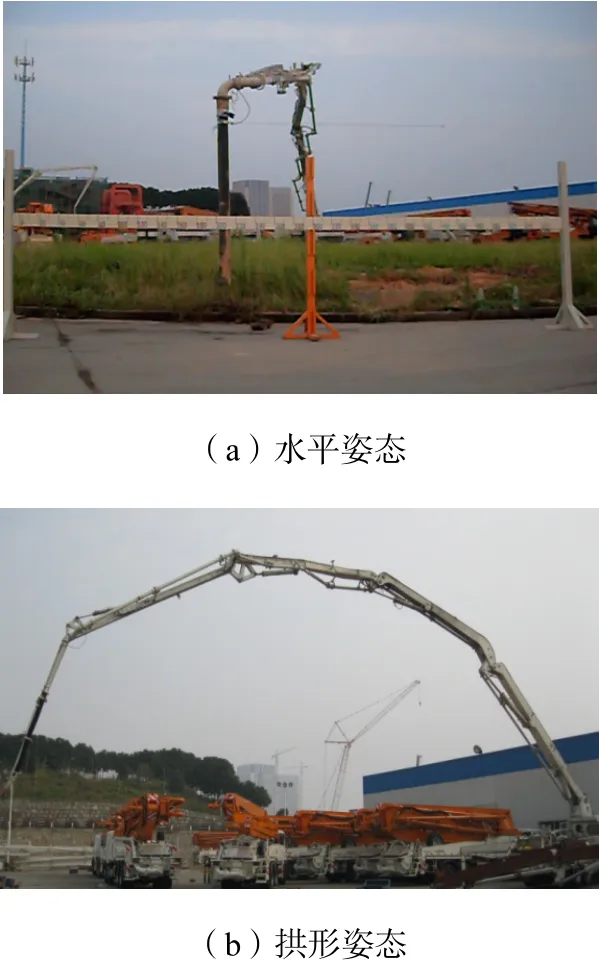
图5 实验平台及工况条件Fig.5Photograph of the experimental setup and working conditions
由图6(a)中水平姿态下机械臂末端横向位移曲线可以看出,开始实施振动主动控制前(0~5,s期间),持续往一个方向操作泵车遥控器上的回转钮,使得机械臂朝一个方向回转运动,在5,s时突然停止回转操作,由于巨大回转惯量导致机械臂末端横向振动幅值达到约1,700,mm.若采用目前行业斜坡延时技术,横向振幅会逐步缓慢衰减,但衰减时间较长,历经20,s后横向振动由1,700,mm衰减到700,mm,衰减率约60%,;若在5,s时开启振动主动控制功能后,振动幅值在3,s内迅速衰减到500,mm,并在持续控制7,s后,振动衰减到300,mm.
由图6(b)中拱形姿态下机械臂末端横向位移曲线可以看出,开始实施振动主动控制前(0~5,s期间),持续往一个方向操作泵车遥控器上的回转钮,使得机械臂朝一个方向回转运动,在5,s时突然停止回转操作,由于巨大回转惯量导致机械臂末端横向振动幅值达到约900,mm.若采用目前行业斜坡延时技术,横向振幅会逐步缓慢衰减,但衰减时间较长,历经20,s后横向振动由900,mm衰减到400,mm,衰减率约60%,;若在5,s时开启振动主动控制功能后,振动幅值在3,s内迅速衰减到200,mm,并在持续控制7,s后,振动衰减到60,mm.
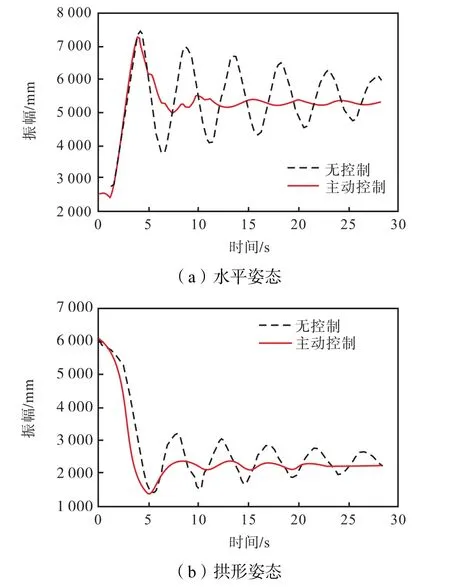
图6 减振效果对比曲线Fig.6 Contrast curve of damping effect
3 结 语
针对机械臂姿态时变过程中柔性机械臂末端的横向振动问题,综合模态控制和极点配置方法来抑制变姿态柔性机械臂的横向振动.建立了工程适用的柔性机械臂回转系统简化动力学模型,通过模态滤波器和状态观测器实现机械臂末端横向加速度向模态速度和模态位移的转换,结合极点配置法获得当前姿态下系统的模态增益系数,可计算得到模态控制力和实际控制力.实现了基于NI控制器和回转液压作动器的主动控制实验系统,开展了水平和拱形姿态条件下柔性机械臂横向振动主动控制实验.理论和实验结果表明:综合模态控制和极点配置的主动控制方法对变姿态柔性机械臂横向振动控制具有很好的适应性和明显的减振效果;选择泵车回转机构的电液马达
作为机械臂横向振动主动控制作动器的方案是可行的.本方法提高了作业过程中变姿态柔性机械臂末端的横向运动平稳性,对我国超长柔性臂架工程机械的动力品质提升具有重要的理论和工程价值.
[1] 黄 毅,郭 岗,邝 昊,等. 混凝土泵车臂架回转系统动力学分析及预测[J]. 机械强度,2014,36(2):300-304. Huang Yi,Guo Gang,Kuang Hao,et al. Dynamics analysis and prediction on boom slewing system of the concrete pump truck [J]. Journal of Mechanical Strength,2014,36(2):300-304(in Chinese).
[2] Qiu Zhicheng. Adaptive nonlinear vibration control of a Cartesian flexible manipulator driven by a ballscrew mechanism [J]. Mechanical Systems and Signal Processing,2012,30:248-266.
[3] 黄 毅,吴斌兴,王佳茜. 混凝土泵车臂架振动响应的主动控制实验研究[J]. 振动与冲击,2012,31(2):91-94. Huang Yi,Wu Binxing,Wang Jiaqian. Test for active control of boom vibration of a concrete pump truck [J]. Journal of Vibration and Shock,2012,31(2):91-94(in Chinese).
[4] 刘志全,黎 彪,丁 锋. 球铰接杆式支撑臂展开过程中横向振动分析[J]. 宇航学报,2014,35(7):753-761. Liu Zhiquan,Li Biao,Ding Feng. Analysis of transverse vibration of an ADAM-type mast in deployment process [J]. Journal of Astronautics,2014,35(7):753-761(in Chinese).
[5] Wang Liang,Chen Huaihai,He Xudong. Active H∞control of the vibration of an axially moving cantilever beam by magnetic force [J]. Mechanical Systems and Signal Processing,2011,25(8):2863-2878.
[6] Hu Qinglei. Sliding mode attitude control with L2-gain performance and vibration reduction of flexible spacecraft with actuator dynamics [J]. Acta Astronautica,2010,67(5):572-583.
[7] Dong Liang,Tang Wen Cheng. Adaptive backstepping sliding mode control of flexible ball screw drives with time-varying parametric uncertainties and disturbances[J]. ISA Transactions,2014,53(1):110-115.
[8] Ouyang H,Richiedei D,Trevisani A. Pole assignment for control of flexible link mechanisms [J]. Journal of Sound and Vibration,2013,332(12):2884-2899.
[9] Shan Jinjun,Liu Hongtao,Sun Dong. Slewing and vibration control of a single-link flexible manipulator by positive position feedback(PPF)[J]. Mechatronics,2005,15(4):487-503.
(责任编辑:金顺爱)
Theoretical and Experimental Study on Active Control of Transverse Vibration of Flexible Manipulator in Time-Varying Postures
Huang Yi1,2,E Jiaqiang1,Guo Gang2,Hu Wei2
(1.State Key Laboratory of Advanced Design and Manufacturing for Vehicle Body,Hunan University,Changsha 410013,China;2.National Engineering Research Center for Concrete Machinery,Zoomlion Heavy Industry Science & Technology Limited Company,Changsha 410013,China)
This paper presents an approach combining modal control and pole assignment for suppressing transverse vibration of flexible manipulator in time-varying postures.The dynamical model of rotation system of flexible manipulator,which is convenient to apply to engineering,was established.By employing the modal filter and state observer techniques,a conversion method from acceleration signal measuring transverse-direction vibration of the manipulator tip to modal velocity and displacement was implemented.After calculating modal gain coefficients through pole assignment method,the modal control force was obtained and actual control force was transformed.The experimental setup of vibration active control based on NI controller and slewing electro-hydrostatic actuator was accomplished and experiments on the active control of transverse vibration of flexible manipulator in time-varying postures were carried out.The experimental results show the efficiency of the method on suppressing transverse vibration of flexible manipulator in time-varying postures.
time-varying posture;flexible manipulator;transverse vibration;modal control;pole assignment;electro-hydrostatic actuator
TH113.1
A
0493-2137(2016)07-0716-05
10.11784/tdxbz201507099
2015-07-30;
2015-10-26.
国家自然科学基金资助项目(51305045);中国博士后科学基金资助项目(2014M562099).
黄 毅(1978— ),男,博士,高级工程师.
黄 毅,tjhuangyi110@hnu.edu.cn.
网络出版时间:2015-11-11. 网络出版地址:http://www.cnki.net/kcms/detail/12.1127.N.20151111.1733.002.html.
猜你喜欢
湖南水利水电(2021年6期)2022-01-18
辽宁师专学报(自然科学版)(2021年1期)2021-07-21
家庭影院技术(2020年6期)2020-07-27
中国工程机械学报(2019年6期)2019-12-31
质量技术监督研究(2018年1期)2018-03-26
进出口经理人(2016年15期)2017-05-10
制造业自动化(2017年2期)2017-03-20
专用汽车(2016年7期)2016-11-23
商场现代化(2016年12期)2016-06-06
企业导报(2016年10期)2016-06-04