
SVPWM逆变器死区补偿中的电流极性检测
2016-11-01 10:16张展,高照阳
大连工业大学学报 2016年5期
张 展, 高 照 阳
( 河南理工大学 电气工程与自动化学院, 河南 焦作 454000 )
SVPWM逆变器死区补偿中的电流极性检测
张 展,高 照 阳
( 河南理工大学 电气工程与自动化学院, 河南 焦作454000 )
在分析SVPWM逆变器死区补偿的基础上,针对负载电流产生畸变,电流中含有谐波,导致不能精确判断电流的极性问题,提出了一种电流极性检测的方法。与常用的利用电流矢量角来判断三相电流极性的方法相比,不需要过多的计算,方法更加简单且易于实现。最后通过仿真证明此方法的正确性。
逆变器;补偿;极性
0 引 言
在电压型脉宽调制逆变器中,为了防止逆变器同一桥臂的上下两个功率开关器件造成直通短路,通常在控制信号中加入死区时间。然而死区时间的加入,使逆变器输出的电压、电流波形发生畸变,谐波含量增大,基波电压、电流波形有损失[1-3]。因此,有必要对逆变器的死区进行补偿。
为了解决死区的影响,大多数学者对死区补偿策略进行了研究,然而对于死区补偿中电流极性检测的研究却很少。理论上,根据电流的过零点可以准确判断电流极性。但是由于负载电流产生畸变,其中有谐波的存在,使得电流过零点模糊,尤其在低频时,还存在零电流钳位现象和脉宽调制噪声的影响;开关频率附近的谐波分量较多,使得电流检测中出现多个过零点[4],因此直接利用电流过零点的方法难以确保检测到的电流极性的精度。通常采用的方法是对三相电流进行滤波处理,然后再判断极性,然而滤波环节的引入使得电流发生改变,尤其是其相位的变化带来检测信号滞后的问题,使得对电流检测的实时性变差[3]。倘若电流方向检测不准确,就不能准确地对PWM脉宽进行修正,从而导致误补偿,其结果非但不能消除死区的影响,反而会使逆变得到的波形畸变更加严重[4]。因此找到一种能够精确快速检测电流极性的方法至关重要。
葛黄徐等[1]提出的功率因数角预测电流矢量的方法需测量多个电量,除运算复杂外,还增加了传感器。孙向东等[5]指出预测电流过零点的检测方法用于中高频段补偿才具有较好的补偿效果,而用于低频段补偿效果不够理想。本研究对目前常用的电流矢量角检测电流极性方法进行了改进,改进的方法不需要添加硬件电路,不必对三相电压进行运算,只对电流进行运算即可。
1 死区效应及常用的补偿方法分析
以逆变器A相为例对死区效应进行分析,当对上下桥臂开关管的驱动脉冲信号置入死区后,同一桥臂上的两个开关管不再是同一时刻开通和关断,而是将要关断的开关管正常关断,将要开通的开关管延时开通。此时驱动脉冲信号如图1所示,图中a表示上桥臂触发信号,a′表示同一桥臂的下桥臂触发信号。从图中可以看出,死区时间的加入使得开通脉宽宽度减小,而关断脉宽宽度增加。

图1 加入死区时间后A相的驱动信号
逆变器输出电流方向以图2所示方向为参考正方向。在死区时间内,电流不可能突变,实际上电流是通过续流二极管构成回路的。

图2 三相逆变器A相电路
(1)iA>0时,电流的流通路径为V1或VD2。当电流流通路径为V1时,电路中两个开关管的状态为V1导通,V2关断,当两个开关管状态发生改变时,此时死区时间内没有电压的误差;当电流流通路径为VD2时,相当于V1关断,V2导通,当两个开关管状态发生改变时,此时的死区时间内V1延迟时间td导通,VD2导通时间增加了td,与理想情况下相比,电压作用时间减少了时间td,输出电压产生误差。
(2)iA<0 时,电流的流通路径为V2或VD1。当电流流通路径为V2时,电路中两个开关管的状态为V2导通,V1关断,当两个开关管状态发生改变时,此时死区时间内没有电压的误差;当电流流通路径为VD1时,相当于V1导通,V2关断,当两个开关管状态发生改变时,此时的死区时间内V2延迟时间td导通,VD1导通时间增加了td,与理想情况下相比,电压作用时间增加了时间td,输出电压产生误差。
根据上述分析,画出理想情况、iA>0和iA<0这三种情况下的输出电压波形,如图3所示(1为无死区时输出电压波形,2为有死区且电流iA>0时输出电压波形,3为有死区且电流iA<0时输出电压波形),其中阴影部分为误差电压。

图3 输出电压波形
关于死区效应的问题,越来越引起人们的注意,对此不少人已经提出很多死区补偿的方法[6-8]。对死区进行补偿时,利用硬件的补偿方法使得补偿的成本增加[9],因而在实际中应用较少。为降低额外成本,实际大都采用对原程序中增加补偿部分算法的软件补偿方法。文献[10]和[11]中指出了根据各相电流极性对矢量变换中三相电压的参考值进行修正的方法,这是一种平均补偿,实时性和准确性都不高。为避免平均补偿缺点,在每个PWM计算周期都对开关触发时间进行修正,来消除对死区时间td的影响[3,12-13],目前应用最多的方法就是这种根据三相电流的极性对PWM的脉宽进行修正,增加或减少PWM的宽度来达到补偿的目的,这种方法是根据电流的实时性对PWM脉宽进行修复的。
2 电流极性的检测
目前死区补偿中,应用最广的方法为利用电流矢量角来间接判断电流的极性。假设检测到的三相负载电流分别为ia、ib、ic,三相电流中除基波电流之外,还含有大量的谐波分量。通过式3/2坐标变换,把静止abc坐标系下的三相负载电流转换到αβ坐标系下的两相正交电流,再通过2s/2r坐标变换,从静止两相正交坐标系αβ变换到同步旋转正交dq坐标系下。结果如式(1)所示,经过坐标变换得到旋转dq坐标系下的电流由直流电流和交流电流两部分组成。
(1)
等式右边的isd、isq为三相abc坐标系下负载基波电流转换到dq坐标系下的直流量,idh、iqh为三相abc坐标系下电流高频分量转换到dq旋转坐标系下的高次谐波分量。将转换得到dq旋转坐标系下的电流通过低通滤波器进行滤波,电流中的idh、iqh部分被滤波器滤除,而isd、isq在dq旋转坐标系下是直流电流,可以通过低通滤波器。此方法的优点为经过低通滤波器后,合成直流部分的基波分量的幅值和相位不会发生改变,克服了时间延迟的缺点。根据电流矢量的空间位置特性,画出其图形,如图4所示。
由图4可得
φ=arctan(isq/isd)
(2)
θ=θs+φ
(3)
θs=ω∫dt
(4)
其中ω为电流基波的角频率,φ为三相负载电流合成的电流矢量与d轴的夹角,θs为dq旋转坐标系同步旋转的角度,由φ和θs可得负载电流矢量的空间绝对位置角θ。对电流矢量和电流位置角θ进行分析,可以得到θ与三相负载电流极性的对应关系如表1所示,表中“+”表示电流正方向,“-”表示电流负方向。根据θ的范围可以准确地判断三相负载电流极性。
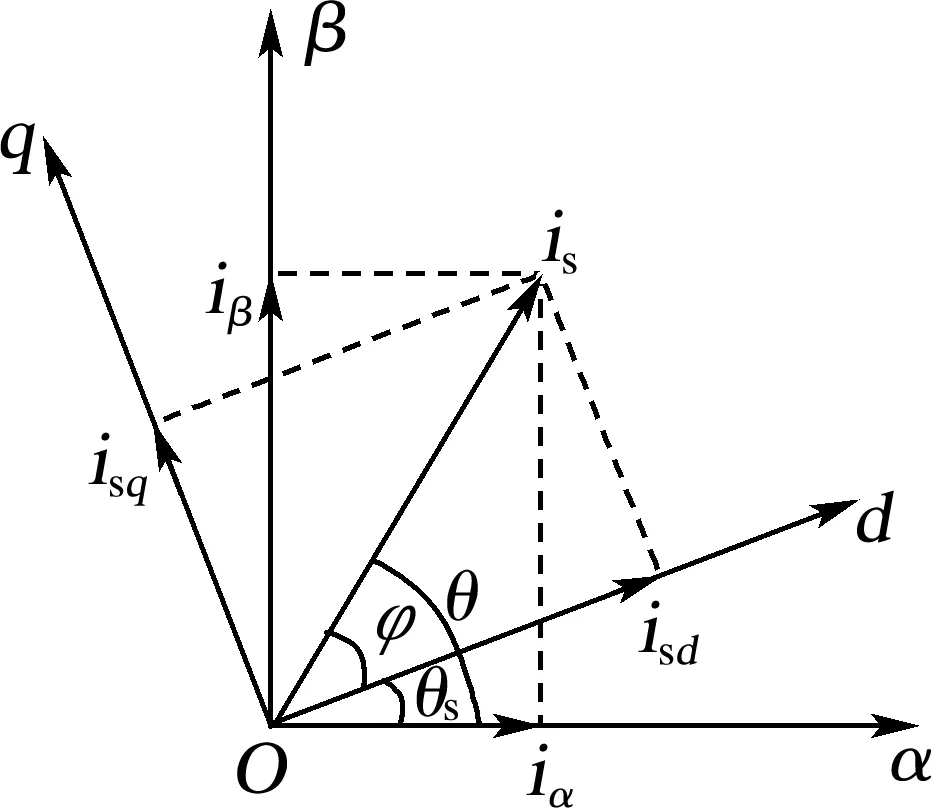
图4 负载电流矢量的空间位置
文献[1]和[14]中提到的基于功率因数角对输出电流方向预测法,也是利用求出电流矢量角,根据夹角的大小判断电流极性的。只是获取角度的方式不同,此方法还需要加入电压互感器和电

表1 θ与三相负载电流极性的对应关系表
流互感器测量电流和电压,再计算出功率因数角。具体求解过程见参考文献[1],此处不再过多叙述。此方法增加电压互感器、电流互感器和一个计算电量的芯片,硬件电路增多,且求出电流矢量角θ后,还需要再判断电流方向,计算过程复杂,使补偿的成本增加。
对于电流极性的检测目的要寻找到一种精确、简单、快速、经济的方法。下面提出一种优化方法。对检测到的电流信号通过坐标变换将电流从三相静止坐标系变换到同步旋转dq坐标系下,再用低通滤波器对id和iq进行滤波,经滤波之后的电流为交流基波电流转化而来的直流电流。与传统方法相比,优化方法不再像传统方法那样用反正切求出电流矢量与d轴夹角,再求出电流矢量在空间的位置角,最后根据电流矢量位置角与三相电流的极性关系判断三相电流的极性,而是通过式(5)与式(6)将滤波得到的旋转坐标系下直流电流转换成三相坐标系下的基波交流电流。根据式(7)得到三相交流电流可以直接判断三相电流的极性。
由两相旋转dq坐标系到两相αβ静止坐标系的变换矩阵为
(5)
幅值不变情况下,由静止正交坐标变换到三相静止坐标系矩阵为
(6)
则有
(7)
根据式(7)可直接判断三相电流的正负极性。其中负载电流在两相静止坐标系的分量iα、iβ与两相旋转坐标系的直流分量isd、isq间关系如图5所示,φ为旋转变换的变换角。
滤波之后的电流为旋转坐标系下的直流分量,然后,再次经过坐标变换,将旋转的dq坐标系下的直流电流分量反变换到abc三相静止坐标系下。此时得到的A、B、C三相电流和直接检测到的三相电流相比,已经将谐波滤除,只含有基波分量。因此,可以利用得到的基波分量直接进行极性判断。

图5 两相直角坐标系与两相旋转坐标系转换
Fig.5Transformationoftwophaserectangularcoordinatesystemandtwophaserotatingcoordinatesystem
优化的检测方法和传统的检测法相比,更容易理解,不但使计算量减少,而且减少了6个区间对三相电流极性的存储,减少了芯片的寄存器设置,模型简单,有助于增加检测电流极性的速率,可以对PWM波进行更加快速的修正。
3 仿真验证
为对三相SVPWM逆变电流进行检测,首先要搭建一带有死区设置的三相SVPWM逆变电路,对测得的电流信号分别利用不同电流极性检测的方法与本文提到的方法进行检测。
三相SVPWM逆变器输出相电压有效值为220V,频率为50Hz的交流电,死区时间设置为4μs,三相负载为10Ω电阻和10mH电感。则同步旋转坐标系的旋转角速度为100πrad/s。
为精确地从示波器中看到电流极性变化。设电流正极性方向输出为+1,电流负极性方向输出为-1。
以A相为例,直接取检测到的A相电流使其过零点判断其极性。如图6所示,将检测到电流波形与判断得到的极性在一个示波器中显示。从电流的波形可以看到,由于电流中谐波的存在,使电流出现抖动。
选取图6中一过零点处进行放大,如图7所示。从图中可以清楚地看到电流出现多个过零点,使得电流的极性在正极性(+1)和负极性(-1) 之间反复变化。
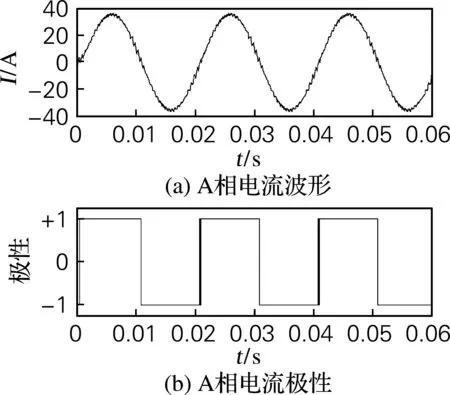
图6 直接检测时的电流及其极性图

图7 过零点处放大波形
利用提出的改进检测方法来处理检测到的电流,即将检测到的A相电流经过坐标变换、滤波、再坐标变换后,所得电流波形与其极性判断如图8所示。从图中可以看出,此时的电流正弦度已经很高,电流没有了抖动与毛刺;在过零点处,过零点唯一,也没有了极性的跳变。
在同一个模型仿真中,将检测得到的电流信号,同时利用电流矢量角判断极性和新方法判断极性,将这两种检测方法得到的A相电流极性波形在一个示波器中显示,如图9所示。
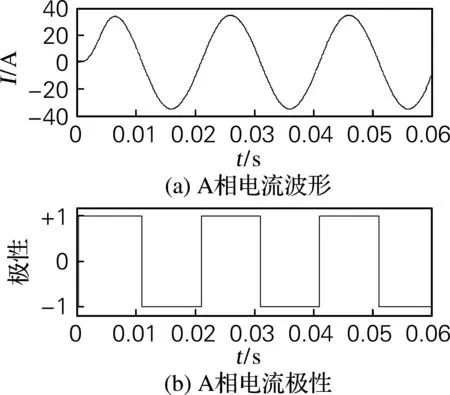
图8 新方法处理后电流波形及其极性图

图9 两种方法检测到的A相电流极性图
通过对两种检测方法检测到电流极性的比较,可以看出二者极性相同,证明所提的新方法能够正确检测出电流极性。此方法省去常用电流矢量角方法中的角度反函数计算和每个区间的极性选择环节,使得模型更加简单,容易理解,计算过程更迅速。
4 结 语
本文分析了空间矢量脉宽调制中由于死区时间的设置而造成逆变器输出电压、电流畸变,为对死区进行实时补偿,必须能够准确并且快速检测出负载电流极性。在常用电流矢量角间接判断电流极性方法的基础上,提出了一种改进的优化方法。最后,通过仿真验证了改进的方法可以准确地检测出电流极性,优化的方法还具有结构简单、计算量小等优点。
[1] 葛黄徐,杨仁刚,潘年安,等.基于功率因数角预测电流矢量的死区补偿方法[J].电力电子技术,2008,42(3):78-80.
[2] 张冀,徐科军.矢量控制电动执行器死区补偿新方法[J].电子测量与仪器学报,2015,29(2):272-281.
[3] 曹刚,徐凤星.基于双馈风力发电机的SVPWM死区时间补偿的DSP实现[J].电气传动自动化,2011,33(6):6-10.
[4] 徐凯.逆变器死区补偿中的一种提高三相电流极性检测精度的方法[J].仪器仪表用户,2006,13(5):150-151.[5] 孙向东,钟彦儒,段龙.基于定子电压矢量定向的死区补偿方法在通用型变频调速器中的应用[J].电气传动自动化,2003,25(2):1-2.
[6]JEONGSG,PARKMH,etal.Theanalysisandcompensationofdead-timeeffectsinPWMinverters[J].IEEETransactiononIndustrialElectronics, 1991, 38(2): 108-114.
[7]CHOIJW,SULSK.Inverteroutputvoltagesynthesisusingnoveldeadtimecompensation[J].IEEETransactiononPowerElectronics, 1996, 11(2): 221-227.
[8]SUKEGAVAT,KAMIYAMAK,MIZUNOK,etal.Fullydigitalvector-controlledPWMVSI-fedACdriveswithaninverterdead-timecompensationstrategy[J].IEEETransactiononIndustryApplications, 1991, 27(3): 552-559.
[9] 姜瑜,杨振强.基于DSP的死区效应补偿方法[J].仪器仪表学报,2006,27(6):873-874.
[10] 窦汝振,刘钧,温旭辉,等.SVPWM控制逆变器死区补偿方法的研究[J].电力电子技术,2004,38(6):59-61.
[11] 窦汝振,刘钧.一种基于SVPWM控制的死区补偿方法[J].电气传动自动化,2005,27(1):20-22.
[12] 许嘉旻,徐国卿,康劲松.基于永磁同步电机的SVPWM死区分析与补偿[J].电气传动,2007,37(2):29-31.
[13] 李新君,武铁斌.一种基于SVPWM的死区补偿策略[J].变频器世界,2010(5):77-80.
[14] 吴爱国,朴成洙,杨仁刚.SVPWM的简化算法以及死区补偿[J].电力电子技术,2001,45(7):72-74.
Current polarity detection in dead time compensation of SVPWM inverter
ZHANGZhan,GAOZhaoyang
( School of Electrical Engineering and Automation, Henan Polytechnic University, Jiaozuo 454000, China )
ThedeadtimecompensationofSVPWMinverterwasanalyzed.Amethodforcurrentpolaritydetectionwasproposedtosolvetheproblemthatthecurrentpolaritycannotbeaccuratelyjudgedbecausethecurrentcontainsharmonicsdistorted.Comparedwiththecompensationmethodthatusingcurrentvectorangletojudgethepolarityofthreephasecurrent,thismethodwasmoresimpleandeasytoimplementandin-needoflesscalculation.Thecorrectnessofthismethodwasprovedbysimulation.
inverter; compensation; polarity
2016-05-17.
张 展(1976-),女,副教授.
TM46
A
1674-1404(2016)05-0386-05
张展,高照阳.SVPWM逆变器死区补偿中的电流极性检测[J].大连工业大学学报,2016,35(5):386-390.
ZHANG Zhan, GAO Zhaoyang. Current polarity detection in dead time compensation of SVPWM inverter[J]. Journal of Dalian Polytechnic University, 2016, 35(5): 386-390.
猜你喜欢
电工技术学报(2022年20期)2022-10-29
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
微电机(2022年1期)2022-03-21
时代英语·高一(2019年5期)2019-09-03
天然产物研究与开发(2018年9期)2018-10-08
通信电源技术(2018年3期)2018-06-26
科技创新与应用(2017年1期)2017-05-11
航空兵器(2016年5期)2016-12-10
天然产物研究与开发(2016年1期)2016-06-05
客车技术与研究(2015年3期)2015-08-24
