
一种基于背景差分算法的实时运动检测跟踪系统的设计
2016-10-31 21:00龚鼎曹广忠
电脑知识与技术 2016年22期
龚鼎+曹广忠


摘要:本文提出一种基于回归型背景差分算法的实时运动检测跟踪系统的设计。通过载入摄像头实时图像与建立好的背景模型进行差分运算,并对差分运算的结果进行连通域分析,检测出运动物体与摄像头的相对位置并实时准确跟踪。实验结果表明,该文设计的实时运动检测与跟踪系统,能够达到实时的、准确的、跟踪目标。
关键词:背景差分算法;连通域分析;运动检测
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2016)22-0207-03
随着计算机技术、通信技术、图像处理技术的不断发展,运动目标检测在智能交通流量检测、商用安防检测、模式识别等场合的作用越来越重。运动检测是运动图像分析、智能监控、可视人机交互中的重要处理步,通过运动检测可以得到图像中的运动信息,提取图像中的运动人物或目标,然后进行定位跟踪,在需要安全防范的应用场合下具有十分重要的意。
针对这个问题,本文设计了一种利用回归型背景差分算法进行实时运动检测与跟踪的系统。不同于对已存储视频的分析,系统直接对摄像头输出的当前帧进行分析处理,首先建立一个可靠的背景模型,然后载入摄像头的实时帧图像,对背景图像和当前帧进行初步处理后通过差分算法得到完整可靠的运动目标图像,最后用形态学滤波进行后处理,以消除噪声和背景扰动带来的影响,最后通过对连通域分析将当前视频中的运动目标检测出来并实时跟踪达到实时检测跟踪的目的,提高了实时性。
1系统概述
本系统模拟实际应用场合,系统硬件采用中博斯科技USB摄像头模组,型号XC2440,广角120度。系统软件采用在32位Windows10系统上运行的matlabR2011b。整体由固定位置的摄像头和基于matlab的图像处理程序组成,程序分为图像载入,背景模型建立,差分运算预处理,灰度处理,二值化分析,差分运算结果连通域分析,运动检测与跟踪,背景模型更新等过程,同时设计了一个交互方便的GUI,对数据监测和数据处理流程进行全方位的展示。界面设计如图1。设计了四个axes,左上角为preview,主要显示当前摄像机拍摄到的画面;右上角为Detection_minus,主要灰度处理、二值化和图像差分等操作后的图像实时显示;左下角为camera,主要用于显示读入的图片数据、拍摄照片后的图片数据;右下角为figure_centeroid,主要用于画出检测到的运动物体的质心相对于坐标轴的坐标位置。
2整体设计
2.1实时图像预处理
在MATLAB中采用videoinput命令读取USB摄像头数据保存到一个类中,将图像帧从YUV模式转为RGB颜色表显示。通过get函数将类中的图像数据读出,用image函数转存为图像。由于RGB是三维数据,不能直接进行差分运算,需要预先使用RGB2GRAY函数将RGB图像转为灰度图,彩色图像的像素色为RGB(R,G,B),灰度图像的像素色为RGB(r,r,r),R、G、B 可由彩色图像的颜色分解获得。R、G、B的取值范围为 0-255,所以灰度的级别只有 256 级。灰度化的处理方法主要采用加权平均值法:根据某个指标例如重要性给 R、G、B 赋予不同的权值,并使 R、G、B 等于它们的值的加权和。
即: R=G=B=(R*WR+G*WG+B*WB)/3 (2-1)
其中,WR,WG,WB分别是 R、G、B 的权值。由于人眼对绿色的敏感度最高,对红色的敏感度次之,对蓝色的敏感度最低,研究表明,当 WR=0.30,WG=0.59,WB=0.11 时,可以得到由彩色图像转换过来的最合理的灰度图。转化为灰度图像后再使用im2bw函数将图像转化为二值化图像。
2.2回归型背景差分算法
根据建立的背景模型是否具有自适应更新的功能,可以将背景建模划分成非回归型和回归型两。非回归型是预先根据若干帧图像的数据恢复出背景,这类方法运算速度较,而且对于后续的处理较为简便,缺点是不能适应后续图像中背景的渐变。回归型则是根据每次输入的图像更新背景模型,这种方法能够适应背景的渐变,排除光照等因素对检测结果造成的影。
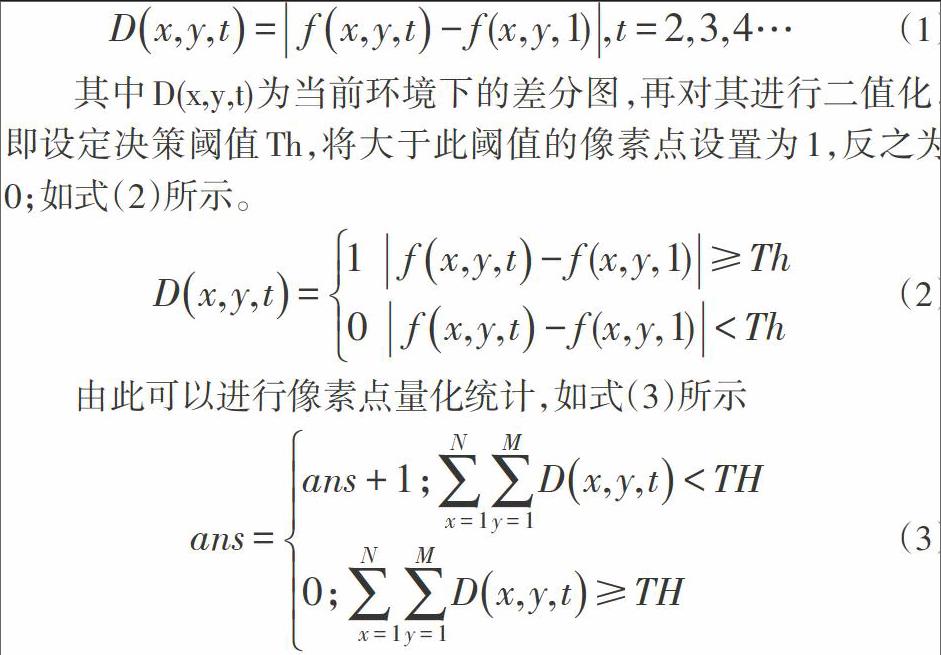
假设摄像机输出图像转为灰度图后为f(x,y,t),其中t表示帧数,将t=1时设置为初始的背景模型,即f(x,y,1);任意时刻的图像为f(x,y,t),背景差分算法则是将图像模型进行(1)运.
其中D(x,y,t)为当前环境下的差分图,再对其进行二值化,即设定决策阈值Th,将大于此阈值的像素点设置为1,反之为0;如式(2)所示。
由此可以进行像素点量化统计,如式(3)所示
其中TH 为二值化后图像总像素点的阈值量TH,当总像素和小于TH时即表示此时处于背景模型状态中,对ans 进行连续计数,如式(4)所示,当ans大于一定程度时,即表示此时的图像长期不变可,此时可更新背景模型减小光照强度变化等对差分算法的影响,其中T为当前帧的像素图 。
根据背景差分算法的,对图像处理的流程进行细致分析,具体流程图如图4所示。
2.3形态学滤波
差分检测之后,由于当前环境的光强的微弱变化和摄像机位置的微弱震动都会导致差分之后的图像的噪声出现,此时就需要对差分之后的图像镜像形态学。因此,为了去除一些噪声,使用开运算,在MATLAB函数库中,可直接用imopen进行开运算,先腐蚀后膨胀,可以去除隔离的噪点和小桥连接处等。设定形态学滤波元素为半径为2像素的。开运算之后,使用bwareaopen删除面积小于200的对象。
2.4实时运动物体检测
形态学滤波后,程序流程进行到了多运动目标连通区域的识别,多运动目标连通区域的质心和面积的提取,当判断为运动物体时,对最大面积的连通区域的质心在当前帧图像上进行矩形框标记。读取滤波后的图像数据,利用regionprops函数进行连通区域处理。Regionprops是用来度量图像区域属性的函数,常用来统计被标记的区域的面积分布,显示区域。利用max函数,取出最大面积的块的面积参数和质心参数,判断当前最大面积的块的面积参数是否达到被检测物体的阈值,记录其质心,利用MATLAB中的矩形函数在预览画出以质心为中心的矩形框,并利用MATLAB的plot函数坐标轴中画出此时被检测运动物体的坐标位置。完成实时运动物体的检测。
3实验结果及分析
将一个圆形物体从画面中以4cm/s,如图6所示,在差分结果框中显示了差分效果图,由连通域面积分析法可知当前画面包含运动物体,于是如图5中所示,在preview中将物体的运动轨迹检测并跟踪,达到了实时运动物体检测与跟踪的要求。运动检测查分效果图如6所示。
为检测系统的实时性,建立一个单摆模型帮助检测,在摄像头前放置一个自然下垂的圆形物体,让其自然下垂于摄像头前,通过控制单摆的起摆角度来控制运动物体的速度。观察不同角度下的检测与跟踪效果。本文对30度时的情况进行检测分析。
当角度为30度时,由于单摆的运动特性,即运动到最低点时速度最大,运动到最高点时速度最小,理论上左右两边的运动检测点将比中线的运动检测点多且密度较大。如图7和图8所示,由检测效果图可得,该系统对30度时的单摆检测效果良好,清晰的检测并跟踪了运动物体的运动状态和坐标。
4结论
本文针对目前广泛的视频运动物体检测,提出了一种实时运动物体检测与跟踪的方法,不同对视频的检测分析,该方法从摄像头初始帧中实时读取当前摄像头数据;利用回归型背景算法实时更新背景;通过差分运算的结果进行连通域分析进而完成运动物体的检测与跟踪;从数据源中增加了运动物体检测的实时性,达到了实时检测并跟踪的要求;同时设计了交互方便GUI界面,可对运动物体检测与跟踪的处理流程和其涉及的重要参数进行全方位展示,具有一定的适用价值。
参考文献:
[1] 苑晶,刘钢墩.激光与单目视觉融合的移动机器人运动目标跟踪[J].控制理论与应用,2016(2).
[2] 於正强,潘赟.一种结合帧差法和混合高斯的运动检测算法[J].计算机应用与软件,2015(4).
[3] 刘晓悦,孟研.运动目标检测与跟踪算法的研究[J].河北联合大学学报(自然科学版),2015(1).
[4]陈钢,李鸿燕.基于运动检测的自适应降噪算法及的实现[J].上海工程技术大学学报,2015(6).
[5] Jia Yubo,Xia Guanghu,Zhang Qian,et al.An Improved Apriori Algo-rithm Based on Association Analysis[C]//Proceedings of 2012 Third International Conference on Networking and Distributed Computing,2012: 208-211.
[6] KONDAXAKIS P, BALTZAKIS H, TRAHANIAS P. Learning moving objects in a multi-target tracking scenario for mobile robots that use laser range measurements [C] //Proceedings of IEEE/RSJ Inter-national Conference on Intelligent Robots and Systems. St. Louis, USA: IEEE, 2009: 1667–1672.
[7]张星明.视频图像捕获及运动检测技术的实现[J].计算机工程,2002(7).
[8] Shi Jian bo,Carlo tomasi. Good features to track[C]//Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (CVPR94),USA,1994: 593-600.
[9] 甘玲,赵华翔.一种改进的Vibe算法结合多特征融合的阴影移除方法[J].微电子学与计算机,2015(7).
[10]李毅,孙正兴.一种改进的帧差和背景减相结合的运动检测方法[J].中国图象图形学报,2009(8).
[11]刘晓悦,孟研.运动目标检测与跟踪算法的研究[J].河北联合大学学报,2015(6).
[12] 管飞,王荣.基于Horn-Schunck光流法的运动目标检测的研究[J].仪表技术,2015(8).
