高效显式模型预测控制在两容水箱中的应用
2016-10-31 09:15:02王宇红
计算机测量与控制 2016年4期
杨 璞,王宇红
(中国石油大学(华东)信息与控制工程学院,山东 青岛 266580)
高效显式模型预测控制在两容水箱中的应用
杨璞,王宇红
(中国石油大学(华东)信息与控制工程学院,山东 青岛266580)
针对一类具有分段仿射形式的混杂系统模型的控制方法问题,提出了一种高效显式模型预测控制算法;该算法通过将最优控制问题转化为多参数规划问题,离线求得具有分段仿射形式的显式控制器;在线过程,应用一种新的搜索算法,它能够快速准确地对系统状态点进行定位,确定其所属的控制器分区,再根据该分区所对应的子控制率,进行简单的线性运算,即可得到系统的输入;该控制方法避免了反复的在线优化计算,大大减少了计算量,并且,在线计算的速度更快,控制的实时性更好;将该算法应用到具有典型混杂特性的两容水箱系统中,仿真结果表明:水箱的液位从初始液位能够快速平稳的达到期望的液位,且与其它的控制算法相比较,该算法更加高效。
分段仿射模型;显式模型预测控制;在线计算;两容水箱
0 引言
混杂系统是指包含连续动态和离散动态两种特性,并且两种动态相互作用的一类系统,对该类系统的研究被IEEE控制协会称为是具有广泛应用前景的研究。分段仿射(PWA)模型是一类重要的混杂系统模型,它不仅能够很好的反应系统的混杂特性,而且等价于多类混杂模型,如混合逻辑动态模型(MLD),线性互补模型(LC),极大极小模型(MMPS)等[1]。
针对PWA模型的控制方法的研究也是研究的热点。文献[2]中,提出采用模型预测控制的方法,但是该方法需要不断在线求解优化问题,导致计算量过大,消耗了大量时间。文献[3-4]中,提出采用显式模型预测控制的方法,可以有效解决这一问题,它通过离线求解优化问题,得到系统状态与输入的显式关系,即显式控制器,那么在线计算只需要先确定系统当前状态在控制器分区的位置,再进行简单的线性运算即可。
显式模型预测控制中,在线计算过程需要不断的对控制器的分区进行搜索,以确定系统当前状态属于哪个分区,如果采用合适合理的搜索算法,则可以大大节省在线计算时间。文献[5]中,通过对控制器分区进行可达性分析,缩小了搜索范围,节省了搜索时间;文献[6-9]中,通过将分段仿射形式控制率表示为“树”型结构,可以快速的完成在线计算;文献[10-12]中,通过对控制器分区进行简化,提高了搜索效率。但是这些算法大都需要复杂的数据预处理过程,本文提出了一种距离比较查找法,它不仅对控制器分区数据的预处理过程十分简单,而且可以大大提升在线计算速度。
本文首先介绍了PWA模型,然后对基于PWA模型的显式模型预测控制的离线计算和在线计算过程进行了详细的研究,最后,将该控制方法应用到具有典型混杂特性的水箱系统中。
1 PWA模型
PWA模型是一类典型的混杂系统模型,它包含有限个连续变量动态子模型,随着系统状态的不断演化,系统根据切换律在不同模态之间进行切换,其表达式为:
y(k)=Cix(k)+Diu(k)+gi
2 基于PWA模型的显式模型预测控制
针对PWA模型的显式模型预测控制算法分为离线计算和在线计算两个部分,其基本思想是将模型预测控制算法与多参数规划理论相结合,通过离线求取显式控制器,在线计算时,只需根据求得的控制器,对状态点进行定位和简单的线性运算即可。
2.1离线计算
考虑如下有限时域最优控制(CFTOC)问题:

(1)

根据贝尔曼最优化原理,问题(1)可以等价的表示为一个动态规划问题[4,15]:

(2)

subj.toCrr≤Cxx+Cc
其中:x∈Rnx是参数向量,r∈Rnr是决策向量,并且Cx∈Rnc×nx,Cr∈Rnc×nr,Cc∈Rnc,f∈Rnr。
根据文献[4],通过对上述多参数线性规划问题求解,可以得到分段仿射形式的显式控制率:

2.2在线计算
在线计算时,只需要先确定当前时刻系统状态在控制器分区的位置,再根据与该分区对应的子控制率,进行简单的线性运算,即可得到当前时刻的输入。不难看出,在线计算的关键是是否能够快速准确的确定系统状态在控制器分区的位置,这实质上是一个“点定位”问题。
解决“点定位”问题最直接的方法是采用顺序查找法,即从控制器中编号为1的分区开始查找,根据分区表达式,确定当前系统状态是否属于该分区,直到找到该状态点所属的分区或判断完最后一个分区为止。顺序查找法的具体过程如算法1所示,这里假设显式控制器有N个状态分区,第i(i≤N)个状态分区表达式为Ri={x|Hix≤Ki},Hi、Ki分别为nRi×nx、nRi×1维的矩阵,其中nRi表示组成该分区的超平面个数。
算法1:
1)检测当前时刻系统状态x(k)。
2)依次查找第i(i=1,…,N)个分区,若满足Hix≤Ki,则x(k)∈Ri,否则,继续查找。

顺序查找法最坏的情况需要对每一个分区进行查找,对于控制器存在大量分区的情形,是十分不利的。本文根据2.1节求得的显式控制器分区是由若干个凸多面体组成,并且它们互不相交的特点,提出了一种距离比较查找法,可以更高效的解决“点定位”问题。
如图1表示一个二维的凸多面体,如果一个圆心为c,半径为r的圆包含于该多面体内,并且,在多面体的所有点中,距离c最远的点与c的距离为d,那么,只要与c的距离小于r的点,一定属于该多面体,只要与c的距离大于d的点,一定不属于该多面体。
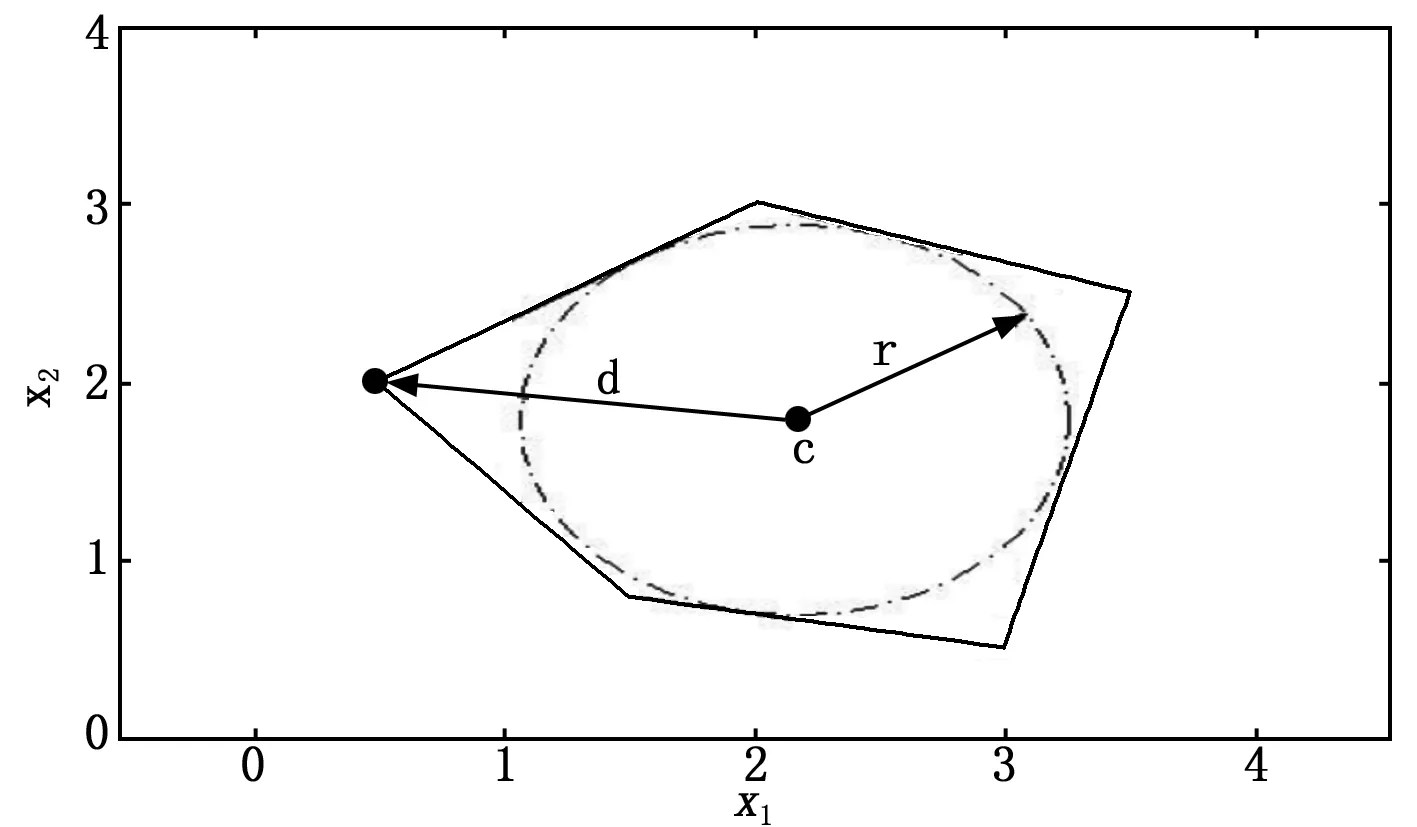
图1 二维凸多面体
根据上述思想,运用距离比较查找法时,首先需要在n维控制器的每个状态分区中,寻找一个包含于该分区的最大的球体。这里仍然用Ri={x|Hix≤Ki}表示控制器的第i(i≤N)个多面体分区,在该分区中,假设需要寻找的球体的圆心为xci,半径为ri,考虑下式中的优化问题:
(3)

以上运算均可以离线完成,那么在线查找时,只需要依次求取系统当前时刻状态x(k)与控制器第i个分区的球心之间的距离ci,同时,比较ci与ri的大小,当ci≤ri时,说明x(k)∈Ri,查找结束;当ci>ri时,需要再比较ci与di的大小,当ci>di时,说明x(k)不在该分区中,需要继续查找下一个分区,当ci≤di时,则说明x(k)可能在该分区中,存储该分区。当查找完最后一个分区仍未找到x(k)所属的分区时,则在之前存储的分区中,再采用顺序查找法查找。距离比较查找法的具体过程如算法2所示。
算法2:
1)离线求取B(xci,ri)和di(i=1,…,N)。
2)检测当前时刻系统状态x(k)。
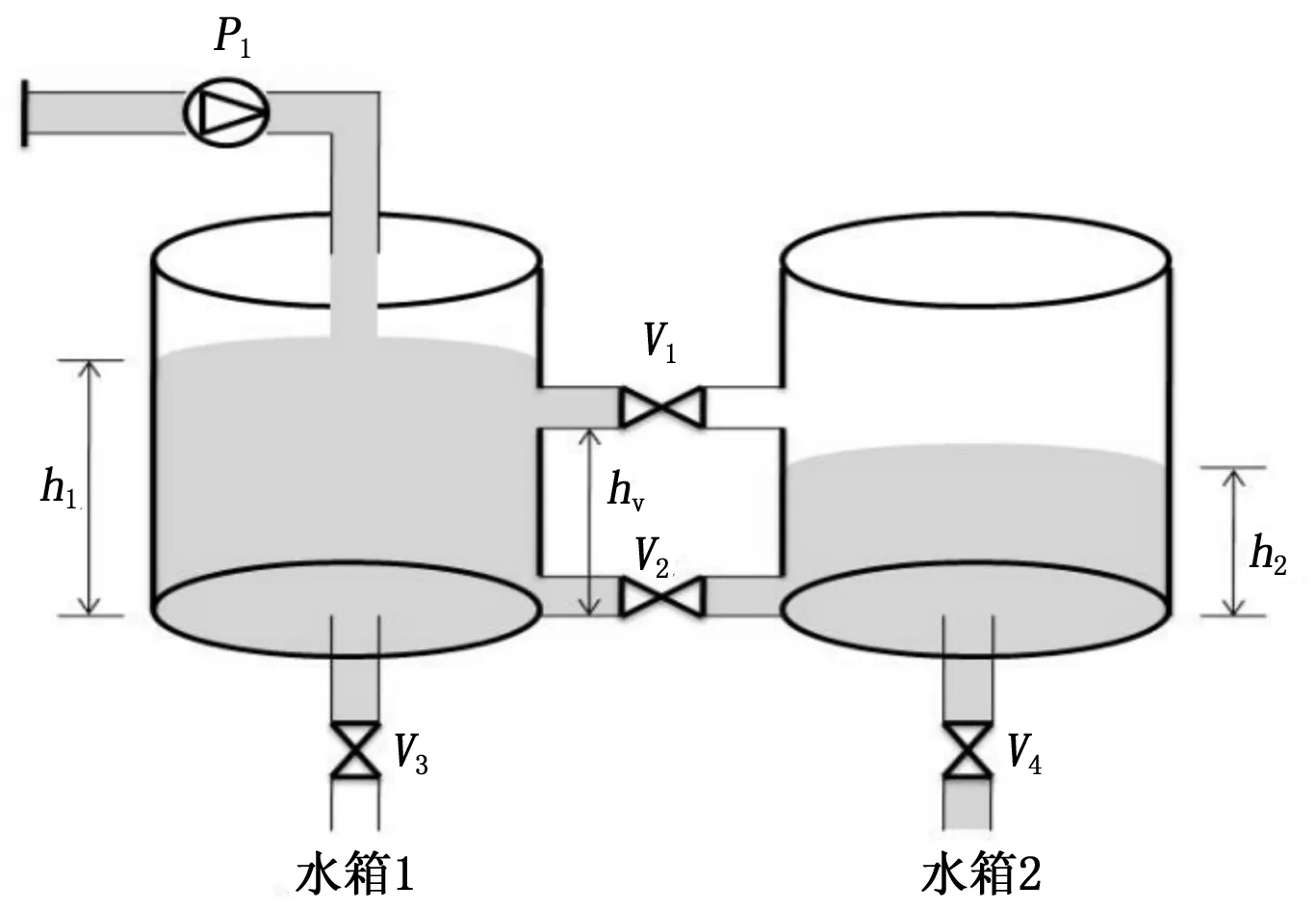
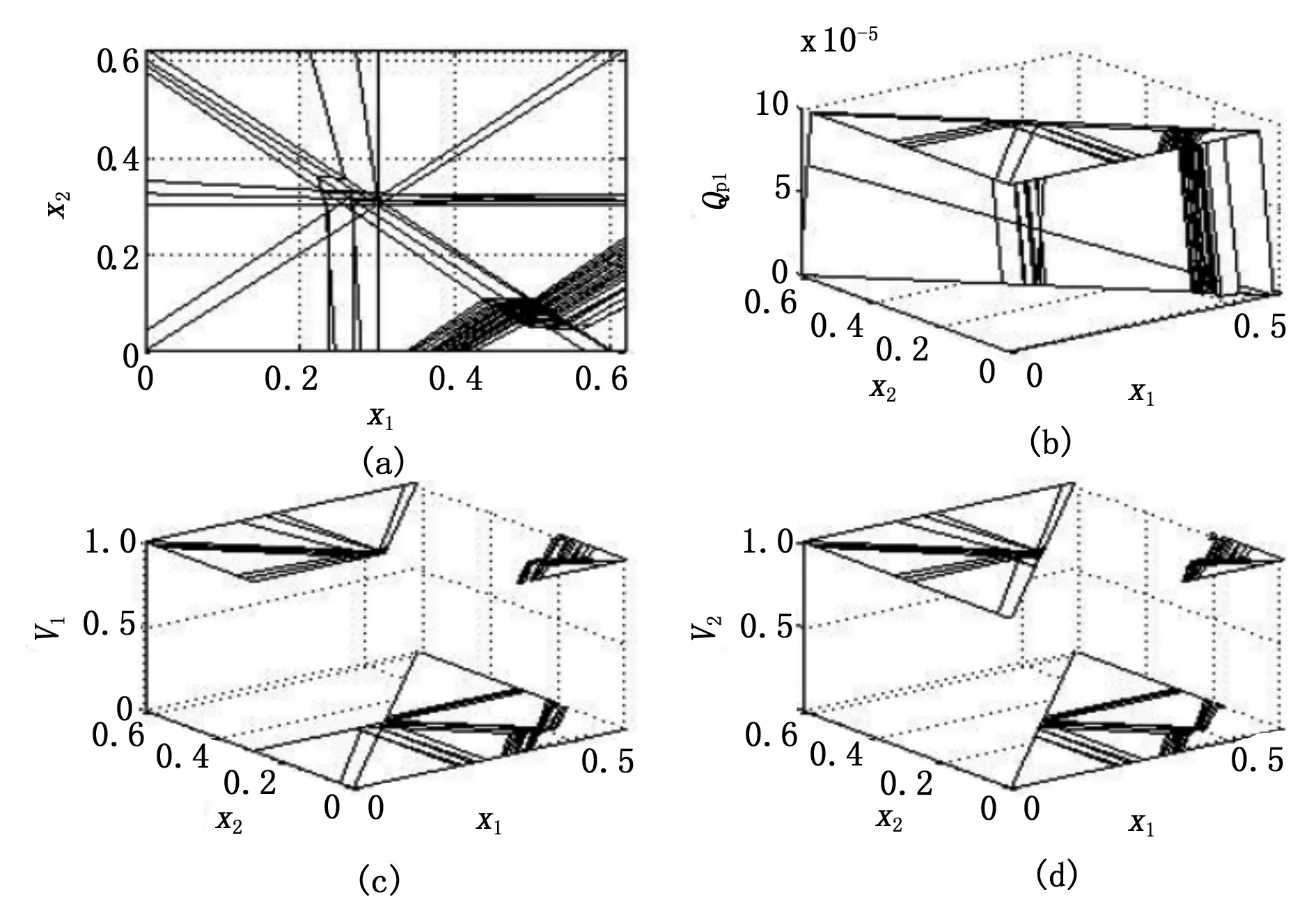
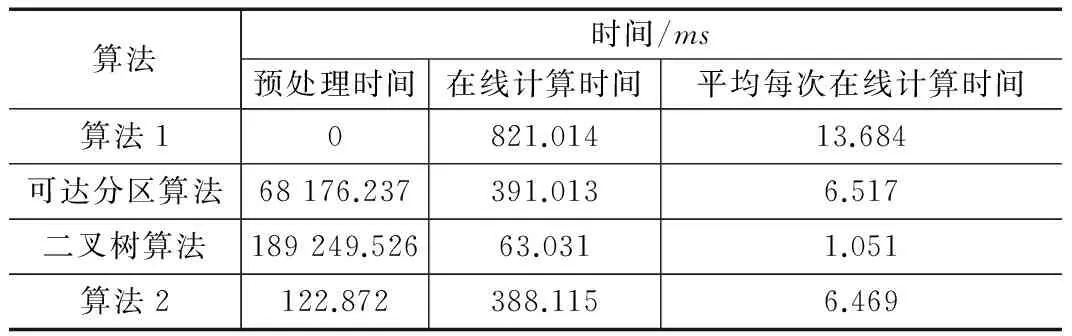
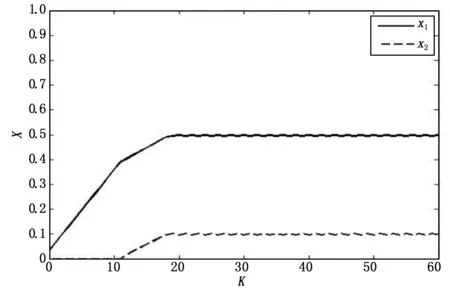
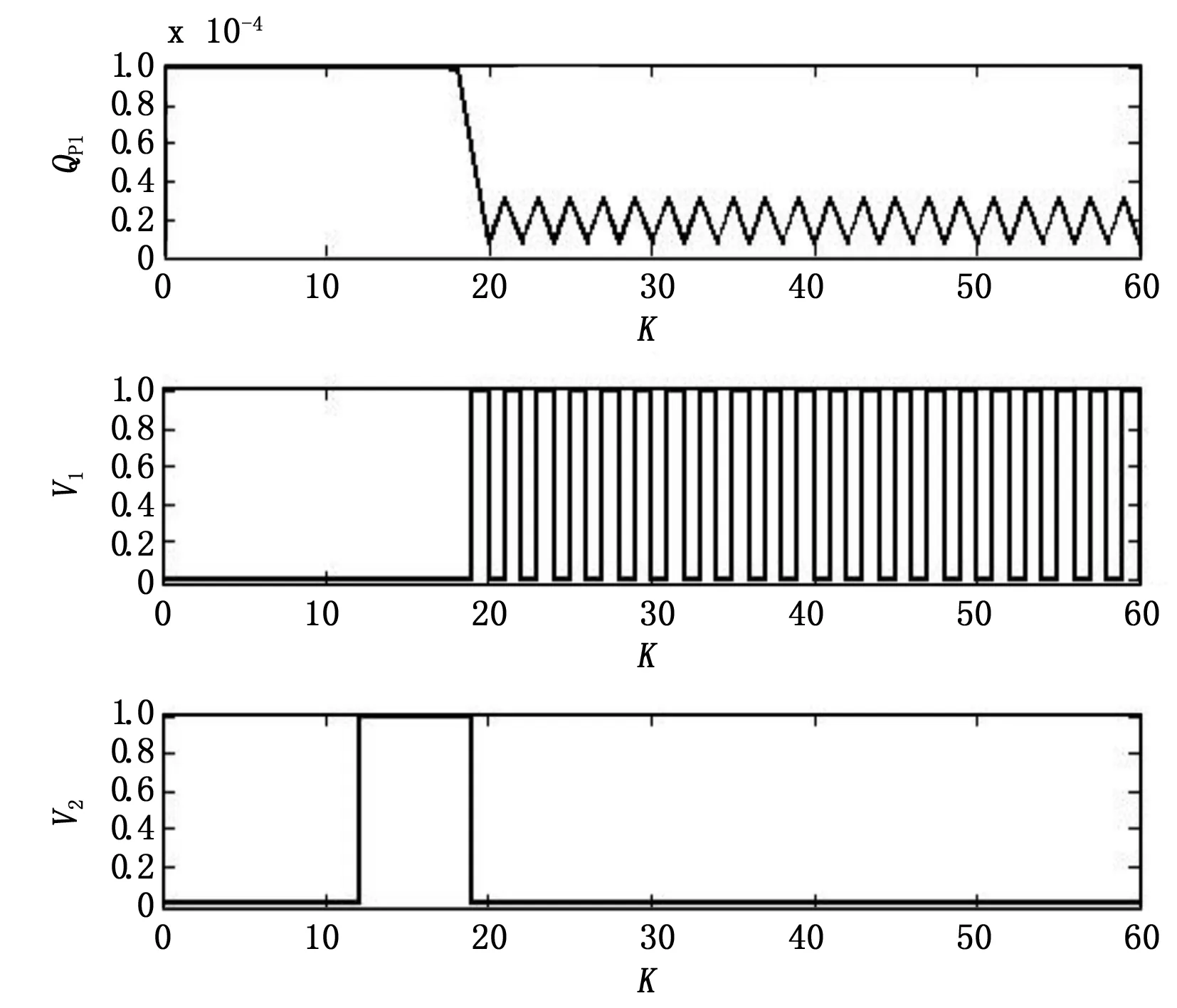
3)当i=1时,求取x(k)与xc1之间的距离c1。若c1≤r1,则x(k)∈R1,跳转到步骤5;否则,若d1 4)若i 5)若查找结果为x(k)∈Ri,则根据该分区所对应的子控制率u*(k)=Fix(k)+Gi,即可计算出系统的输入。否则,该状态不在控制器分区内。 对于显式模型预测控制在线计算过程,如果控制器的分区数为N,组成第i个分区的超平面的数量为n(i),运用算法2解决“点定位”问题,若只考虑在线查找过程,一般情况下,只需要在每个分区中进行1次范数运算,2次比较运算即可;在最差的情况下,需要进行1次范数运算,2+n(i)次比较运算,然而,当控制器存在大量分区时,发生这种情况的分区的比例是较小的。而运用算法1则需要在每个分区中进行n(i)次矩阵运算,n(i)次比较运算,特别的,当控制器的维数较高时,n(i)≥2。 从这方面来说,算法2能够减少在线计算量,从而使控制更高效。 3.1两容水箱的PWA模型 对水箱系统的研究,已经作为一个研究的标准问题(BenmarkProblem),被广泛的应用于混杂系统研究成果的验证中。两容水箱是一类重要的水箱系统,如图2所示,在实际对象中,各参数的意义和具体数值见表1。 图2 两容水箱 它由水箱1和水箱2两个水箱组成,流经它们之间的液体通过V1、V2两个阀门进行控制,流出水箱的液体可以通过V3、V4两个阀门进行控制,V1、V2、V3、V4均为开关型阀门,水箱1有连续输入泵P1,输入量记为QP1(0≤QP1≤Qmax)。若将阀V3常闭,阀V4常开,则可得到系统的模型为: 表1 两容水箱参数 其中:各流量表达式分别为: Q1=V1·az·S1·sign(max{h1,hv}-max{h2,hv})· 再将该线性连续模型离散化,令 得到: 若选择h1、h2作为系统的状态变量x(k)∈[0,0.62]×[0,0.62],Qp1、V1、V2作为系统的输入U(k),并将参数值代入,那么即可得到两容水箱的PWA模型,它共有16子系统模型组成。 3.2仿真结果与分析 本文的控制目标是使水箱从初始液位状态x(k)=[00],在系统输入U(k)的作用下,能够达到期望的液位状态x(k)=[0.10.5]。采用显式模型预测控制算法对系统进行控制,通过离线计算得到的显式控制器如图3所示。 图3 显式模型预测控制器 图中,(a)表示控制器的分区,它共有29个不同的子控制率分布在371个状态分区上,(b)、(c)、(d)表示系统输入Qp1、V1、V2分别在控制器分区上对应的线性连续控制率。根据得到的显式控制器,在线计算分别采用算法1、可达分区算法[5]、二叉树算法[6]、算法2求取系统最优输入值,若选取K=60(表示60个采样时间),4种算法对比见表2。 表2 在线计算算法对比 表2中,可达分区算法、二叉树算法和算法2均需要对分区数据进行离线预处理,算法2用时分别是其他两种算法的0.18%和0.065%;完成在线计算过程,算法2用时比算法1用时减少了430.001ms,与可达分区算法用时相当,但是比二叉树算法用时长。需要指出的是二叉树算法虽然在线计算用时最短,但是,该算法预处理时间过长,当控制器存在大量分区时,可能使预处理过程变为NP-hard问题;算法1虽然不需要预处理过程,但是,在线计算用时过长;综合考虑,这里选择算法2作为在线计算算法。得到系统的状态和输入随时间的演变过程曲线如图4,图5所示。 图4 系统状态演变曲线 图5 系统的控制输入演变曲线 图中,水箱的液位在控制输入的作用下,能够快速平稳的达到设定的液位,并在该液位附近微小波动,这是由于两容水箱在该稳态存在极限环所导致的。 本文介绍了基于PWA模型的显式模型预测控制算法,针对该算法的在线计算过程,提出了一种距离比较查找法,并且应用到了对两容水箱控制的研究中。仿真结果表明,水箱液位从初始液位,能够快速平稳的达到期望的液位,并且在线计算过程中,采用距离比较查找法比其它3种算法能够更高效的得到系统输入值。 [1]HeemelsWPMH,SchutterBD,BemporadA.Equivalenceofhybriddynamicalmodels[J].Automatica,2001,37(7):1085-1091. [2]BemporadA,MorariM.Controlofsystemsintegratinglogic,dynamics,andconstraints[J].Automatica,1998,35(98):407-427. [3]BemporadA,MorariM,DuaV,etal.Theexplicitlinearquadraticregulatorforconstrainedsystems[J].Automatica,2002,38(1):3-20. [4]BaoticM,ChristophersenFJ,MorariM.Anewalgorithmforconstrainedfinitetimeoptimalcontrolofhybridsystemswithalinearperformanceindex[A].ProceedingsofEuropeControlConference[C].Cambridge,UnitedKingdom,2003:3335-3340. [5]SpjotvoldJ,RakovicSV,TondelP,etal.UtilizingReachabilityAnalysisinPointLocationProblems[A].ProceedingsofIEEEConferenceonDecisionandControl[C].SanDiego,USA,2006:4568-4569. [6]TøndelP,JohansenTA,BemporadA.EvaluationofPiecewiseAffineControlviaBinarySearchTree[J].Automatica,2002,39(5):945-950. [7]ChristophersenFJ,KvasnicaM,JonesCN,etal.Efficientevaluationofpiecewisecontrollawsdefinedoveralargenumberofpolyhedra[A].ProceedingsoftheEuropeanControlConference[C].Kos,Greece,2007:2360-2367. [8]MönnigmannM,KastsianM.Fastexplicitmodelpredictivecontrolwithmultiwaytrees[A].Proceedingsof18thIFACWorldCongress[C].Milano,Italy,2011: 1356-1361. [9]BayatF,JohansenTA,JalaliAA.FlexiblePiecewiseFunctionEvaluationMethodsBasedonTruncatedBinarySearchTreesandLatticeRepresentationinExplicitMPC[J].IEEETransactionsonControlSystemsTechnology,2012,20(3):632-640. [10]GeyerT,TorrisiFD,MorariM.Optimalcomplexityreductionofpolyhedralpiecewiseaffinesystems[J].Automatica,2008,44(7): 1728-1740. [11]KvasnicaM,FikarM.Clipping-BasedComplexityReductioninExplicitMPC[J].IEEETransactionsonAutomaticControl,2012,57(7):1878-1883. [12]StevekJ,KvasnicaM,FikarM.Towardsadominant-polytopecomplexityreductioninexplicitMPC[A].ProceedingsofInternationalConferenceonProcessControl[C].strbsképleso,SlovakRepublic,2013:124-129. [13]FuchsAN,JonesCN,MorariM.Optimizeddecisiontreesforpointlocationinpolytopicdatasets-applicationtoexplicitMPC[A].ProceedingsofAmericanControlConference[C].Baltimore,USA,2010:5507-5512. [14] 席裕庚,李德伟,林姝. 模型预测控制——现状与挑战 [J]. 自动化学报,2013,39(3):222-236. [15]Bertsekas,DP.DynamicProgrammingandOptimalControl[M],Massachusetts:AthenaScientific,1996. [16] 王琳,张根宝. 自抗扰控制器在双容水箱中的应用[J]. 计算机测量与控制,2013,21(3):775-778. Application of Efficient Explicit Model Predictive Control in Two Tank System Yang Pu,Wang Yuhong (College of Information and Control Engineering,China University of Petroleum (East China),Qingdao266580,China) An efficient explicit model predictive control algorithm is proposed for a class of hybrid systems based on piecewise affine (PWA) model. The algorithm solves the optimization problem off line by transforming it into an equivalent multi-parameter programming problem and therefore obtains an explicit controller with piecewise affine form. For on-line process,a new search method is used to determine the position of the system state in the partitions of the controller and gets the optimal input according to the control law corresponding to the partition via evaluating a simple linear function. The algorithm greatly reduces the computation complexity. Moreover,it leads to higher computation speed and better real-time performance. Finally,an application case study on two tank system is given to illustrate this method and the simulation results show that it is more efficient comparing with other algorithms. PWA model;explicit model predictive control;online computation;two tank system 1671-4598(2016)04-0071-04DOI:10.16526/j.cnki.11-4762/tp.2016.04.022 TP273 A 2015-09-24; 2015-11-02。 国家自然科学基金资助项目(61403420);山东省自然科学基金资助项目(2013ZRE28089)。 杨璞(1989-),男,河北涿州人,硕士研究生,主要从事先进控制理论与技术的研究。 王宇红(1970-),男,河北新乐人,教授,硕士研究生导师,主要从事预测控制、化工自动化的研究。3 仿真实例


4 结论
猜你喜欢
防爆电机(2021年4期)2021-07-28 07:42:46中国特种设备安全(2021年11期)2021-05-05 06:13:18铁道通信信号(2020年6期)2020-09-21 09:23:34测控技术(2018年9期)2018-11-25 07:45:00石油化工自动化(2018年5期)2018-11-14 02:34:30中成药(2018年2期)2018-05-09 07:20:09电子制作(2017年19期)2017-02-02 07:08:50工业设计(2016年11期)2016-04-16 02:49:22小雪花·成长指南(2015年10期)2015-10-23 08:37:37汽车维护与修理(2015年2期)2015-02-28 12:15:41