船载水样自动采集系统
2016-10-31 01:34:34司惠民
海洋学研究 2016年3期
李 超,司惠民*,关 一,于 灏
(1. 国家海洋技术中心,天津 300112; 2. 国家海洋局 北海海洋技术保障中心,山东 青岛 266033)
船载水样自动采集系统
李超1,司惠民*1,关一1,于灏2
(1. 国家海洋技术中心,天津 300112; 2. 国家海洋局 北海海洋技术保障中心,山东 青岛 266033)
为了适应我国近海海洋环境监测快速、多要素的现场监测需求,研制了一套船载水样自动采集系统,系统控制方式简单灵活,具有全自动、半自动和手动三种控制模式。该系统由采水泵、复合采水缆、电动绞车、电控柜、储水罐等硬件和控制软件组成。在软件的控制下,绞车、采水泵等执行元件可自动开启和关闭,自动完成同一地点不同深度的多层水样采集。与传统人工采水方式相比,可大大减轻实验人员的劳动强度,减小水样采集的深度误差。渤海和东海大量的海上试验证明该系统性能稳定,能够适用于营养盐分析仪对水样的要求。
海洋环境监测;船载;水泵;自动采样
0 引言
海洋蕴藏着丰富的资源,海洋开发带来了巨大的经济效益,但同时也带来了日益严重的环境问题,特别是近岸海洋环境面临着越来越大的压力[1]。随着国家对海洋的重视,建立了众多的海洋环境监测系统。其中海洋水质监测主要有2种方法:一是通过现场传感器测定,二是取样后在实验室内使用相应仪器设备进行分析。由于技术方面原因,很多参数还不能通过现场传感器测定,实验室分析依然是环境监测的重要手段[2]。
传统的手动采水器,如南森瓶等,为悬挂在钢丝绳上并由绞车投放水中的采水瓶。投放水中的采水瓶由沿钢丝绳滑下的使锤打开瓶塞,从而采集海水样品。但是,悬挂采水瓶的钢丝绳在海流中的倾斜无法控制,所以无法准确控制和记录采样深度。而且,采水瓶的挂解和使锤的操作也比较繁琐,经常发生瓶盖没有关闭或丢失的情况。
电控多瓶采水器是目前广泛应用的另一种水样采集装置,配合温、盐、深传感器(CTD)使用,在采水的同时获取即时的海水温度、电导率和密度曲线。电控多瓶采水器采水时,电磁阀瓶塞根据甲板控制系统的指令开启。但是,电控多瓶采水器需要配备价格昂贵的甲板控制系统和数据采集系统,一般在水文设施齐全的大型船只上应用。另外,所挂的采水瓶一般容量较小,海水水样的采集量有限。
本文研究的船载水样自动采集系统,利用水泵并配合管路将水抽到船上,通过分配管路给营养盐分析仪等船载检测仪器提供水样进行现场测量。该系统采集的最大剖面深度为60 m,利用绞车将采水管放置到设定深度,由控制系统控制水泵自动完成一层或多层水样的采集。与传统人工采水的方式相比,大大减轻了实验人员的劳动强度,缩短了采样时间。
1 系统介绍
船载水样自动采集系统是利用采水泵及其它辅助装置将水样吸到船上,存放在水样罐内供船载监测仪器使用,原理框图如图1所示。
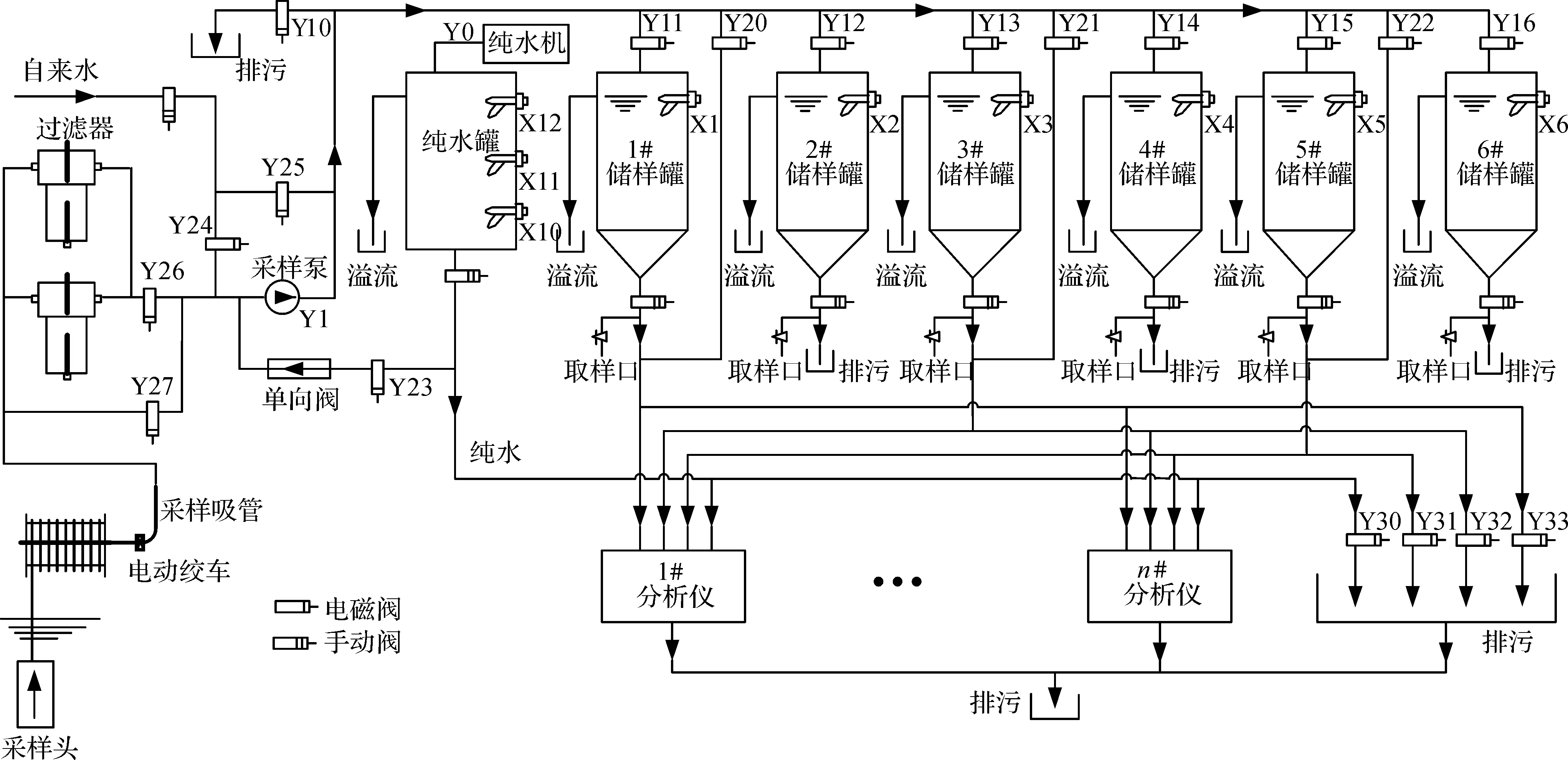
图1 水样自动采集系统原理框图Fig.1 Principle diagram of water automatic sampling system
船载水样自动采集系统包括硬件和软件两大部分,硬件主要包括采水泵及采水缆、布放回收装置(绞车)、储水罐及分配管路以及电控系统;软件主要包括计算机端上位机软件和电控系统端的下位机软件,图2为采集系统实物图。
实验人员在主控平台(上位PC机)设定好采样层数及采样深度后,通过RS232串口将指令下达给下位机可编程逻辑控制器(PLC),PLC控制绞车自动放缆,将安装在吸水管路末端的采样头下放到设定深度(设定先采集最底层);到达设定深度后采水泵自动开启,水样在采水泵的作用下经过过滤器进入水样罐;水样罐注满后,采水泵自动停止,绞车自动开始收缆将采样头收到设定的第2层的深度;到达设定深度后,绞车停止,水泵开启,将水样注入到第2个水样罐内;水样罐注满后,水泵停止,绞车启动,重复以上过程,直到采完设定的所有层水样;水样通过分配管路供给监测仪器,分析完毕后,PLC控制电磁阀自动打开,将水样罐内多余的水样排除。

图2 水样自动采集系统实物图Fig.2 Physical picture of water automatic sampling system
2 关键技术研究
2.1多功能复合采水缆研制
采水缆缠绕在绞车的滚筒上,总长80 m,集成了采水管、信号缆和凯夫拉承重绳,三者的外面包裹聚氨酯材料(图3)。多功能复合采水缆兼具采水、信号传输和承重的作用。采水管一端连接在绞车上,另一端连接采样头,用于吸取水样;信号缆传输压力传感器输出的4~20 mA电流信号,经PLC换算输出深度信号,以此判断水样采集的深度,压力传感器的使用可减小水样采集的深度误差;凯夫拉承重绳用于悬挂配重的铅鱼,破断力为500 kg,保证能够承担铅鱼和自身的重量;聚氨酯外套起到保护作用,能够适应-20~+40 ℃的温度,保持特性不变。
多功能复合采水缆的研制成功解决了以下3个关键问题:(1)复合采水缆为一体化结构,实现了下放和回收时绞车自动排缆;(2)经过对采水管、信号缆和承重绳的受力分析,确定三者合适的位置结构,提高抗弯曲、拉伸性能,解决了实验过程中信号缆受力拉断的问题;(3)提高了温度适应能力,能够适应全国大部分海域的环境温度,低温不变硬、皴裂,高温不变形。

图3 复合采水缆Fig.3 Composite water sampling cable
2.2下位机控制软件
下位机控制系统以PLC为核心[3],搭配模数转换模块和通信模块完成对各执行元件的控制,控制系统原理框图如图4所示。
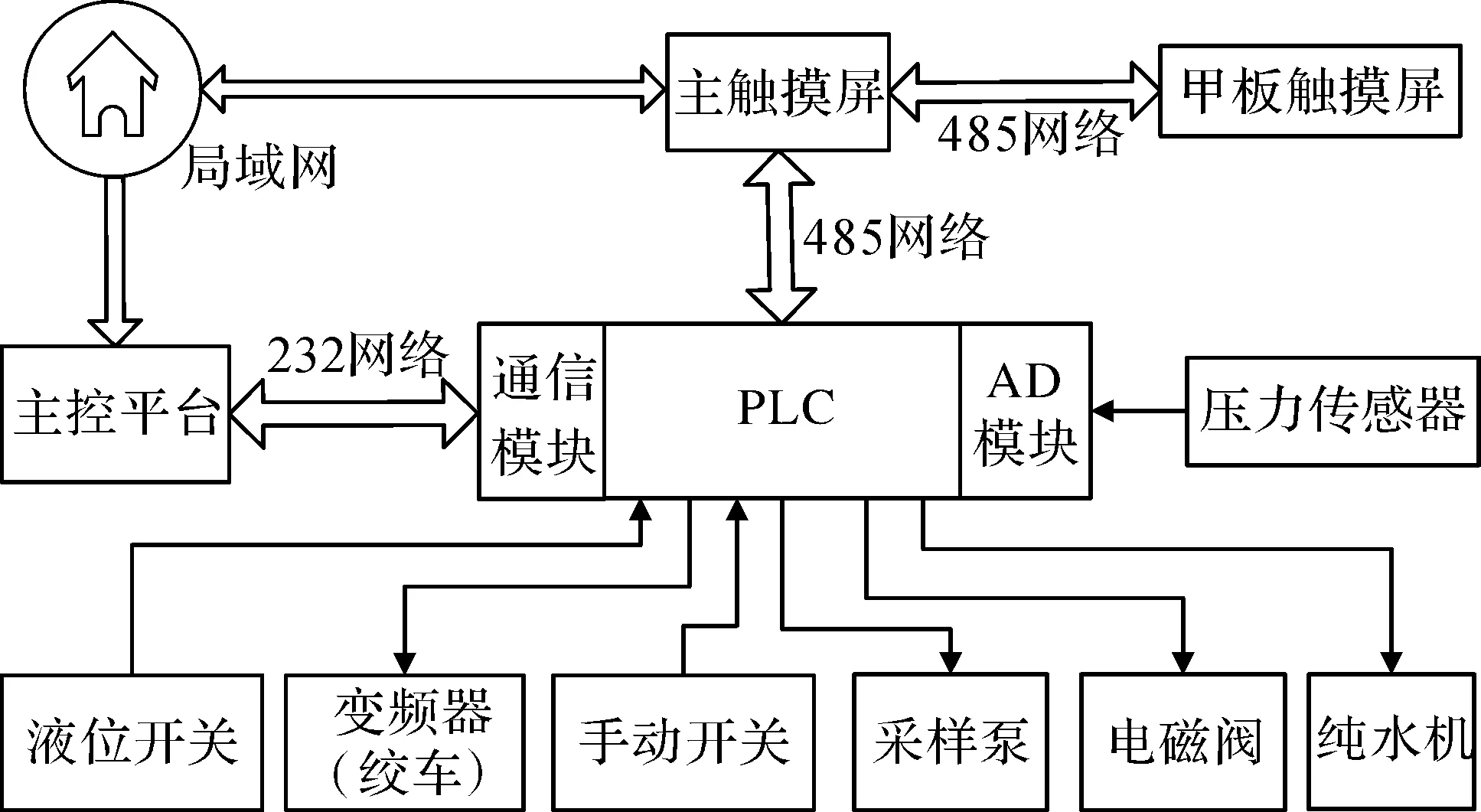
图4 控制原理框图Fig.4 Block diagram of control principle
控制系统共有全自动、半自动和手动3种控制模式,全自动控制模式为主要控制模式,半自动控制模式和手动控制模式可增加系统的灵活性。3种控制模式均设有运行状态监视、故障报警、历史记录查询等多种功能。同时,采用功能强大、简单易用的大屏幕彩色触摸屏作为人机交互界面[4],提供采样深度设定、时间设定以及动态显示当前系统状态及采样深度等功能。
PLC控制软件采用最常用的梯形图形式编写[5],先编写各功能模块子程序,然后将不同模块的程序整合成完整的程序,程序软件工作流程如图5所示。水样采集系统主要功能分为取水样、纯水控制及管路清洗三个方面,其中取水是最为核心的功能。系统上电运行后,首先进行初始化检查,完成后进入取水主程序,等待开始命令;取水完毕后,通知主控平台,并提示回收采样头;待检测仪器完成分析后,排空水样罐,然后清洗管路。纯水的控制独立于取水环节,目的是随时可以制作纯水,保证时刻有足够的纯水。
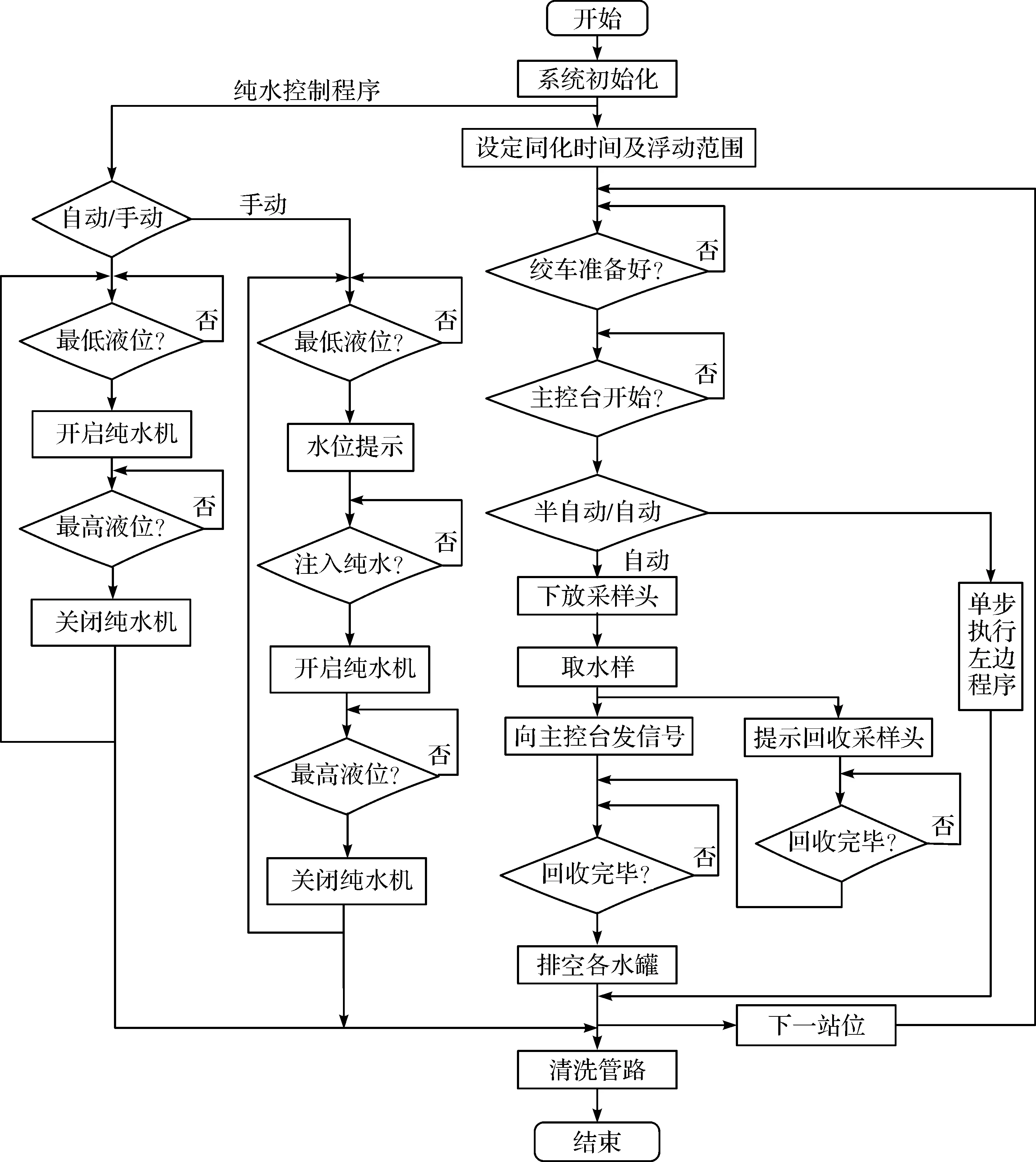
图5 采水系统软件流程图Fig.5 Program flow chart of water sampling system software
2.3上位机控制软件
上位机软件以船载计算机网络为核心,具有设备监控、数据采集传输、通讯及现场信息服务的功能。建设基于Internet/Intranet技术标准的船载计算机网络以及B/S体系结构的数据库管理系统,利用网络化、模块化的系统集成技术,完成对船载海水样品自动采集系统和其他船载监测仪器的控制,同时能够采集船载GPS、水文气象等设备的参数并进行显示,实现对船载设备工作状态的实时监控,数据收集、提取、分析、处理与存贮,同时将监测数据实时传回地面支持系统进行信息产品制作和发布。水样采集的自动化控制业务流程图如图6所示。
主界面表现层主要实现被监控设备的运行状态,水文气象信息等连续观测设备的数据内容,通过曲线、表盘、数据表格、矢量地图、Led灯转换等形式实现
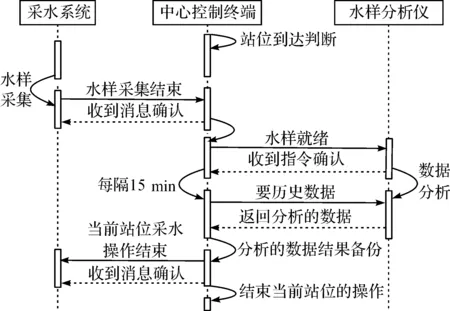
图6 水样采集自动化控制业务流程图Fig.6 Automatic control flow chart of water sampling system
数据信息的动态形象方面的展示。通过文本数据输入控件、按钮控件、列表控件、下拉列表控件等基本控件形式实现控制信息的输入、运行状态的控制等功能,如图7所示。
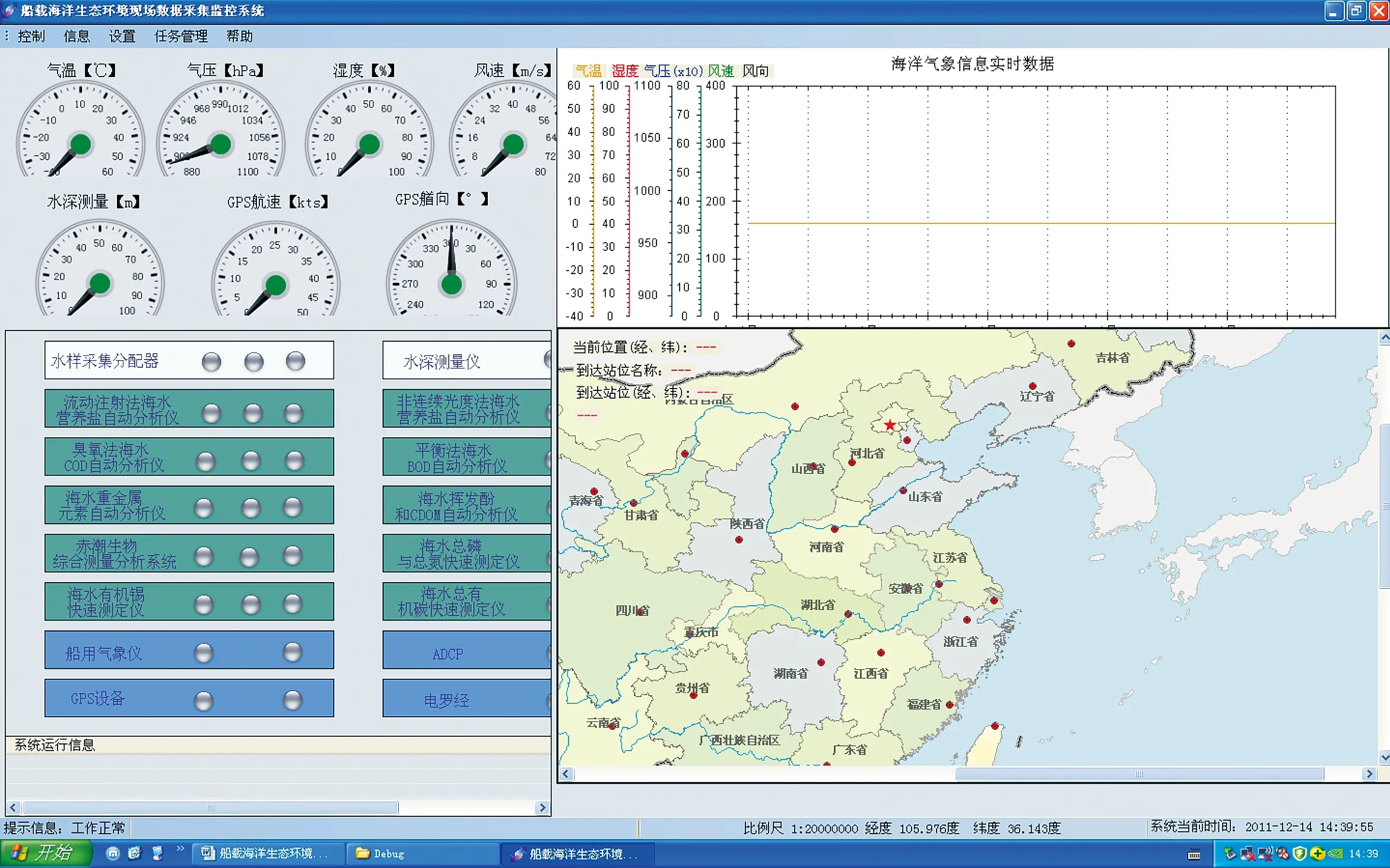
图7 软件主界面显示图Fig.7 Main interface graph of software
3 海上试验
船载海水样品自动采集系统在船上安装完毕后,在我国渤海和东海做了大量的海上试验,系统稳定性得到了充分验证。渤海试验分别在春季和冬季各进行2个航次,每季的2个航次均连续试验,历时40多天。根据海试大纲的要求,共计设置86个站位,404个点位(不同站位采样的层数不同)。东海海试选在嵊泗附近海域,共设置17个站位,51个点位(图8为海试站位图)。海试期间,船载海水样品自动采集系统工作稳定、运行可靠,系统采用压力传感器定位采样深度,精度能够控制在0.1 m。
由于海上试验受到天气的制约,在天气好的时候通常24 h连续采样,这样就导致人工采水的实验人员体力严重透支,而自动采样系统不需过多的人为干预,可大大减轻实验人员的数量和体力。
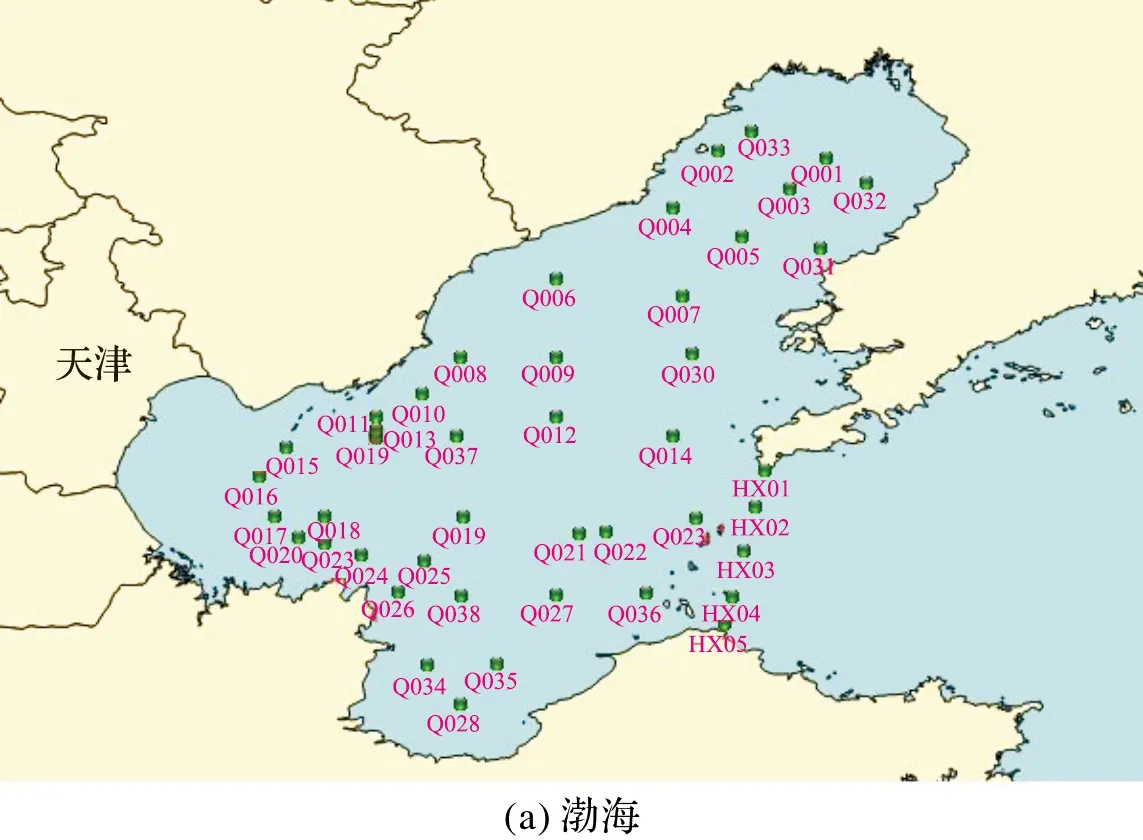

图8 海试站位图Fig.8 Distribution map of sea trials sites
4 小结
船载水样自动采集系统经过“十五”和“十一五”两期“863”项目的支持,在中国渤海和东海做了大量的海上试验,方案的可行性以及系统的稳定性得到了验证,已经成为一项技术成熟的水样采集手段,目前已成功安装在向阳红08船、海监47船和向阳红28船3条船上,大大提升了我国近海海洋生态环境现场监测业务化运行能力。另外,该系统也可以做到小型
化,推广应用到众多沿海或江河、湖泊等岸基实验室内,完成海水、淡水水质样品的采集与分配,为实时在线监测仪器设备提供水样。
[1] ZHANG Xiao-ling, CHEN Zhong-min, ZHANG Song-ming. Study and development of new monitoring technology in ocean environmental pollution[J].Fujian Agricultural Science and Technology,2004(4):45-46.
张小玲,陈钟敏,张颂明.探索和发展海洋环境污染监测新技术[J].福建农业科技,2004(4):45-46.
[2] ZHU Guang-wen. Present situation and development trend of domestic and international of marine monitoring technology[J]. Meteorological, Hydrological and Marine Instrument,1997(2):1-14.
朱光文.海洋监测技术的国内外现状及发展趋势[J].气象水文海洋仪器,1997(2):1-14.
[3] SI Hui-min, WANG Xiang-nan, LI Chao, et al. Software design of shipborne seawater automatic sampling system[J].Ocean Technology,2011,30(1):15-19.
司惠民,王项南,李超,等.船用海水自动采样系统的软件设计[J].海洋技术,2011,30(1):15-19.
[4] DING Li-jun, LI Hong-yan. The design and application of communication between host computer and PLC[J]. Machine Tool & Hydraulics,2009,37(9):231-232.
丁莉君,李宏燕.上位机与PLC通信的设计及应用[J].机床与液压,2009,37(9):231-232.
[5] XIANG Xiao-han, WANG Bao-yin. MITSUBISHI FX series PLC proficient course[M]. Beijing: Chemical Industry Press,2014.
向晓汉,王保银.三菱FX系列PLC完全精通教程[M].北京:化学工业出版社,2014.
Shipborne seawater automatic sampling system
LI Chao1, SI Hui-min*1, GUAN Yi1, YU Hao2
(1.NationalOceanTechnologyCenter,Tianjin300112,China;2.NorthChinaSeaMarineTechnicalSupportCenter,SOA,Qingdao266033,China)
In order to meet the requirements of fast and multi-factors monitoring of the marine environment, a kind of shipborne automatic sampling system (SASS) was developed. SASS has a simple and flexible operation system, and has three control modes: automatic, semi-automatic and manual mode. The hardware of SASS mainly consists of pump, composite cable, electric winch, electric control cabinet and storage tank. With the control of the software, the devices such as winch and collecting pump can open and close automatically, to complete the collection of multi-level seawater samples in same site. Compared with the traditional method, this system can greatly reduce the labor intensity of the experimenters, and improve the precision of sampling depth. After a large number of sea trials in the Bohai Sea and in the East China Sea, SASS has been proved to be stable.
marine environment monitoring; shipborne; pump; automatic sampling
2016-01-18
2016-07-10
国家高新技术研究发展计划(“863计划”)项目资助(2007AA09210112,2007AA092001-8)
李超(1978-),男,天津市人,高级工程师,主要从事海洋观测技术研究。E-mail:superman5867@163.com
司惠民(1987-),男,工程师,主要从事海洋环境监测技术研究。E-mail:zdhshm@163.com
P715
A
1001-909X(2016)03-0080-06
10.3969/j.issn.1001-909X.2016.03.013
李超,司惠民,关一,等.船载水样自动采集系统[J].海洋学研究,2016,34(3):80-85,doi:10.3969/j.issn.1001-909X.2016.03.013.
LI Chao, SI Hui-min, GUAN Yi,et al. Shipborne seawater automatic sampling system[J]. Journal of Marine Sciences, 2016,34(3):80-85, doi:10.3969/j.issn.1001-909X.2016.03.013.
猜你喜欢
水泵技术(2021年5期)2021-12-31 05:26:46
昆钢科技(2021年1期)2021-04-13 07:55:04
辐射防护通讯(2019年3期)2019-04-26 05:16:26
绿色科技(2018年24期)2019-01-19 06:36:50
意林(儿童绘本)(2018年10期)2018-11-08 11:01:36
设备管理与维修(2016年7期)2016-04-23 06:51:55
同煤科技(2015年4期)2015-08-21 12:51:04
河南科技(2014年24期)2014-02-27 14:19:41
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年12期)2014-02-27 14:10:35