
基于地形融合分类的分区二维恒虚警检测器*
2016-10-29 02:33彭馨仪
电讯技术 2016年5期
彭馨仪
(中国西南电子技术研究所,成都 610036)
基于地形融合分类的分区二维恒虚警检测器*
彭馨仪**
(中国西南电子技术研究所,成都610036)
在非均匀杂波背景下,由于恒虚警(CFAR)检测器与杂波背景幅度分布不匹配,导致检测器性能出现剧烈下降。针对此问题,提出了一种基于地形融合分类的分区二维CFAR检测器。首先提出一种基于拟合优度(GoF)的地形融合分类算法来对非均匀杂波背景下的地形进行分类编号,同时记录各地形的幅度分布及幅度分布参数;再根据地形编号及记录的幅度分布选择相匹配的CFAR处理窗实现分区二维CFAR;最后利用实测数据验证了该地形融合分类算法的有效性,并用半实测、实测数据对所提出CFAR检测器性能进行了仿真验证,结果表明相比传统二维CFAR检测器,所提出的CFAR检测器在非均匀背景下性能有明显提高。
分区二维恒虚警检测;地形融合分类;非均匀杂波;拟合优度
1 引 言
恒虚警(Constant False Alarm Rate,CFAR)检测被广泛应用于雷达系统。在CFAR体制中,待检测单元(Cell Under Test,CUT)与一个自适应门限比较,自适应门限是利用CUT周围距离单元数据作为处理窗估计得到的,处理窗中的数据需要满足与CUT独立同分布(Independent and Identically Distributed,IID)[1-3]。然而在实际雷达照射区域,背景环境中往往包含许多变化的地形(如城市和海岸线等),背景环境是非均匀的,导致参考单元数据的分布与CUT不同,使得目标的检测性能明显下降[4-5]。
虽然目前国内外有大量非均匀杂波背景下CFAR检测器的研究[6-7],但现有的研究大多都是基于杂波背景服从一种特定的幅度分布,只是不同地形具有不同的分布参数的假设来进行的,如文献[8]中给出的一种非均匀Weibull背景下的CFAR检测器以及文献[9]中给出的一种非均匀复合高斯背景下的CFAR检测器。然而实际环境中,单一的幅度分布往往无法满足场景中不同地形的杂波特性(如海岸线,陆地杂波更逼近Weibull分布或Log-Normal分布,而海洋杂波更逼近于K分布),此时检测器与杂波背景特性的不匹配会导致检测器性能剧烈下降。
为此,本文提出一种地形融合分类算法,对独立同分布的距离单元数据进行分类编号。该分类算法通过引入拟合优度(Goodness of Fit,GoF)来判断相邻参考窗内的距离单元是否满足独立同分布特性,对于满足独立同分布的相邻参考窗进行融合,不满足独立同分布的参考窗进行编号并记录其幅度分布及分布参数。然后本文提出基于分类的地形编号,提出分区二维CFAR检测器,利用分类的地形编号,选取与CUT独立同分布的距离单元,并根据记录的各地形的幅度分布选择相应的CFAR检测器。最后本文利用实测数据验证了地形融合分类算法的性能,利用计算机仿真及实测数据验证了提出的CFAR检测器性能,结果显示本文提出的CFAR检测器在非均匀背景下具有良好的性能。
2 地形融合分类
地形融合分类算法利用回波数据来实现雷达照射区域的距离单元地形分类,其过程包括参考窗划分、参考窗融合及地形编号三个部分。首先将雷达照射区域分为均匀的小区域,每个小区域作为一个参考窗,对相同地形的参考窗进行融合,并对融合后的各个参考窗的地形进行编号来得到整个雷达照射区域的地形分类,如图1所示。

图1 地形融合分类示意图Fig.1 The terrain fusion classification algorithm schematic
2.1参考窗划分及参考窗融合
考虑一个典型的非均匀雷达回波场景中,假设各距离单元的幅度分布类型相同,而分布参数可能不同,并认为连续的q×r个距离单元是均匀的,其中q、r的选取根据场景大小进行确定,则参考窗融合算法的过程如下∶
(1)将雷达照射区域均匀的分成N个参考窗,每个参考窗中包含q×r个距离单元;
(2)利用AD(Anderson-Darling)-Test检验判断各个参考窗内参考单元是否服从相同的分布,当不服从相同分布,标记该参考窗为独立的地形,选取其AD-Test最小值作为其幅度分布类型,反之,认为该参考窗是均匀的;
(3)对于均匀的参考窗,当与其相邻的参考窗也为均匀的,融合这两个相邻的参考窗为一个参考窗,利用AD-Test判断融合后的参考窗内参考单元是否服从相同的分布,当不服从相同分布,分别记录两个参考窗融合前的幅度分布及参数参数,反之,认为融合后的参考窗为均匀的;
(4)重复步骤3直到没有可融合的参考窗为止。
其中AD-Test是一种GoF计算方法。GoF是一种用于描述一组观测量与某个特定分布符合程度的统计模型。假设n个独立同分布的随机变量xi(i= 1,2,…,n),这些随机变量的分布(概率密度函数(Probability Density Function,PDF)或累计分布函数(Cumulative Distribution Function,CDF)为G(x),先验未知。此外,有一个假定的分布函数F(x)。于是问题可表述为下面的二元假设检验问题∶

计算样本CDF和经验概率密度函数(Empirical Probability Density Function,EDF)间的距离来确定样本是否属于某一特定分布函数,即判断原假设H0是否成立。假设n个IID的随机变量,对样本排序x1≤x2≤…≤xn,
比较A2和各假设分布函数的与置信度α下的门限η的大小,如果A2高于门限η,拒绝H0假设,否则接收H0假设[10-13]。。
目前广泛应用的雷达幅度分布类型包括瑞利分布、对数正态分布、Weibull分布和K分布。
2.2地形编号
对于融合后的雷达回波场景,根据记录的融合后参考窗内距离单元的分布参数对融合后的参考窗进行编号,具有相同分布参数的参考窗编号相同,为同一种地形。由于各个参考窗内的数据量有限,导致估计的分布参数在一个范围内上下浮动,对一定范围内浮动分布参数归为一类。以双参数概率密度函数为例,编号过程如下∶
(1)对记录的所有融合后的参考窗的尺度参数和形状参数进行排序;
(2)根据参数的变化范围,分别将排序的形状参数和尺度参数划分为N1和N2份。
3 基于地形融合分类的分区二维CFAR检测器
在得到雷达照射平面的地形分类后,采用地形融合分类CFAR检测进行目标检测。由于地形分类时每个参考窗内含有q×r个距离单元,因此与待检测单元地形一致的距离单元个数至少为q×r个,且分布形式为二维分布,因此CFAR检测算法采用二维CFAR。
传统二维CFAR是分别在距离向和角度向选取L个距离单元作为处理窗来估计待检测单元的门限,其中待检测单元xCUT位于中间,保护单元和参考单元均为二维的,如图2所示。

图2 二维CFAR处理窗Fig.2 The processing window of two dimension CFAR detector
则二维CFAR检测器为
式中∶α为门限因子,各幅度分布不同,由虚警概率Pfa决定,因此不同幅度分布下门限因子α不同。
基于地形融合分类的分区二维CFAR,根据得到的地形自适应地选取与待检测单元具有相同编号的距离单元作为CFAR检测的参考单元。假设雷达照射区域均匀的分成N个参考窗,每个参考窗中包含q×r个距离单元。CFAR处理窗大小为[q,L]×[r,L],其中L>q且L>r,待检测单元为xCUT,与xCUT具有相同编号的距离单元为xi,其中i=1,2,…,n,n为与CUT相同编号的距离单元个数。则CFAR处理窗选取原则如下∶
(1)当n<L×L,则CFAR处理窗选取所有与xCUT具有相同编号的距离单元;
(2)当n≥L×L,则CFAR处理窗选取距离xCUT最近的L×L个具有相同编号的距离单元。
最后,根据2.1中记录的幅度分布计算xCUT的门限因子α,实现分区二维CFAR检测。
综上所述,本文提出的基于回波数据融合的地形融合分类CFAR检测算法流程如图3所示。

图3 基于地形融合分类的分区二维CFAR检测算法流程Fg.3 The flowchart of two-dimensional CFAR detection algorithm based on terrain fusion classification
4 仿真结果
为验证上述地形融合分类算法在实际应用中的性能,采用静止目标获取与识别(Moving and Stationary Target Acquisition and Recognition,MSTAR)二维杂波公开数据和多参数成像X频段雷达(Ice Multiparameter Imaging X-band,IPIX)实测数据,并利用计算机仿真及IPIX雷达实测数据加入目标来验证基于参考窗融合的地形融合分类CFAR相比传统CFAR的性能。
4.1计算机仿真验证地形融合分类CFAR性能
利用基于某地区有地形的场景为基础,根据该地区地形高层数据及地理信息系统(Geographic Information Systems,GIS)查表得到不同地形对应的后向散射系数、幅度分布及幅度分布参数,仿真产生半实测数据来验证CFAR检测器的性能。GIS地形如图4所示。

图4 GIS地形图Fig.4 GIS topographic map
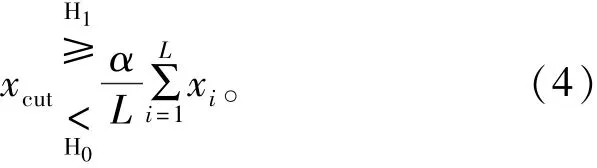
综合考虑计算量及数据代表性,只取场景中50 ×50个距离单元进行性能仿真,根据幅度分布及幅度分布参数随机产生该场景的杂波数据,在地图中心放入目标,目标为Swerling I型,在(-π,π]上具有均匀分布的随机多普勒频移。蒙特卡洛次数为5 000次,传统二维CFAR参考窗长度为L×L=16× 16,地形融合分类CFAR参考窗为L×L=16×16,地形融合参考窗为q×r=4×4,虚警概率为Pfa=10-3。仿真结果如图5~8所示。
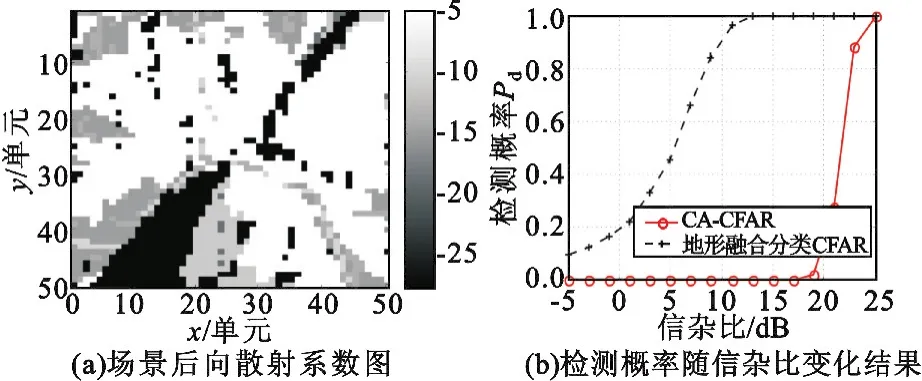
图5 场景1检测结果Fig.5 Detection result of Scene 1

图6 场景2检测结果Fig.6 Detection result of Scene 2
图7 场景3检测结果Fig.7 Detection result of Scene 3

图8 场景4检测结果Fig.8 Detection result of Scene 4
由图5~8可以看出∶基于地形融合分类的分区二维CFAR能够有效抑制虚假点迹,且检测性能明显优于传统的二维CFAR检测算法;在检测概率为50%时,基于地形融合分类的分区二维CFAR相比传统二维CFAR输入信噪比改善了5~15 dB。
4.2MSTAR二维杂波公开数据
MSTAR二维杂波公开数据是SAR雷达的实测数据,杂波通常来源于草地、森林、城市等地杂波,可以用Weibull概率密度函数拟合。选取MSTAR二维杂波公开数据的HB06237文件,其杂波强度灰度图如图9(a)所示,利用本文的基于参考窗融合的地形分类得到的地形分类结果如图9(b)所示,其中q× r=5×5。

图9 MSTAR实测数据地形融合分类结果Fig.9 Terrain fusion classification result of MSTAR measured data
4.3IPIX雷达实测数据
IPIX雷达实测数据是加拿大麦克马斯特大学IPIX雷达的实测回波数据,雷达位于44°36.72'N,63°25.41'W,架设于高于海平面约30.48 m高的悬崖上。本文采用1993年11月的数据,数据大小为1 900×184。图10(a)给出了IPIX雷达实测数据直角坐标系下雷达照射区域的杂波幅度图,利用本文的基于参考窗融合的地形分类得到的地形分类结果如图10(b)所示,其中q×r=2×20。
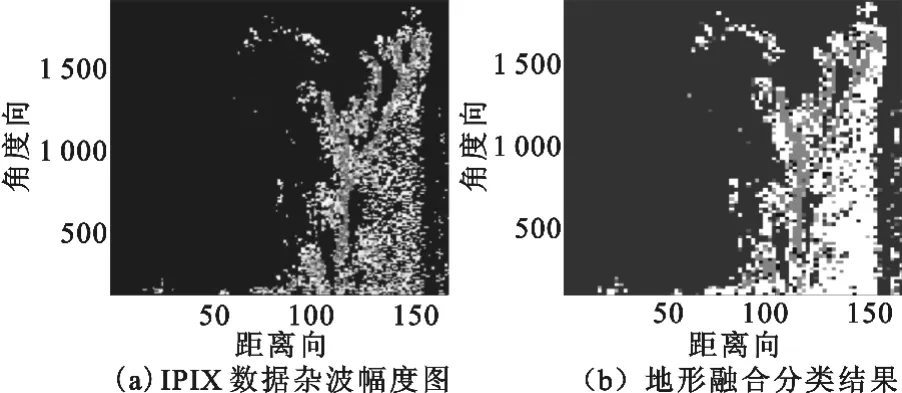
图10 IPIX实测数据地形融合分类结果Fig.10 Terrain fusion classification result of IPIX measured data
上述结果表明尽管在雷达体制和分辨率上MSTAR二维杂波数据和IPIX数据有很多不同,但本文提出的基于参考窗融合的地形分类能够对实际地形进行准确分类。因此,其他实测数据也能运用上述地形分类算法。
4.4IPIX雷达实测数据中加入目标
在IPIX雷达实测数据中加入服从Swerling I模型、具有归一化的、在(-π,π]均匀分布的随机多普勒频移的目标,理论虚警概率相同为Pfa=10-3,传统二维CFAR参考窗长度为L×L=4×4,地形融合分类CFAR参考窗为L×L=4×4,图11给出了结果。
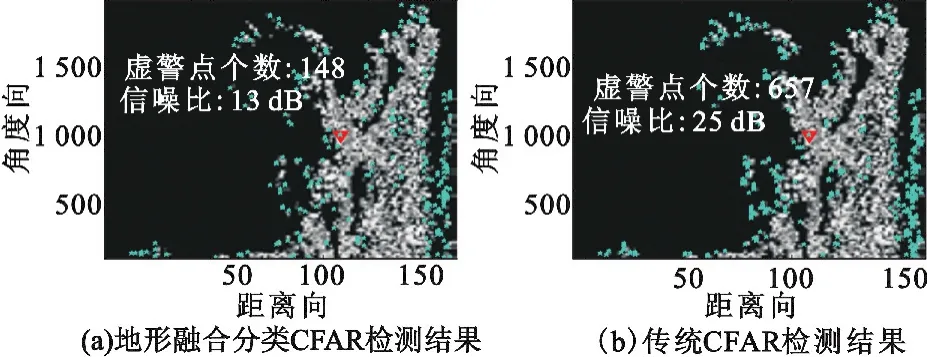
图11 IPIX实测数据检测结果对比图Fig.11 Comparison of the CFAR detectors of IPIX measured data
如图11所示,对这一帧IPIX实测数据而言,地形融合分类CFAR检测算法虚警点个数为418个,实际虚警率Pfa=1.375×10-3,而传统CFAR在目标信杂比虚警点个数为657个,实际虚警率Pfa= 2.161×10-3,均满足虚警概率要求。地形融合分类CFAR检测算法实际的虚警点数相比传统CFAR减少了36.4%,更好地抑制了杂波虚警点。在目标信杂比(Signal-to-Clusster Ratio,SCR)为13 dB时,地形融合分类CFAR检测算法开始检测到目标,而传统二维CA-CFAR在目标SCR为25 dB时才开始检测到目标,可见对这一帧IPIX实测数据而言,基于地形融合分类的分区二维CFAR检测算法与传统CFAR检测算法输入信杂比相比有12 dB的改善。
由于半实测数据仿真产生的参考单元个数有限,难以统计虚警率,故只统计了检测概率随SCR的变化规律,后续将进一步研究虚警率随SCR的变化。
5 结束语
本文提出了一种基于拟合优度的地形融合分类算法对复杂非均匀杂波背景进行地形分类编号,并根据地形编号选择参考窗,实现分区二维CFAR处理。实测和半实测数据验证了恒虚警检测算法的有效性。本文提出的地形融合分类有效,且相比传统二维CFAR检测器,本文提出的CFAR检测器在非均匀背景下性能有明显改善。地形融合分类算法作为CFAR检测器的预处理过程是用于挑选非均匀杂波背景下与CUT独立同分布的距离单元的,为了保证CFAR算法的实时性,可建立环境知识库,通过先验知识记录下背景环境的幅度分布及分布参数,在工程应用时直接从先验知识库中提取。因此,下一步将重点研究如何建立背景环境知识库。
[1] SKOLNIK M I.雷达手册[M].3版.南京电子技术研究所,译.北京∶电子工业出版社,2010∶262-304. SKOLNIK M I.Radar manual[M].3rd ed.Translated by Nanjing Institute of Electronic Technology.Beijing∶Publishing House of Electronics Industry,2010∶262-304.(in Chinese)
[2] KONG L J,PENG X Y,ZHANG T X.A homogenous reference cells selector for CFAR detector in highly heterogeneous environment[J].Progress in Electromagnetics Research C,2013,41(6)∶175-188.
[3] 何友,关键,彭应宁,等.雷达自动检测与恒虚警处理[M].北京∶清华大学出版社,1999.
HE You,GUAN Jian,PENG Yingning,et al.Radar adaptive detection and CFAR[M].Beijing∶Tsinghua University Press,1999.(in Chinese)
[4] RICHARDS M A.雷达信号处理基础[M].3版.邢孟道,王彤,李真芳,等,译.北京∶电子工业出版社,2008∶260-287.
RICHARDS M A.Radar signal processing[M].3rd ed. Translated by XING Mengdao,WANG Tong,LI Zhenfang,et al.Beijing∶Publishing House of Electronics Industry,2008∶260-287.(in Chinese)
[5] 胡文琳,王永良,王首勇.一种基于有序统计的鲁棒CFAR检测器[J].电子学报,2007,35(3)∶530-533.
HU Wenlin,WANG Yongliang,WANG Shouyong.A robust CFAR detector based ordered statistic[J].Acta Electronica Sinica,2007,35(3)∶530-533.(in Chinese)
[6] GURAKAN B,CANDAN C,CILOGLU T.CFAR processing with switching exponential smoothers for nonhomogeneous environments[J].Digital Signal Processing,2012,22(3)∶407-416.
[7] JEONG H K,BELL M R.A computationally efficient CFAR algorithm based on a goodness-of-fit test for piecewise homogeneous environments[J].IEEE Transactions on Aerospace and Electronic Systems,2013,49(3)∶1519-1535.
[8] POURMOTTAGHI A,TABAN M R,GAZOR S.A CFAR detector in a nonhomogenous Weibull clutter[J].IEEE Transactions on Aerospace and Electronic Systems,2013,48(2)∶1747-1758.
[9] PENG X Y,KONG L J,ZHANG T X.Adaptive CFAR detection in heterogeneous compound-Gaussian[C]// Proceedings of 2013 IEEE Radar Conference.Ottawa,ON∶IEEE,2013∶1-4.
[10] STEPHENS M A.EDF statistics for goodness of fit and some comparisons[J].Journal of the American Statistical Association,Theory and Method Section,1974,69(347)∶730-737.
[11] LIN B,KONG L J.Performance analysis of non coherent CFAR detection based on goodness-of-fit tests in different clutter environments[C]//Proceedings of 2009 IEEE International Congress on Image and Signal Processing.Tianjin∶IEEE,2009∶1-4.
[12] NOROUZI Y,GINI F,NAYBBI M M,et al.Non-coherent radar CFAR detection based on goodness-of-fit tests[J]. IET Radar,Sonar and Navigation,2007,1(2)∶98-105.
[13] ISKANDER D R.Estimation of the parameters of the K-distribution using higher order and fractional moments[J].IEEE Transactions on Aerospace and Electronic Systems,1999,35(4)∶1453-1457.

彭馨仪(1989—),女,四川阆中人,2014年于电子科技大学获硕士学位,现为工程师,主要研究方向为信号与信息处理。
PENG Xinyi was born in Langzhong,Sichuan Province,in 1989.She received the M.S. degree from University of Electronic Science and Technology of China in 2014.She is now an engineer.Her research concerns signal processing.
Email∶fcadjy@126.com
A Partition Two-dimensional Constant False Alarm Rate Detector Based on Terrain Fusion Classification
PENG Xinyi
(Southwest China Institute of Electronic Technology,Chengdu 610036,China)
∶In heterogeneous clutter background the constant false alarm rate(CFAR)detectors always mismatch the actual clutter background characteristics which lead to a sharp decline in the detector performance.In order to solve the problem,a partition two-dimensional CFAR detector based on terrain fusion classification is proposed.Firstly,a terrain fusion classification algorithm is proposed based on the goodness of fit(GoF)to realize the terrain classification numbering under complex heterogeneous clutter and the amplitude distribution and amplitude distribution parameters recording.And then with the numbered terrain and the recorded amplitude distribution,CFAR processing window selects the amplitude distribution matched CFAR detector to achieve the two-dimensional partitions CFAR.Finally,the measured data proves the effectiveness of the terrain fusion classification algorithm.The half measured data and measured data is provided to demonstrate the performance of the proposed CFAR detector,and the result shows that compared with the traditional two-dimensional CFAR detector,the proposed one has significant improvement in heterogeneous clutter background.
∶partition two-dimensional constant false alarm rate detection;terrain fusion classification;heterogeneous clutter;goodness of fit
TN951
A
1001-893X(2016)05-0575-06
10.3969/j.issn.1001-893x.2016.05.017
彭馨仪.基于地形融合分类的分区二维恒虚警检测器[J].电讯技术,2016,56(5)∶575-580.[PENG Xinyi.A partition two-dimensional constant false alarm rate detector based on terrain fusion classification[J].Telecommunication Engineering,2016,56(5)∶575-580.]
2015-09-15;
2015-12-24Received date:2015-09-15;Revised date:2015-12-24
**通信作者:fcadjy@126.comCorresponding author:fcadjy@126.com
猜你喜欢
科学与信息化(2021年30期)2021-12-24
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
火力与指挥控制(2018年10期)2018-11-13
中国交通信息化(2017年9期)2017-06-06
电子制作(2017年10期)2017-04-18
工业设计(2016年11期)2016-04-16
火控雷达技术(2016年3期)2016-02-06
西北工业大学学报(2015年3期)2015-12-14
百科探秘·航空航天(2015年4期)2015-11-07
