混合动力汽车行进间起动发动机与DCT换挡协调控制*
2016-10-29 07:38刘永刚陈亮秦大同雷贞贞吴睿
华南理工大学学报(自然科学版) 2016年9期
刘永刚 陈亮 秦大同 雷贞贞,3 吴睿
(1.重庆大学 机械传动国家重点实验室∥汽车工程学院, 重庆 400044; 2.上海汽车变速器有限公司, 上海 201807;3.重庆科技学院 机械与动力工程学院, 重庆 401331)
混合动力汽车行进间起动发动机与DCT换挡协调控制*
刘永刚1陈亮2秦大同1雷贞贞1,3吴睿1
(1.重庆大学 机械传动国家重点实验室∥汽车工程学院, 重庆 400044; 2.上海汽车变速器有限公司, 上海 201807;3.重庆科技学院 机械与动力工程学院, 重庆 401331)
结合双离合器自动变速器(DCT)独特的结构型式和性能优势,提出了一种装备DCT的单电机重度混合动力系统,建立了该重度混合动力系统的动力学模型.采用基于规则的方法,以系统效率最优为目标进行了工作模式区域分析与经济性换挡规律分析,制定了混合动力汽车模式切换与DCT换挡的综合工作规律.针对综合工作规律中模式切换点与换挡点相交的情况,提出了模式切换与换挡协调控制策略以及控制方法,并利用Matlab/Simulink软件仿真平台进行了行进间起动发动机与升挡协调控制过程的仿真分析.结果表明:所建立的行进间起动发动机与升挡协调控制策略有效提升了装备DCT的混合动力系统的性能,不仅解决了装备DCT的混合动力汽车模式切换与换挡冲突的问题,同时较大程度地节省了模式切换与换挡时间,充分发挥了装备双离合器自动变速器的混合动力系统的结构优势.
混合动力汽车;双离合器自动变速器;模式切换;换挡;控制策略
重度混合动力汽车具有多个动力源,不同的驱动形式使其具有多种工作模式,这就使得针对车辆在行驶过程中各工作模式之间切换的平顺性研究显得非常重要[1-3].装备双离合器自动变速器(DCT)的混合动力汽车利用了双离合器自动变速器结构简单、传动效率高以及换挡无动力中断的特点,具有较好的动力性能与经济性能,但在不同工作模式下车辆的换挡过程也对车辆行驶过程中的平顺性有较大的影响[4-6].因此,充分发挥混合动力系统与双离合器自动变速器的优点,并且保证车辆在模式切换与换挡过程中具有良好的平顺性,是目前混合动力汽车研究领域的一大难点.
文献[7]针对重度混合动力系统行进间起动发动机控制的平顺性问题,提出了行进间起动发动机过程电机协调转矩控制策略,仿真与试验表明,该策略能有效保证在起动发动机过程整车的平顺性.文献[8]针对并联式混合动力汽车开发了一套汽车行进间以起动离合器连接起动发动机的控制算法,并通过仿真与硬件在环试验对其进行验证改进,最终取得了良好的控制效果.文献[9]设计了一种新的控制器,用于跟踪DCT两离合器切换过程各阶段的目标转矩,仿真与实验表明所设计的控制器简单高效.文献[10]通过准确估计DCT两离合器传递扭矩的目标转矩,开发了一种基于驱动系统模型的观测器及相应的控制算法,并通过样车试验验证所设计观测器及算法的有效性.文献[11]针对基于AMT的混合动力汽车进行了两种模式下的换挡控制研究,仿真与台架试验表明,该换挡控制策略能有效提高换挡品质.为了提高换挡品质,文献[12]提出了一种无离合器操作的换挡控制策略,并通过台架试验验证了其有效性.针对DCT混合动力汽车换挡过程离合器与动力源的协调控制问题,文献[13]设计了一种鲁棒控制器来实现转速的同步,仿真结果表明,该控制器能很好地解决换挡过程离合器与动力源的协调控制问题.文献[14-15]分析了换挡过程发动机与离合器的转速和转矩特性,提出了模糊换挡时间决策和基于DCT动态模型的转矩协调控制策略,并通过仿真与试验证明了其控制策略的有效性.
然而,当模式切换条件与换挡条件同时触发时,整车控制器需要设立一个优先级来确定优先进行的动作,或者采取某种措施以避免同时进行模式切换与换挡操作过程.针对此情况,文中提出了一种装备DCT的单电机重度混合动力驱动系统,利用其独特的结构形式进行模式切换与换挡协调操作,以缩短混合动力汽车工作模式的切换时间,减少模式切换与换挡过程的重复动作,充分发挥混合动力系统与DCT的性能与结构优势.
1 混合动力系统分析与建模
文中的研究对象为装备DCT的单电机重度混合动力系统,其结构简图如图1所示.该系统主要由发动机、主离合器C0、起动发电一体电机(ISG)、动力电池组以及DCT组成.
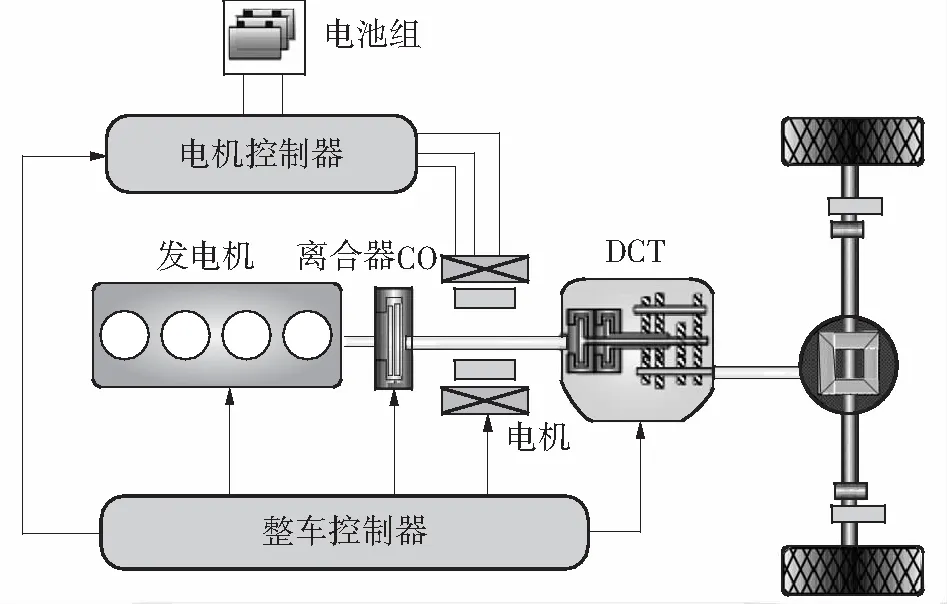
图1 装备DCT的单电机重度混合动力系统结构简图
Fig.1StructurediagramofthesinglemotorfullhybridsystemequippedwithDCT
该混合动力系统工作模式及相关部件的工作状态如表1所示.

表1 HEV工作模式及相关部件的工作状态
1.1动力学模型
假设混合动力驱动系统是由无惯性的弹性环节和无弹性的惯性环节组成,各相关部件以集中质量的形式存在,根据假设建立了装备双离合器自动变速器的混合动力系统的动力学模型[15],如图2所示.其中:Te、TC0、Tm、TC1、TC2、Tout、TL分别为发动机输出转矩、主离合器C0传递的转矩、ISG电机输出转矩、离合器C1和C2传递的转矩、DCT输出轴的输出转矩及车辆外界阻力矩;Ie为发动机曲轴(包括飞轮)及主离合器C0主动盘的当量转动惯量;I0为主离合器C0从动盘的当量转动惯量;Im为ISG电机转子及离合器C1、C2主动盘的当量转动惯量;I1、I2分别为离合器C1、C2从动盘减振器主动部分的当量转动惯量;I3为离合器C1减振器的从动部分、输入轴1(实心轴)及关联奇数挡齿轮的当量转动惯量;I4为离合器C2减振器的从动部分、输入轴2(空心轴)及关联偶数挡齿轮的当量转动惯量;I5为中间轴1及其关联齿轮、主减速器1主动部分的当量转动惯量;I6为中间轴2及其关联齿轮、主减速器2主动部分的当量转动惯量;I7为主减速器从动部分、差

图2 装备DCT的单电机重度混合动力系统的动力学模型
Fig.2DynamicmodelofthesinglemotorfullhybridsystemequippedwithDCT
速器、半轴及车轮的当量转动惯量;I为整车等效到输出轴的当量转动惯量;ωe、ωm、ω1、ω2、ω3、ω4、ω5、ω6、ω7、ωw分别为发动机曲轴的角速度、ISG电机旋转的角速度、离合器C1和C2从动盘的角速度、输入轴1和2的角速度、输出轴1和2的角速度、车辆半轴的角速度及车轮的角速度;k1、k2、c1、c2分别为离合器C1、C2减振器的扭转刚度和结构阻尼系数;k0、c0分别为车辆半轴与轮胎的当量扭转刚度和旋转粘性阻尼系数;ia1为主减速器1的速比,与1、2、5、6挡位相连;ia2为主减速器2的速比,与3、4、R挡位相连.
通过对混合动力传动系统进行动力学分析,建立混合动力汽车驱动系统行进间起动发动机与换挡协调控制过程的动力学方程:
(1)
式中:θ1、θ2、θ3、θ4、θ7、θw分别为ω1、ω2、ω3、ω4、ω7、ωw的角位移;Iq12为动力传递路线上相关构件转换到车辆半轴的当量转动惯量.
1.2发动机特性
发动机模型是混合动力驱动系统研究的关键参数,文中采用发动机稳态试验测试方法来确定发动机的数值模型.通过发动机台架试验分别测试不同节气门开度和转速下发动机的输出转矩.根据发动机测试数据,采用三次样条插值拟合得到发动机的稳态转矩数值模型,如图3(a)所示.利用发动机台架试验测试不同转速和输出转矩下发动机的燃油消耗,得到发动机效率数值模型,如图3(b)所示.

(b)效率模型
1.3ISG电机特性
通过发动机台架试验测试电机在不同转速下的最大扭矩,得到ISG电机外特性曲线(见图4(a)).其中,在基速2 500r/min之前为ISG电机的恒转矩区域,在基速点之后为ISG电机的恒功率区域,电机可保持恒定功率,最大值为30kW.采用样条插值方法进行电机效率测试实验,得到电机系统效率、转矩与转速的关系曲面图(见图4(b)).
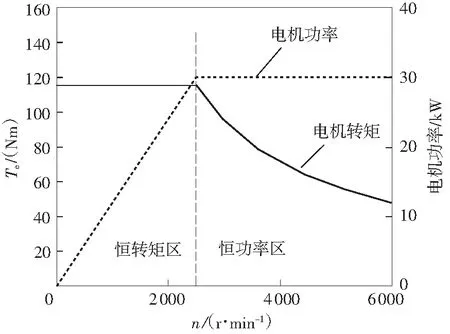
(a)ISG电机外特性
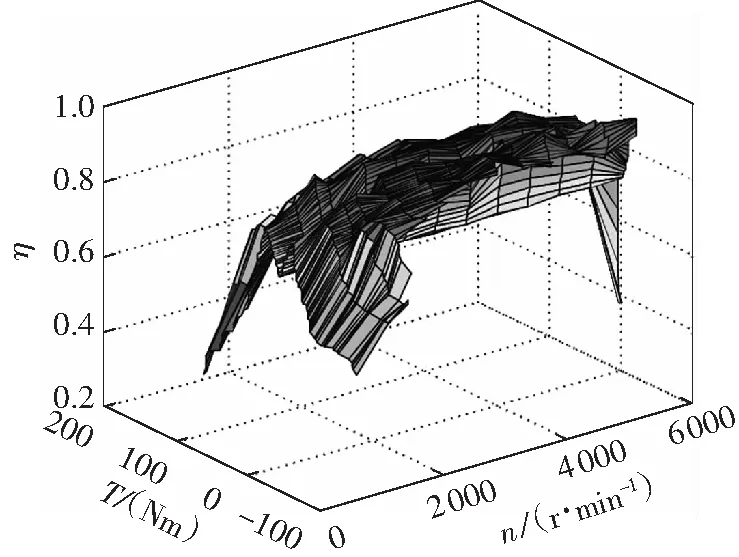
(b)ISG电机效率模型
2 工作模式区域与换挡规律分析
开展模式切换与换挡协调控制是为了解决装备双离合器自动变速器的混合动力汽车模式切换与换挡冲突问题.文中通过基于规则的系统效率最优方法划分系统工作模式范围,建立经济性换挡规律,制定混合动力汽车综合工作规律,确立模式切换与换挡冲突点,为模式切换和换挡协调控制策略的制定奠定基础.
2.1工作模式效率分析
以混合驱动模式为例,车辆处于该模式下系统的动力学方程如下:
(2)
式中,iDCT、ia分别为DCT速比和主减速器速比,Iq为相关构件等效到车轮的转动惯量,ηt为车辆动力传动系综合效率,u为车辆实时车速.
混合动力汽车系统效率定义为系统输出功率Pout与输入功率Pin之比,而混合驱动模式下系统输入功率为系统动力源发动机和动力电池组输出功率,输出功率为车辆需要克服的外界阻力功率.因此,该模式下功率计算表达式为
(3)
联立式(2)和式(3)建立混合驱动模式下的系统效率模型,如图5(a)所示.将图5(a)所示系统效率三维图投影到加速度与车速平面,相邻挡位系统效率存在相交线,以此交线作为混合驱动模式下的升挡规律曲线,如图5(b)所示.
同理,可以得到纯电动模式、发动机单独驱动模式和行车充电模式下的系统效率模型以及升挡规律,如图6所示.
2.2工作模式规律分析
将图5和图6中各工作模式下的系统效率投影
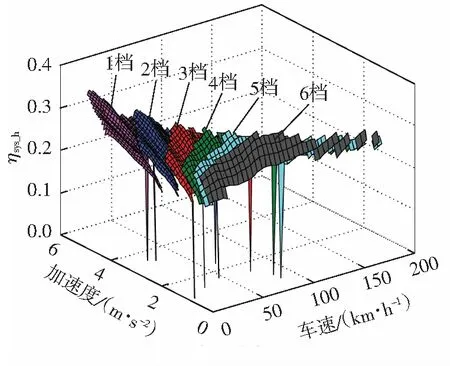
(a)系统效率
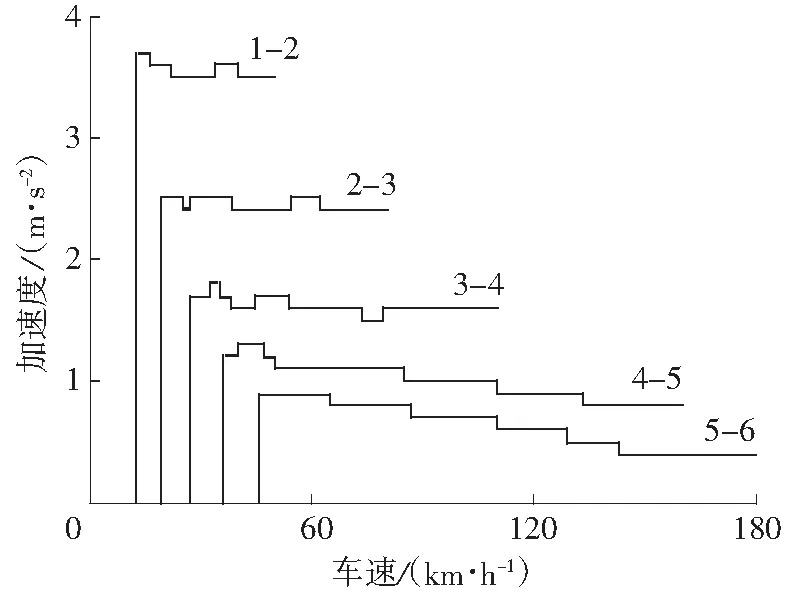
(b)升挡规律
Fig.5Systemefficiencyandupshiftscheduleinhybriddrivemodel
在速度-加速度平面上,选择各工作模式下系统效率较高的区域作为该模式下的工作范围,得到如图7(a)所示的混合动力汽车工作模式范围.
将图5和图6中各工作模式下的升挡规律曲线与图7(a)中工作模式范围整合在一起,即可得出混合动力汽车的综合工作规律.为防止频繁模式切换或换挡,对混合动力汽车综合工作规律进行修正,经过简化处理,得到如图7(b)所示修正后的混合动力汽车综合工作规律.
由图7(b)可以看出,模式切换曲线与换挡规律曲线存在相交的地方,即模式切换命令与换挡命令存在同时触发情况,故整车控制器需要设立一个优先级来确定优先进行的动作,或者采取某种措施以避免同时进行模式切换与换挡操作过程.基于DCT的特殊结构,文中提出的混合动力汽车工作模式切换与换挡协调控制策略是在DCT进行换挡的同时进行模式切换操作.因篇幅有限,文中以行进间起动发动机与1挡升2挡协调控制过程进行详细研究.

图6其他模式下的系统效率及升挡规律
Fig.6Systemefficiencyandupshiftscheduleinotherdrivemodels

(a)工作模式范围

(b)综合工作范围
3 模式切换与换挡协调控制策略
模式切换与换挡协调控制的大体思想是:在DCT进行换挡操作的同时进行工作模式的切换操作.由于换挡过程中DCT离合器处于滑摩状态,换挡过程的整车冲击度仅与DCT离合器传递转矩相关,因此,整个模式切换过程不会对整车平顺性造成影响.
行进间起动发动机与升挡协调控制流程及时序如图8所示,下面分7个阶段分别进行阐述.


图8行进间起动发动机与升挡协调控制流程及时序
Fig.8Flowchartofenginestartandupshiftcoordinationcontrolandshiftingsequencewhiledriving
TC2_tari2ia1=Tout-TC1_acti1ia1
(4)
式中:TC2_tar为离合器C2的动态目标转矩;Tout为模式切换与换挡控制之前变速器的输出端转矩,Tout=Tmi1ia1;TC1_act为离合器C1传递的实时转矩.
4 仿真与结果分析
利用Matlab/Simulink软件仿真平台建立行进间起动发动机与换挡协调控制过程的仿真模型,并嵌入所制定的协调控制策略进行离线仿真,仿真参数如下:整车质量为1 450kg,主减速器速比为3.762,轮胎有效半径为0.307m,滚动阻力系数为0.015,风阻系数为0.316,迎风面积为2.22m2,传动效率为0.9.以车速为11.7km/h、整车加速度为1.2m/s2、发动机点火转速为250r/min进行行进间起动发动机与1升2挡协调控制过程仿真,结果如图9所示.由图中可以看出,在行进间起动发动机与升挡协调控制过程中,控制系统较好地完成了模式切换与升挡动作,协调控制过程中未出现离合器从动部分转速高于主动部分转速而传递负扭矩以及功率在DCT两离合器之间循环的情况,从而保证了动力的有效输出,整车车速波动较小,冲击度小于10m/s3,满足相关性能要求.同时,整个协调控制过程持续时间为0.543s,小于先、后进行模式切换与换挡时间之和[7,15],减少了模式切换与换挡过程中主离合器和DCT离合器的重复动作,充分发挥了装备DCT的混合动力系统的结构优势,该模式切换与换挡协调控制策略有效提升了装备DCT的混合动力系统的性能.

图9行进间起动发动机与升挡协调控制仿真结果
Fig.9Simulationresultsofenginestartandupshiftcoordinationcontrolwhiledriving
5 结论
(1)根据装备DCT的单电机重度混合动力系统结构进行了行进间起动发动机与换挡协调控制过程的动力学分析,并对车辆传动系统关键部件进行了分析与建模,为整车工作模式的分析以及系统效率的计算奠定基础;
(2)通过基于规则的系统效率最优方法对混合动力汽车各工作模式进行分析,同时划分系统工作模式范围并建立经济性换挡规律,制定了混合动力汽车的综合工作规律,获取了模式切换与DCT换挡的重叠点,为行进间起动发动机与换挡协调控制的研究奠定理论基础;
(3)在Matlab/Simulink平台搭建了动力学模型,制定了行进间起动发动机与换挡协调控制策略,并进行了离线仿真,结果表明,文中所建立的行进间起动发动机与升挡协调控制方法是正确的,协调控制策略是有效的,不仅解决了装备DCT的混合动力汽车模式切换与换挡冲突的问题,而且在较大程度上节省了模式转换与换挡时间.
[1]MIChris,MASRURMAbul,GAODavidWenzhong.Hybridelectricvehicles:principlesandapplicationswithpracticalperspectives[M].Hoboken:JohnWiley&Sons,2011.
[2]SONGMinseok,OHJoseph,KIMHyunsoo.Engineclutchcontrolalgorithmduringmodechangeforparallelhybridelectricvehicle[C]∥Proceedingsof2012IEEEVehiclePowerandPropulsionConference.Seoul:IEEE,2012:1118-1121.
[3]DUANWei,YANFuwu,DUChangqing.Powertraincontrolstrategiesoverviewforhybridelectricvehicles[C]∥Proceedingsof2010Asia-PacificPowerandEnergyEngineeringConference.Chengdu:IEEE,2010:1-5.
[4]沈文臣,胡宇辉,于会龙,等.基于“虚拟离合器”的混合动力车辆AMT换挡过程控制 [J].机械工程学报,2014,50(18):108-117.
SHENWen-chen,HUYu-hui,YUHui-long,etal.ShiftingprocesscontrolofAMTbasedonvirtualclutchtechnologyforhybridelectricvehicle[J].JournalofMechanicalEngineering,2014,50(18):108-117.
[5]赵丁选,李天宇,康怀亮,等.混合动力工程车辆自动变速技术 [J].吉林大学学报(工学版),2014,44(2):358-363.
ZHAODing-xuan,LITian-yu,KANGHuai-liang,etal.Automaticshifttechnologyofhybridpowerengineeringvehicle[J].JournalofJilinUniversity(EngineeringandTechnologyEdtion),2014,44(2):358-363.
[6]STUBBSB,FRACCHIAPM.eDCT:4speedseamless-shifttechnologyforelectricvehicles[C]∥ProceedingsofHybridandElectricVehiclesConference2013.London:IET,2013:1-5.
[7]刘永刚,秦大同,刘振军,等.单电机重度混合动力系统行进间起动发动机控制策略研究 [J].汽车工程,2015,37(1):49-54.
LIUYong-gang,QINDa-tong,LIUZhen-jun,etal.Aresearchonthecontrolstrategyforenignestartingwhiledrivinginafullhybridpowersystemwithsinglemotor[J].AutomotiveEngineering,2015,37(1):49-54.
[8]SMITHAnthony,BUCKNORNorman,YANGHong,etal.Controlsdevelopmentforclutch-assistedenginestartsinaparallelhybridelectricvehicle[C]∥SAETechnicalPapers.Warrendale:SAEInternational,2011,doi:10.4271/2011-01-0870.
[9]VanBERKELKoos,HOFMANTheo,SERRARENSAlex,etal.Fastandsmoothclutchengagementcontrolfordual-clutchtransmissions[J].ControlEngineeringPractice,2014,22:57-68.
[10]OHJiwonJ,CHOISeibumB,KIMJinsung.Drivelinemodelingandestimationofindividualclutchtorquedu-ringgearshiftsfordualclutchtransmission[J].Mechatronics,2014,24(5):449-463.
[11]秦大同,杜波,段志辉,等.某型混合动力汽车AMT换挡控制策略的研究 [J].汽车工程,2013,35(11):1004-1010.
QINDa-tong,DUBo,DUANZhi-hui,etal.AstudyontheshiftcontrolstrategyfortheAMTinaspecifichybridelectricvehicle[J].AutomotiveEngineering,2013,35(11):1004-1010.
[12]LIWeiqing,HEHongwen,PENGLianyun,etal.ShiftingprocessstudyonAMTofaparallelhybridelectricvehicle[C]∥Proceedingsof2011the4thInternationalConferenceonPowerElectronicsSystemsandApplications.HongKong:IEEE,2011:1-7.
[13]ZHAOZ-G,CHENH-J,YANGY-Y,etal.Torquecoordinatingrobustcontrolofshiftingprocessfordrydualclutchtransmissionequippedinahybridcar[J].VehicleSystemDynamics,2015,53(9):1269-1295.
[14]赵治国,王琪,陈海军,等.干式DCT换挡模糊时间决策及转矩协调控制 [J].机械工程学报,2013,49(12):92-108.
ZHAOZhi-guo,WANGQi,CHENHai-jun,etal.Fuzzytimedecisionandmodel-basedtorquecoordinatingcontrolofshiftingprocessfordrydualclutchtransmission[J].JournalofMechanicalEngineering,2013,49(12):92-108.
[15]LIUYonggang,QINDatong,JIANGHong,etal.Shiftcontrolstrategyandexperimentalvalidationfordrydualclutchtransmissions[J].MechanismandMachineTheory,2014,75:41-53.
SupportedbytheNationalNaturalScienceFoundationofChina(51305468)andtheMajorApplicationDevelopmentProjectinChongqing(cstc2015yykfc60003)
CoordinationControlofEngineStartingandDCTShiftingofHybridElectricVehiclesWhileDriving
LIU Yong-gang1CHEN Liang2QIN Da-tong1LEI Zhen-zhen1,3WU Rui1
(1.StateKeyLaboratoryofMechanicalTransmission∥SchoolofAutomotiveEngineering,ChongqingUniversity,Chongqing400044,China; 2.ShanghaiAutomobileGearWorksCo.,Ltd.,Shanghai201807,China;3.SchoolofMechanicalandPowerEngineering,ChongqingUniversityofScienceandTechnology,Chongqing401331,China)
Onthebasisofthedistinctivestructureandperformanceadvantagesofdualclutchtransmission(DCT),asingle-motorfullhybridelectricsystemequippedwithDCTisproposedanditskineticmodelisconstructed.Then,therule-basedmethodisadoptedtoanalyzethescopeofworkingmodeandthescheduleofeconomicalshiftbytakingtheoptimalsystemefficiencyastheobjective,andacomprehensiveworkingscheduleofmodeswitchingandDCTshiftingisformulatedforhybridelectricvehicles(HEV).Inviewoftheintersectionbetweenmodeswit-chingpointsandshiftingpointsinthecomprehensiveworkingschedule,thecoordinationcontrolstrategyandmethodofmodeswitchingandshiftingareproposed.Finally,ontheMatlab/Simulinkplatform,theenginestartingandupshiftingcoordinationcontrolwhiledrivingisanalyzedbysimulations.Theresultsindicatethattheproposedcoordinationcontrolstrategyofenginestartingandshiftingwhiledrivingiseffectiveinimprovingtheperformanceoftheproposedsystem,specifically,itcanavoidtheclashbetweenmodeswitchingandshiftingwithmuchlessmodeswitchingandshiftingtime,whichmeansthatthestructureadvantageoftheproposedsystemarefullyutilized.
hybridelectricvehicles;dualclutchtransmission;modeswitching;shifting;controlstrategy
1000-565X(2016)09-0123-08
2015-11-20
国家自然科学基金资助项目(51305468);重庆市应用开发计划重大项目(cstc2015yykfc60003);重庆大学中央高校基本科研业务费专项资金资助项目(106112016CDJXY330001)
刘永刚(1982-),男,博士,副教授,主要从事车辆动力传动及其综合控制研究.E-mail:andyliuyg@cqu.edu.cn
U469.72
10.3969/j.issn.1000-565X.2016.09.018
猜你喜欢
电机与控制学报(2022年6期)2022-07-15
防爆电机(2022年2期)2022-04-26
自动化学报(2017年4期)2017-06-15
汽车维修技师(2017年9期)2017-02-04
通信电源技术(2016年1期)2016-04-16
中国塑料(2015年3期)2015-11-27
空间控制技术与应用(2015年2期)2015-06-05
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
中国塑料(2014年12期)2014-10-17