基于虚拟样机的倾斜导轨式3-PRS并联机器人的设计与分析
2016-10-26 07:39黄秀琴潘晨
常州工学院学报 2016年4期
黄秀琴,潘晨
(常州工学院机械与车辆工程学院,江苏常州213002)
HUANG Xiuqin,PAN Chen
(School of Mechanical and Vehicle Engineering,Changzhou Institute of Technology,Changzhou 213002)
(a)x方向位置图
(b)y方向位置图
(c)z方向位置图
(d)x方向速度图
(e)y方向速度图
(f)z方向速度图
(g)x方向加速度图
(h)y方向加速度图
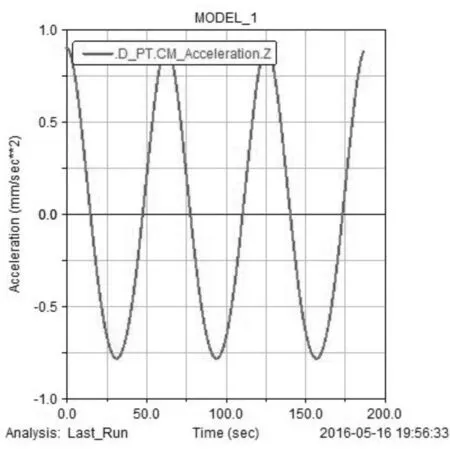
(i)z方向加速度图
基于虚拟样机的倾斜导轨式3-PRS并联机器人的设计与分析
黄秀琴,潘晨
(常州工学院机械与车辆工程学院,江苏常州213002)
以3-PRS并联机器人为研究对象,采用倾斜导轨式布置3个滑块为驱动,应用虚拟样机技术,在SolidWorks和Adams平台上进行了并联机器人的建模、仿真和运动学分析,从而获得该机构的运动特性曲线,为并联机器人机构学的发展和潜在的工业应用提供了理论基础。
3-PRS;并联机器人;运动学仿真
HUANG Xiuqin,PAN Chen
(School of Mechanical and Vehicle Engineering,Changzhou Institute of Technology,Changzhou 213002)
并联机器人因其在结构上有较大的刚度、较强的承载能力以及累积误差小等特点,逐渐引起国内外学术界和工程界的广泛关注。而3、4、 5自由度的少自由度并联机器人机构,是并联机器人机构学研究领域的一个重要分支,尤其是3自由度并联机器人机构具有结构简单、刚度大、低惯性、负载高、运动速度快等特点,成为并联机器人机构学研究的热点之一。并联机器人的机构学与运动学分析主要研究并联机器人机构的运动学、工作空间、奇异位形和灵巧度分析等方面。该项研究是实现并联机器人的控制和应用研究的基础,因而在并联机器人机构学的研究中占有重要地位。并联机器人机构凭借其卓越的性能,逐渐在现代先进制造装备中得到广泛应用。
本文设计构造了一种一平移二转动并联机器人机构,并对其进行了三维实体结构设计和基于ADAMS的运动学仿真,分析了动平台输出运动特性,为该并联机器人机构潜在的工业应用及实时控制奠定了理论基础。
1 机构描述
并联机器人机构由下静平台、上动平台和连接于两平台之间的3条支链PRS组成,静平台和动平台通过3组连杆和滑块相连,静平台和滑块之间采用移动副,滑块与连杆之间采用转动副,连杆与动平台之间采用球铰副(见图1)。
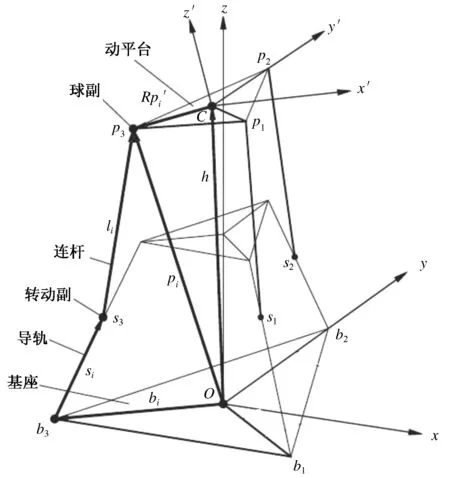
图1 并联机器人机构简图
整个模型通过滑块在固定导轨上的移动来改变动平台的位置和姿态,该并联机器人能实现一平移二转动的运动输出[1-3]。
2 3-PRS虚拟样机实体建模设计
3-PRS虚拟样机为框架式结构,由静平台组件、导轨-传动组件、动平台组件和支链组件等主要部件组成。通过特殊设计的导轨-传动体组件,将滚珠丝杠的运动与滑块联系起来,带动连杆与球铰的运动,实现动平台的空间运动。丝杠的运动传递与连接形式、动平台和定平台等是设计的重点[4]。
2.1导轨-传动体组件
导轨-传动体组件是3-PRS并联机器人中关键的运动传递部件,由梁、传动体和2根导轨组成,导轨固定在梁上。传动体为特殊设计的构件,它包括丝杠和滑块,滑块中部与滚珠丝杠连接,两端孔与导轨进行同心配合,上部分与支链组件进行转动副连接,下底面与梁平行移动。导轨-传动体组件的模型组件见图2。
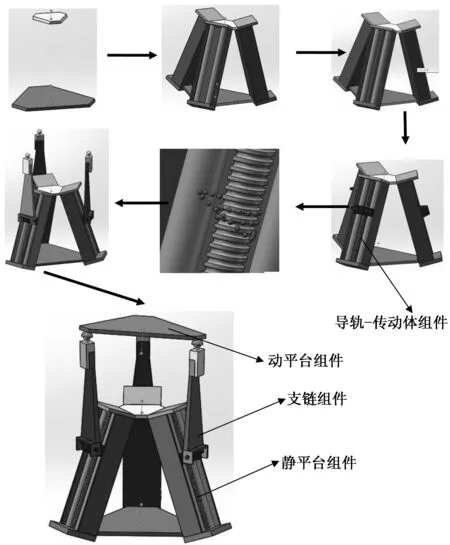
图2 倾斜导轨式3-PRS并联机器人模型装配过程
2.2静平台组件
静平台是滚珠丝杆、导轨、伺服电机的安装平台,由上下固定板、支板、导轨-传动体组件等组成,3个导轨-传动体组件的安装呈110°。静平台组件的模型如图2所示。
2.3支链组件
支链组件是机构中连接上下平台的重要组件,也是传递运动的中间纽带。支链组件下端通过同心配合连接滑块,上端通过球铰与静平台连接。支链组件的模型如图2所示。
2.4动平台组件
动平台是主轴电机、刀具或测头的安装平台,是比较重要的部件。动平台的质量和体积应该尽量小,否则会增大机构的运动质量。动平台组件的模型如图2所示。
2.5虚拟样机的装配及运动检查
在3-PRS并联机器人的装配中需要注意的是,对导轨-传动体等运动部件不能用零部件阵列功能,否则会使完成的装配体中的运动部件不能运动,无法进行运动检查,也不能进行运动学和动力学分析。装配过程如图2所示。
装配完成后,可以利用装配环境的移动功能检查机构是否能正常运动。如果发现有问题,应该及时检查约束配合部分是否有问题。
该模型的建立能真实地反映出并联机器人各部分零件的具体结构,为机器人设计制造提供第一手的图纸资料。
3 基于Adams的并联机器人的运动学仿真
并联机器人运动学仿真的目的是为了检查各部件与运动副之间的相对运动关系,验证机构设计的正确性以及各支链之间是否会产生干涉,并且考察并联机器人系统的速度和加速度特性。
3.1仿真流程
Adams的仿真一般分为以下几个步骤:首先,建立机器人机构模型;其次,利用Adams软件自带的约束库对机构的运动副添加约束;最后,在驱动副上添加驱动并设置驱动参数。本文采用SolidWorks软件进行建模和装配,再将模型导入到Adams软件中进行仿真,其仿真流程图[5]如图3所示。
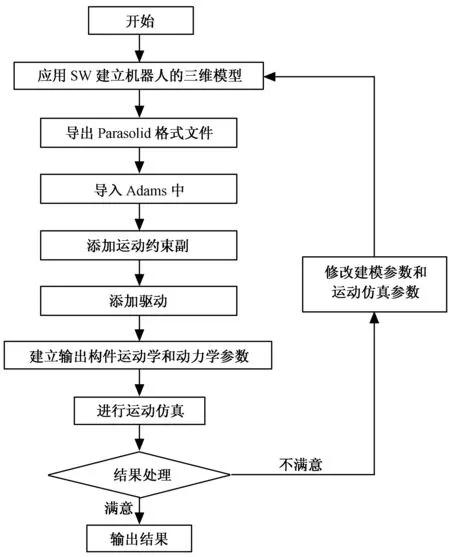
图3 仿真流程图
3.2简化模型和仿真
为了提高仿真的精度和效率,有必要对所建的模型进行简化处理。在不改变机构自由度的前提下,多个零件固结在一起简化为1个零件,并且尽可能地简化运动副的结构和动平台及静平台的构造,降低仿真计算过程中的误差,最后忽略整个模型的重力。图4即为机器人机构的简化模型图。简化后模型由动平台和静平台(机架)及3个相同支链组成,其中静平台为三角锥的双层结构,三角锥的上下面均为正三角形,同理动平台也为正三角形结构,驱动滑块布置在静平台3个倾斜的导轨上,实现对整个机器人的驱动,实际设计用滚珠丝杠驱动。
3.3仿真的实现
对简化的模型添加约束和驱动,导轨与滑块之间为移动副,滑块与连杆之间为转动副,连杆与动平台之间为球副,驱动则加在3个移动副上(见图4)。
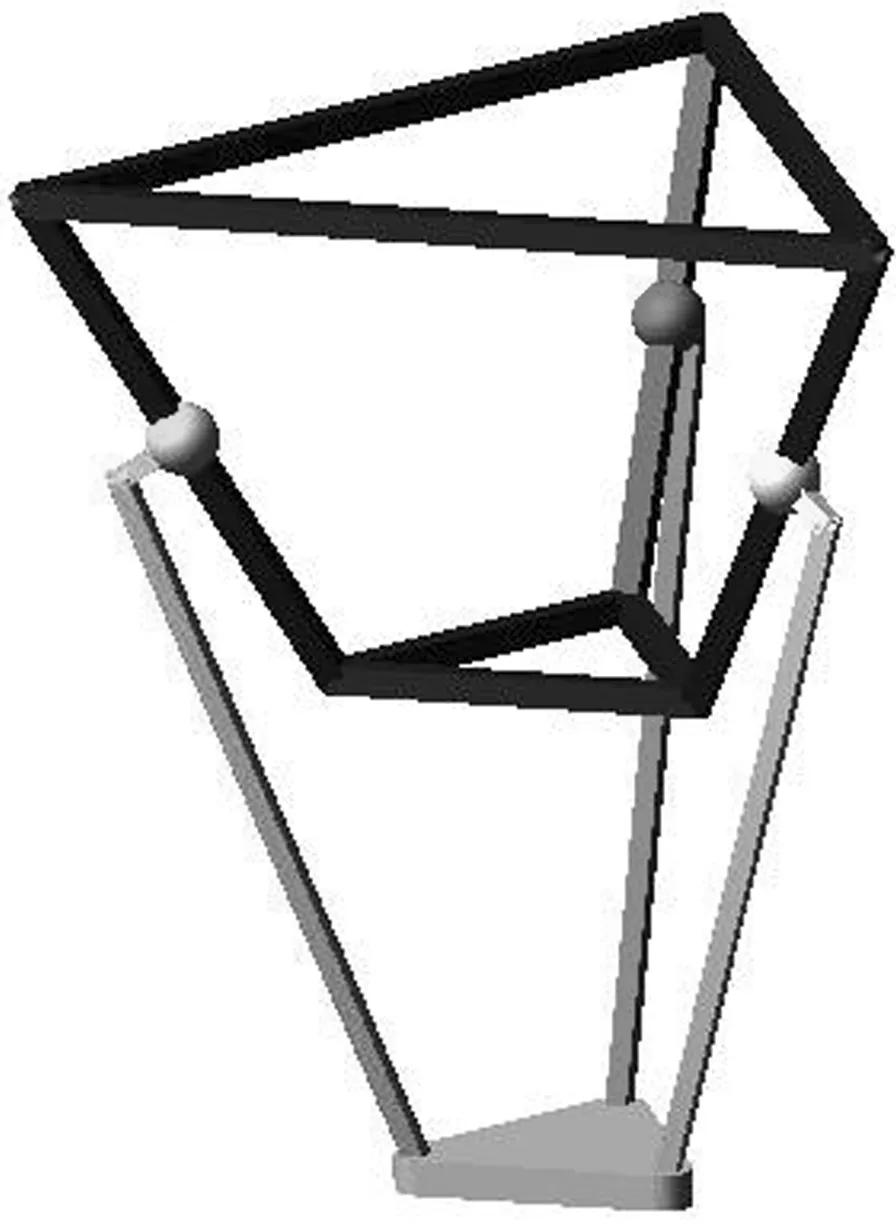
图4 简化的模型图
对于倾斜导轨式3-PRS并联机器人的运动学正解分析,已知驱动滑块运动规律,求解动平台的位置或者姿态。
假设:静平台上三角边长为1 020 mm;静平台下三角边长为300 mm;动平台三角边长为340 mm;连杆长度为800 mm;导轨长度为877.5 mm。另外,给定滑块驱动函数分别为:①MOTION_1为60*cos(0.1*time);②MOTION_2为80*cos(0.1*time);③MOTION_3为100*cos(0.1*time)。
经过仿真后处理,可以得出如图5所示动平台参考点上的运动规律图。
通过仿真图可知:当给定的滑块运动规律为余弦函数时,动平台的加速度曲线为光滑的连续曲线,不存在突变。因此,运动特性较好,没有惯性冲击,是一种较为理想的机器人机构。
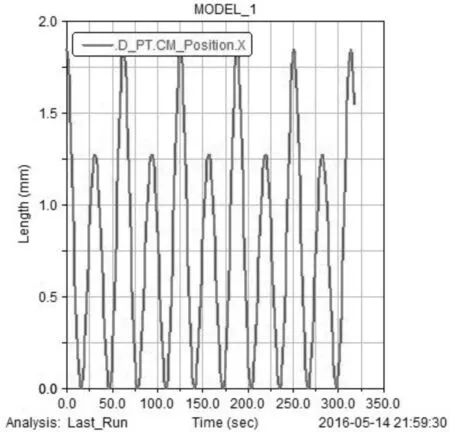
(a)x方向位置图
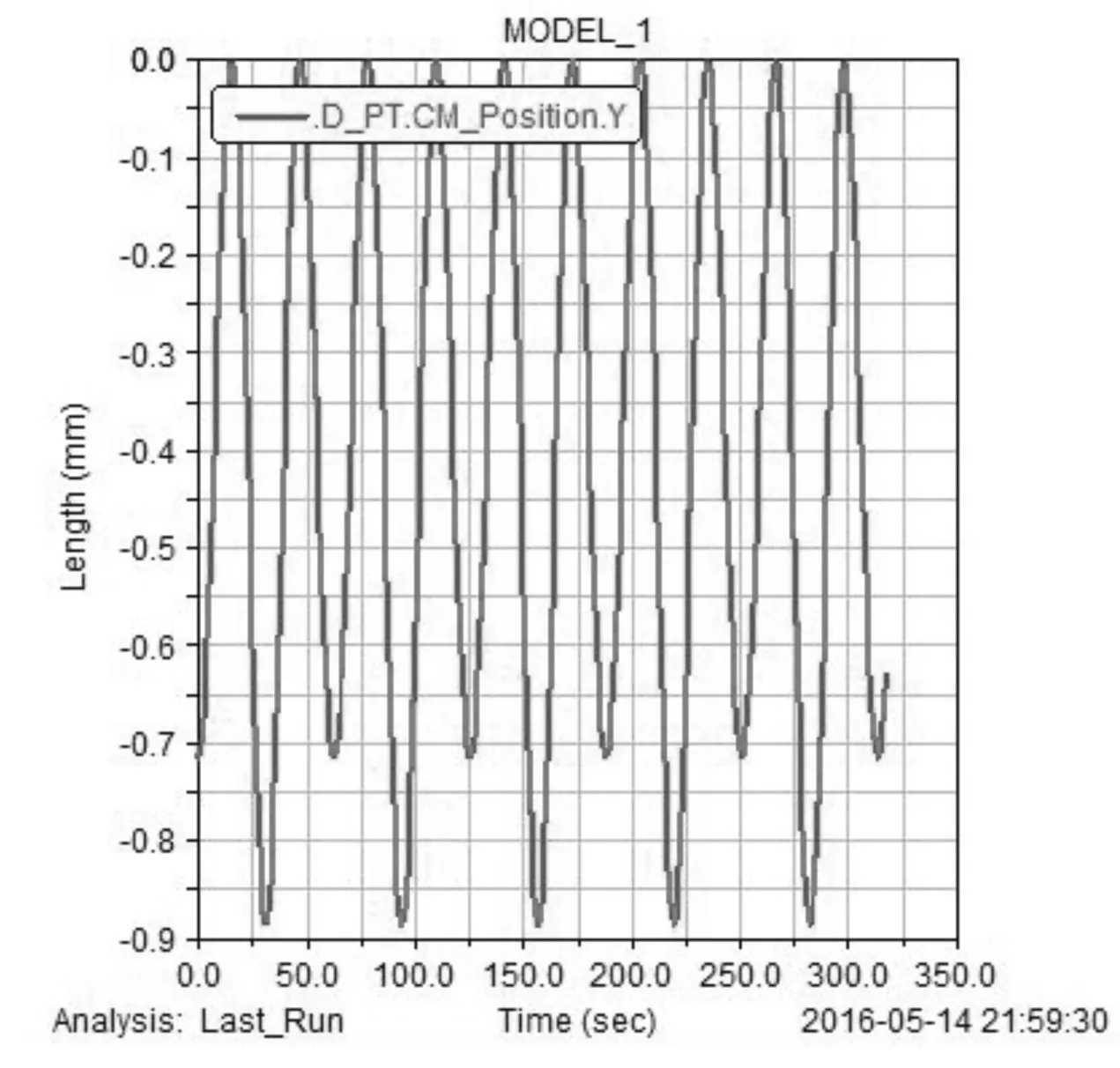
(b)y方向位置图
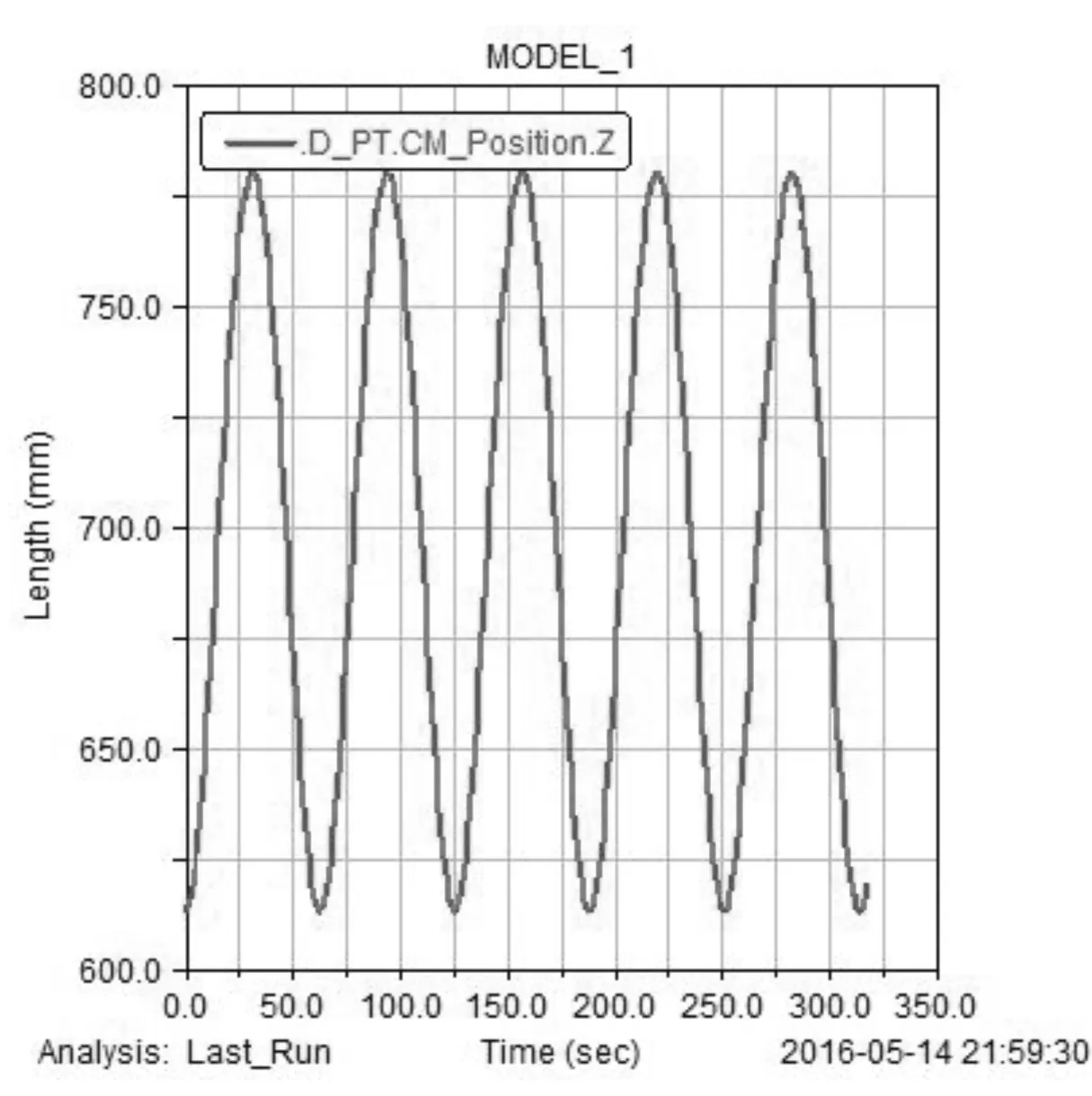
(c)z方向位置图
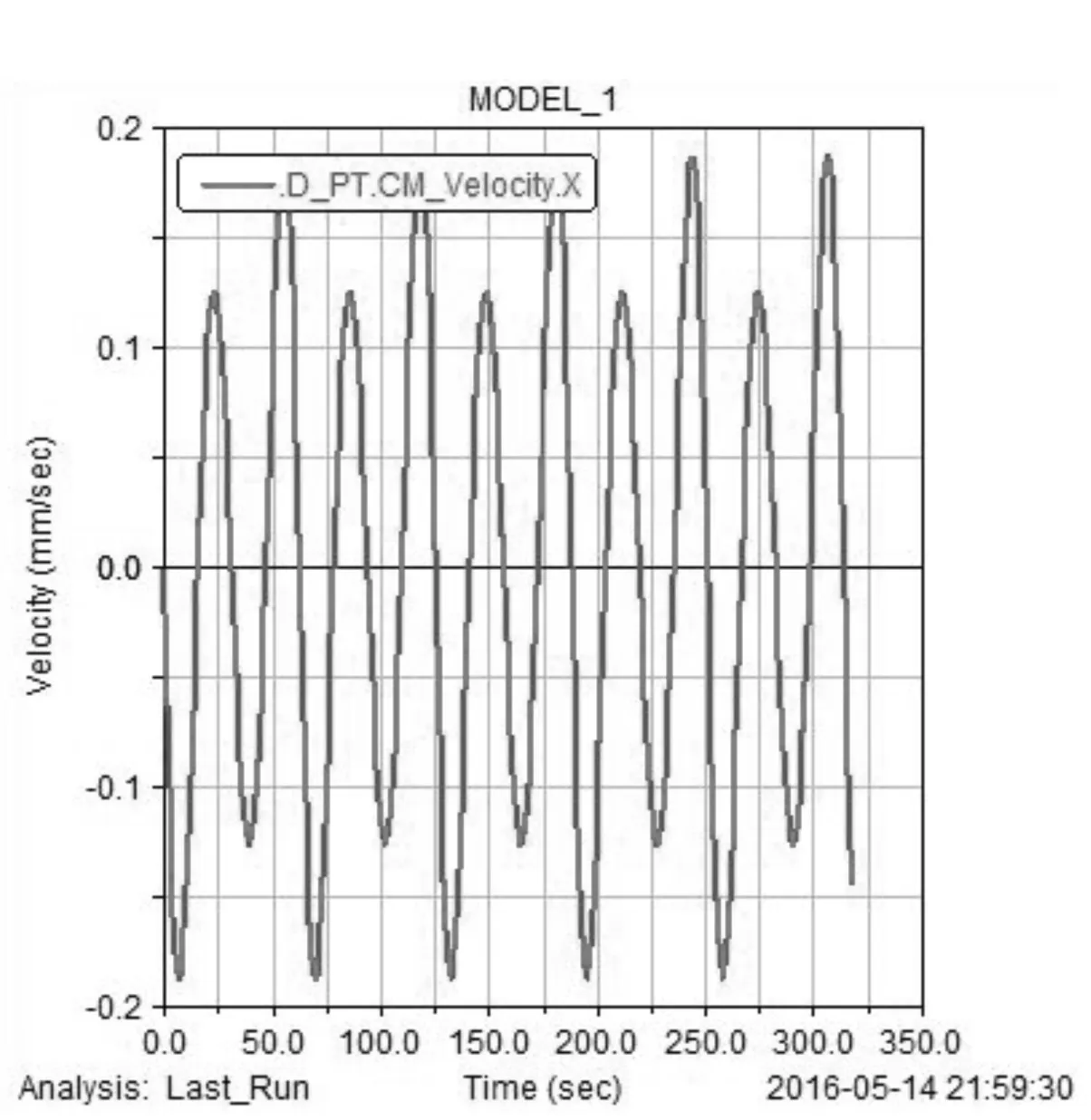
(d)x方向速度图

(e)y方向速度图
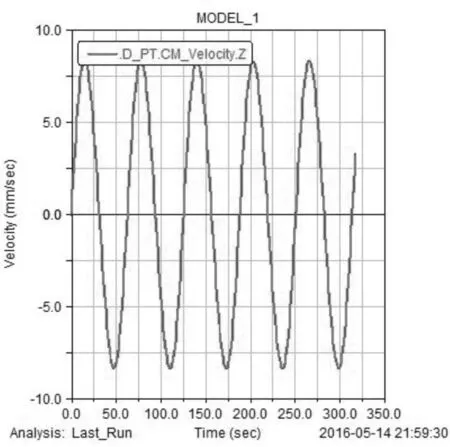
(f)z方向速度图
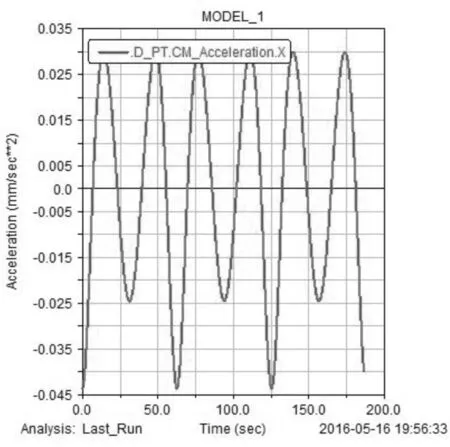
(g)x方向加速度图
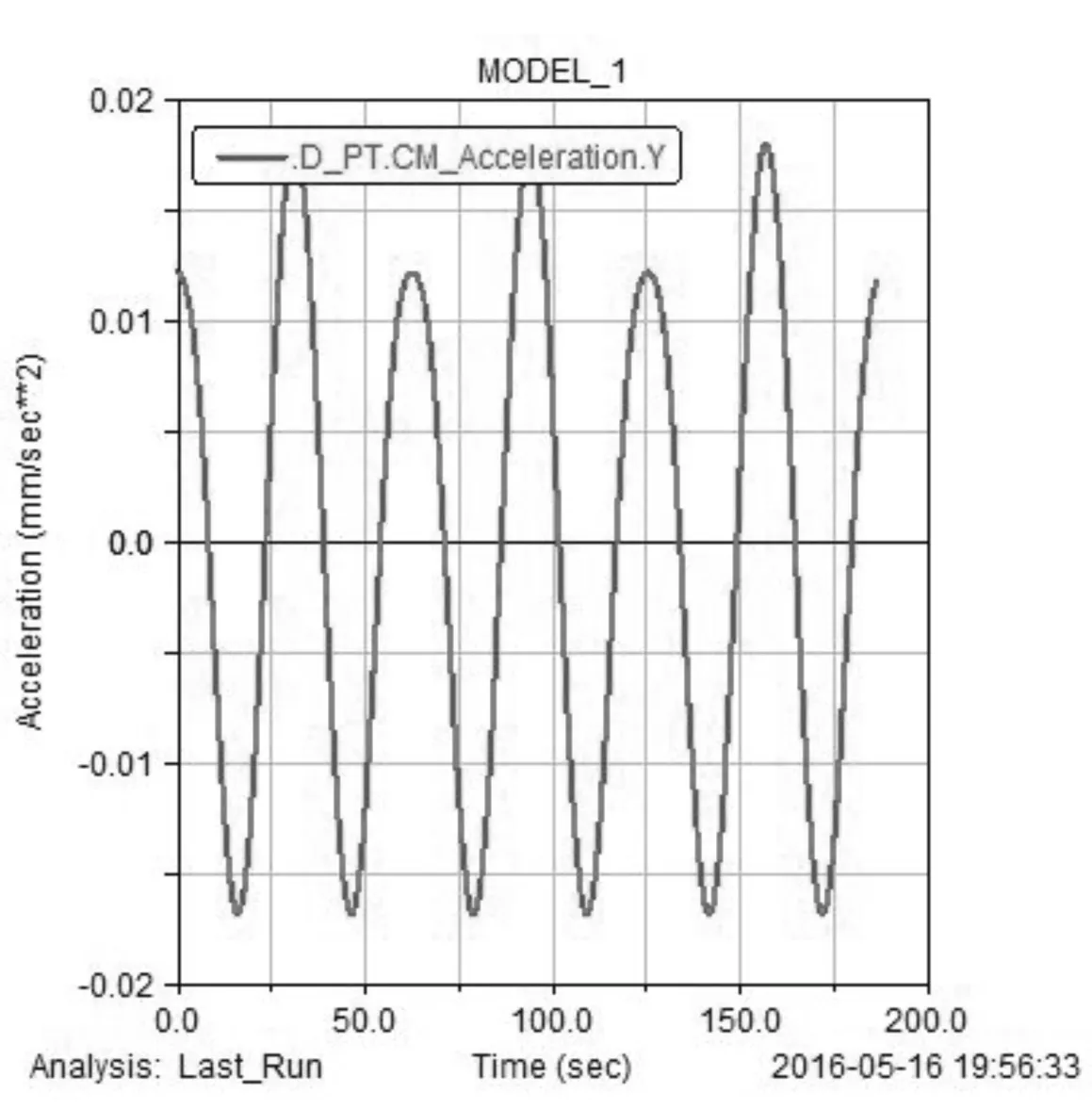
(h)y方向加速度图
(i)z方向加速度图
图5仿真特性曲线图
4 结论
本文以3-PRS并联机器人机构为研究对象,改变传统结构形式,将驱动滑块布置在倾斜导轨上来提高滑块的行程。
1)在SolidWorks平台上对3-PRS并联机器人实现了三维实体设计,在设计上进行了结构的细化,采用滚珠丝杠驱动,从中可以观察出该并联机器人机构的具体构造和构件之间的连接方式。
2)将机器人机构的模型进行简化并导入到Adams软件中,通过仿真获得动平台上参考点的位移、速度和加速度曲线。验证和考察了该并联机器人机构的工作原理和运动特性,为该机器人机构的工业化应用奠定了理论基础。
[1]葛胜兰.3PRS并联机器人运动仿真的实现[J].机械研究与应用,2006,19(4):82-83.
[2]金琼.过约束机构与欠秩并联机器人机构研究[D].南京:东南大学,2001.
[3]黄真,孔令富,方跃法.并联机器人机构学理论及控制[M].北京:机械工业出版社,1997.
[4]刘峰,陈文凯.3自由度并联机器人的研究现状和应用前景[J].企业技术开发,2006(1):9-10.
[5]李增刚.Adams入门详解与实例[M].2版.北京:国防工业出版社,2014.
责任编辑:陈亮
Design and Analysis on a 3-PRS Parallel Robot with Inclined Guide Rail Based on the Virtual Prototype
The 3-PRS parallel robot was studied and three driving sliders were arranged with inclined guide rails.Modeling,simulation,kinematic analysis of parallel robot were carried out on the ADAMS platform by using virtual prototype technology to obtain the motion characteristic curve of the mechanism,which provided a theoretical basis for parallel robot mechanism development and potential industrial application.
3-PRS;parallel robot;kinematics simulation
10.3969/j.issn.1671-0436.2016.04.009
2016- 06- 01
黄秀琴(1969—),女,副教授。
TP242
A
1671- 0436(2016)04- 0039- 04
猜你喜欢
中学生数理化(高中版.高考理化)(2022年3期)2022-04-26
中学生数理化·中考版(2021年10期)2021-11-22
中国特种设备安全(2019年7期)2019-09-10
新能源科技(2018年10期)2018-02-15
婚姻与家庭·性情读本(2017年1期)2017-02-16
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
中国塑料(2015年9期)2015-10-14
制造技术与机床(2015年10期)2015-04-09