
水面舰艇目标融合识别过程模型分析*
2016-10-25 07:21:33黄力伟
舰船电子工程 2016年9期
李 军 黄力伟
(海军大连舰艇学院 大连 116018)
水面舰艇目标融合识别过程模型分析*
李军黄力伟
(海军大连舰艇学院大连116018)
如何利用水面舰艇装备的传感器准确及时地识别目标是取得海战胜利的关键,论文在研究数据融合的基础上,分析了水面舰艇传感器的划分及水面舰艇的目标分类,提出了一种水面舰艇目标融合识别模型,该模型的传感器子系统在利用水面舰艇装备的传感器获取目标信息的基础上,提取目标特征信息,并根据目标特征信息的输入独立判定目标类型,最后在模型的融合识别中心对各子系统的识别结果进行融合以确定目标的最终身份。
数据融合;目标识别;特征信息
Class NumberTP391.41
1 引言
在现代海战中信息来源广泛、信息形式多种多样,如何有效可靠地利用各种信息识别目标是克敌制胜的关键,虽然水面舰艇可以根据指挥中心提供的情报信息确定敌人的兵力调动和兵力组成,但是由于欺骗、干扰等一系列手段的运用,仅仅依靠情报信息判断目标类型是远远不够的,过去进行目标识别的人工方式已经不能满足高技术条件下的海战需要。为了有效综合利用信息源获得的信息对目标进行识别,下面在水面舰艇提取目标多特征的基础上,提出一种水面舰艇目标识别模型,从而采集、提取、融合目标的特征信息[1],以增强目标识别的可靠性和准确性。
2 数据融合层次
在多传感器数据融合过程中,由于融合数据的类型、传感器采集数据的方式和工程需要的不同,需要对数据分层次有步骤地进行融合。根据数据抽象层次和数据流通方式的不同,可以把数据融合划分为像素级融合、特征级融合和决策级融合[2]三个层次。
2.1像素级融合
像素级融合也被称为低级融合,是直接对各种传感器采样的原始数据进行融合操作。它的优点是能保持尽可能多的现场数据,由于信息损失较小,因此较其他融合层次能提供细微的信息。但是存在很明显的局限性:由于要融合的数据是经过很少加工甚至未经过加工的,因此计算量很大,这就对计算机的容量和速度提出了很高的要求,并且由于处理时间较长,导致实时性差;而且此种融合是在信息的最低层进行的,因此在没有纠错处理的情况下,融合不确定性、不完全性和不稳定性的原始数据会产生较大的误差;要求各个传感器采样的数据之间有精确到一个像素的很高的校准精度,故各个传感器必须为同质的;数据通行量大,抗干扰能力差。
像素级融合的方法主要有[3]:极大似然估计、最小二乘法、HIS变换、PCA变换、小波变换及加权平均等。
2.2特征级融合
特征级融合也被称为中级融合,它将传感器所传递的信息进行特征提取,随后对提取的特征信息进行综合处理。一般而言,特征信息是能表征像素信息的充分表示量或者统计量,然后以特征信息为基础对传感器数据进行分类、汇集和综合。由于特征级融合实现了一定程度的信息压缩,因此能较好地进行实时处理,并且一般所提取的特征信息都与决策分析有联系,因而融合结果能充分反映与决策分析相关的特征信息。
特征级融合的方法主要有[4]:聚类分析法、贝叶斯估计法、信息熵法等。
2.3决策级融合
决策级融是为指挥决策提供依据的高级融合,在特征级融合提供的各类特征信息的基础上,它采用融合技术解决具体的决策问题。作为三级融合的最后结果,它直接针对决策目标,影响指挥决策水平。它的主要优点有:在一个或者几个传感器发生错误时,通过适当的融合依然能得出正确的结果;处理信息量小,抗干扰能力强;构成系统的传感器可以是同质的也可以是异质的;系统对通信带宽要求不高。缺点是:由于要对各个传感器信息进行预处理,以获得各传感器的判定结果,因此代价比较高,并且信息损失量在三级融合中最大。
决策级融合的方法主要有[5]:专家系统、神经网路法、模糊集理论、可靠性理论以及逻辑模板法等。
3 水面舰艇传感器分类
按照舰艇上传感器工作机制不同,把水面舰艇装备的传感器分为四大类:舰载雷达、舰载声纳、舰载光电探测设备和舰载电子侦察设备[6],现分别介绍如下。
3.1舰载雷达
雷达是指用无线电方法对目标进行探测和测距。雷达的基本任务有两个,一是发现目标的存在,二是测量目标的参数,前者称为雷达检测,后者称为雷达参数提取或雷达参数估值。当雷达探测到目标后,就要从目标回波中提取有关信息,主要信息有:目标的空间位置—斜距和角度信息;目标位置的变化率—相对速度;加速度;目标回波的幅度起伏特性;极化特性;类型;敌我属性;目标的尺寸和形状;采用不同的极化可测量目标形状的对称性;原理上雷达还可测定目标的表面粗糙度及介电特性等。
而所谓舰载雷达是对装备在舰艇上的各种雷达的总称,亦称舰艇雷达。用于探测和跟踪海面、空中目标,为武器系统提供目标坐标等数据,引导舰载机飞行和着舰,保障舰艇安全航行和战术机动等。按其战术用途分为舰载搜索雷达、舰载火控雷达、航海雷达、舰载对空引导雷达和舰载多功能雷达等。
3.2舰载声纳
声纳是利用水下声波判断海洋中物体的存在、位置及类型的方法和设备。近年来,人们更将声纳的含义加以推广,以致凡是利用水下声波作为传播媒体,以达到某种目的的设备和方法都称之为声纳。然而人们更习惯于将声纳理解为具体的设备,因而凡是用声波对水下目标进行探测、定位、跟踪、识别,以及利用水下声波进行通信、导航、制导、武器的射击指挥和对抗等方面的水声设备皆属声纳这一范畴。当声纳对目标参数进行测量时,按照声纳工作方式的不同(主动与被动两类)可以把被测参数划分为两类,其中主动声纳从目标回波中提取下列信息:目标的空间位置—斜距和角度信息;目标位置的变化率—相对速度;加速度;目标回波的幅度起伏特性[7];类型;目标的亮点数量;目标的尺寸和形状等,被动声纳从目标的辐射噪声中提取如下信息:目标的轴频、目标的初始发现距离、辐射噪声的线谱特征、时域波形结构特征及平均功率谱特征等。
而所谓舰载声纳是对装备在舰艇上的各种声纳的总称。用于探测和跟踪海面、水下目标,为武器系统提供目标坐标等数据,保障舰艇安全航行和战术机动等。按其战术用途分为警戒声纳、攻击声纳、探雷声纳、导航声纳、通信声纳、侦察声纳和识别声纳等。
3.3舰载光电探测设备
光电装备以光电子技术为主要技术基础[8]。由于光电子学和半导体工艺的发展,生产出多种光电观测装备和器材,如:激光测距仪、激光雷达、红外热像仪、红外跟踪仪、电视跟踪仪、激光电视……等。而所谓舰载光电探测设备是对装备在舰艇上的各种光电设备的总称,主要有舰载红外警戒系统、舰用激光测距仪和舰载电视跟踪器。
3.4舰载电子侦察设备
电子侦察就是使用电子侦察设备对空中辐射的电磁信号进行搜索、截获、分选、分析和识别以及辐射源定位,以掌握对方辐射源的技术特性、威胁程度和兵力部署变动等情报的一种电子技术。针对水面舰艇而言,按截获信号的不同可分为雷达侦察设备、通信侦察设备、光电侦察设备和水声侦察设备。
4 水面舰艇目标分类
水面舰艇的目标分类问题一直是研究的重点和难点,分类的好坏直接关系目标识别的精确度和融合结果的准确性。按照水面舰艇识别目标的空间分布,可以把待识别目标划分为:空中目标、海上目标和水下目标三个大类。
结合表1中各类型传感器提取的目标特征,可以把水面舰艇目标分类细化如下:
空中目标为:大中型轰炸机、战斗机、侦察机、预警机、大中型运输机、大中型客机、普通飞机、直升机、导弹、鸟群。
海面目标为:航空母舰、巡洋舰、驱逐舰、护卫舰、登陆舰、扫雷舰、巡逻艇、大中型军辅船、渔船、水面快艇、大中型商船、普通小船。
水下目标为:核潜艇、常规潜艇、水下探测器、鱼雷、鱼群。
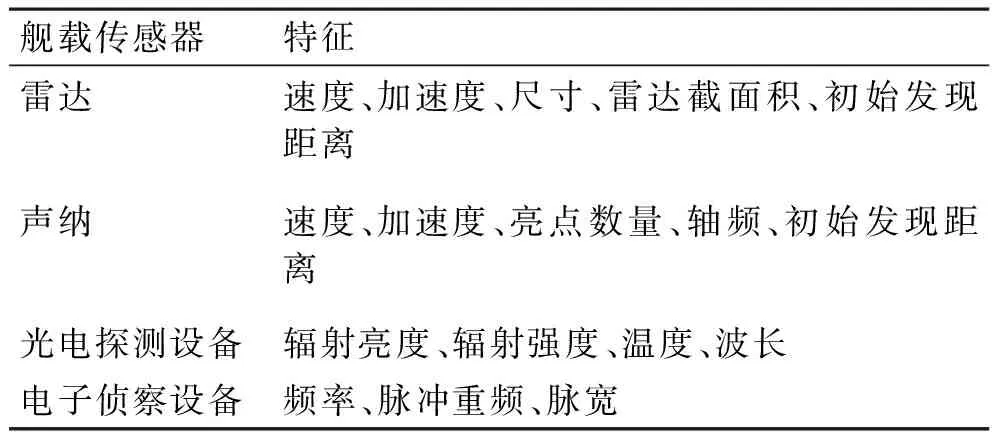
表1
5 水面舰艇目标识别过程模型
在水面舰艇目标识别中,获得的目标特征信息是多种多样的,提取的特征也各不相同,并且这些特征信息时常是有缺失的。因此,在水面舰艇目标融合识别中,常采用决策级融合模型。它在部分传感器系统无法工作的情况下依然具有较强的识别能力,为了清楚地说明水面舰艇目标识别的流程和各组成部分的功能,如图1所示,介绍一种决策级水面舰艇目标识别模型。在此模型中,主要包括预处理、特征提取、独立识别、决策融合四个部分[9],现对各部分功能作如下介绍。
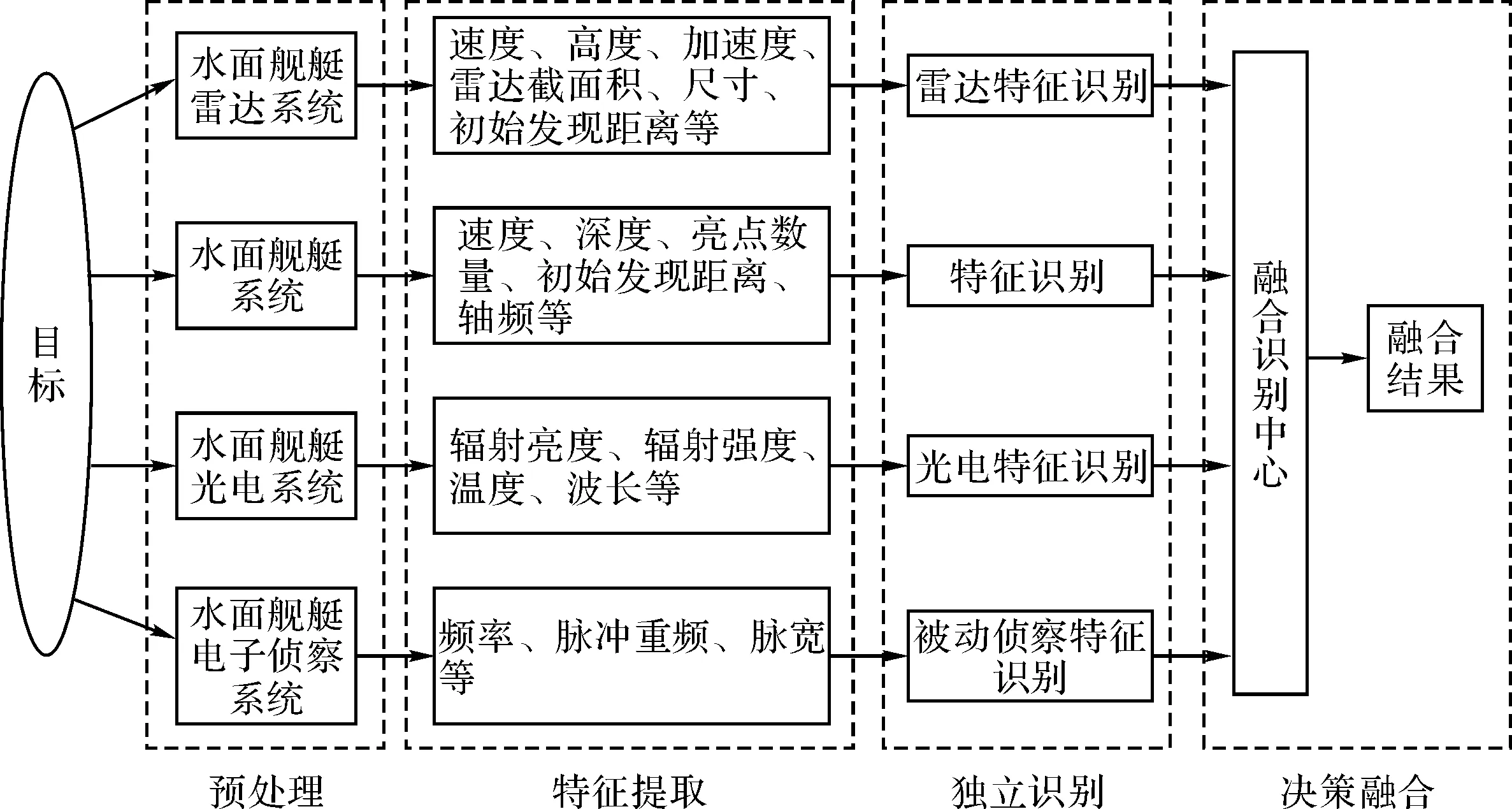
图1 水面舰艇目标融合识别过程模型
5.1预处理
预处理是对原始的目标信号进行收集和处理以提高信号的信噪比。它由水面舰艇雷达系统、水面舰艇声纳系统、水面舰艇光电系统和水面舰艇电子侦察系统四个部分构成,为了了解它的工作流程,以水面舰艇雷达系统为例,如图2所示,水面舰艇装备的雷达对目标进行探测并接收原始的目标信号,为了提高后续处理的信噪比,需要对原始目标信号进行时域积累,最后用数据级融合算法对时域积累后的信号进行处理,以提高融合信号的准确性和精度。预处理过程在提高整个系统的精确性的同时增强了系统的抗干扰能力。
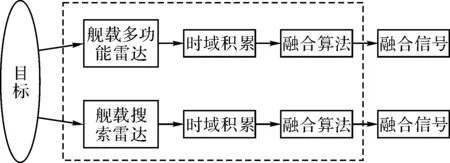
图2 水面舰艇雷达系统
5.2特征提取
四个特征提取子系统独立地从目标环境中提取目标的属性特征和运动特质[10]。
雷达特征提取子系统主要处理目标的雷达回波信号,从而提取目标的速度、加速度、高度、雷达截面积、尺寸、初始发现距离等作为识别目标的特征。
声纳特征提取子系统主要处理目标的声纳回波信号以及目标的辐射噪声,从而提取目标速度、深度、亮点数量、轴频、初始发现距离等作为识别目标的特征。
光电特征提取子系统主要处理目标的红外辐射信号,从而提取目标的辐射亮度、辐射强度、温度、波长等作为识别目标的特征。
电子侦察特征提取子系统主要以被动形接收目标所产生的信号(包括雷达信号、声纳信号和红外信号),从而提取目标信号的频率、脉冲重频、脉宽等作为识别目标的特征。
5.3独立识别
四个独立识别子系统独立地根据目标特征信息输入对目标的类型进行识别。这里的识别方法有模糊推理、BP神经网络等。但是这些方法都需要大量样本来构造识别系统或者对识别系统进行训练。
由于根据目标的多种特征来识别,所以各独立子系统的识别结果不是一个确定的识别结果,而是目标识别框上的模糊集,而目标识别框是根据各子系统输入特征所形成的子目标。如舰载雷达子系统提取目标的速度为20节、雷达反射截面积为2000m2,目标识别框为(1航母,2驱逐舰,3护卫舰,4水面快艇,5商船),则经过独立识别中的算法对速度和雷达反射截面积目标特征处理后,识别结果可能是(0.05,0.15,0.3,0.3,0.2)。
5.4决策融合
各独立识别子系统的结果送往融合中心后,融合中心依据决策级融合算法对识别结果进行融合,利用最大隶属度原则确定最终的识别结果。
6 结语
本文在研究水面舰艇多传感器和水面舰艇目标分类的基础上,提出了一种水面舰艇目标识别模型,并对模型中的预处理、特征提取、独立识别和决策融合四个组成部分的功能进行了分析研究,对完善水面舰艇目标识别系统具有一定的参考价值。
[1]刘高峰,李敏勇.舰载多传感器数据融合系统的层次设计[J].海军工程学院学报,1999,89(4):43-47.
[2]陈科文,张祖平,龙军.多源信息融合关键问题、研究进展与新动向[J].计算机科学,2013,40(8):6-11.
[3]黄漫国,樊尚春,郑德智,等.多传感器数据融合技术研究进展[J].传感器与微系统,2010,29(3):5-8.
[4]曲晓慧,安钢.数据融合方法综述及展望[J].舰船电子工程,2003,134(2):2-4.
[5]李弼程,黄洁,高世海,等.信息融合技术及其应用[M].北京:国防工业出版社,2010.
[6]刘同明,夏祖勋,解洪成.数据融合技术及其应用[M].北京:国防工业出版社,1998.
[7]陆振波,章新华,胡洪波.水下目标辐射噪声的听觉特征提取[J].系统工程与电子技术,2004,26(12):1081-1083.
[8]曹立华,李宁,杨词银,等.3~5um红外探测器的辐射定标[J].红外与激光工程,2012,41(4):858-864.
[9]黄涛,夏佩伦.潜艇多信息源目标融合识别模型[J].武器装备自动化,2004,23(3):648-651.
[10]何友,王国宏,彭应宁,等.多传感器信息融合及应用[M].北京:电子工业出版社,2007.
Procedural Model Analysis of Warship Target Fusion Recognition
LI JunHUANG Liwei
(Dalian Naval Academy,Dalian116018)
How to use sensors equipped on surface ships accurately and timely to identify the targets is the key to victory in naval battle.Based on the study about data fusion,the paper analyzes divisions of sensors on surface ship and target classifications of surface ships,which presents a model of warship target fusion recognition.The sensor subsystems in the model use sensors to obtain information and extract the target character information,and independently identify the target types based on input character information.Finally in the fusion recognition center of model the results from various subsystems are fused to determine the identity of the ultimate goal.
data fusion,target recognition,character information
2016年3月10日,
2016年4月23日
李军,男,硕士,研究方向:目标识别,数据融合。
TP391.41DOI:10.3969/j.issn.1672-9730.2016.09.008
猜你喜欢
军事文摘(2023年1期)2023-02-03 05:05:26
考试与评价·八年级版(2020年5期)2020-10-29 05:42:35
装备制造技术(2020年12期)2020-05-22 09:24:54
电子制作(2018年19期)2018-11-14 02:37:08
电子测试(2018年14期)2018-09-26 06:04:12
中国军转民(2018年1期)2018-06-08 05:53:23
兵器知识(2017年10期)2017-10-19 19:34:33
军事运筹与系统工程(2017年1期)2017-07-31 18:19:00
自动化学报(2017年11期)2017-04-04 02:52:58
火控雷达技术(2016年2期)2016-02-06 02:29:03
