一种光刀式义齿三维轮廓测量系统标定方法*
2016-10-24 02:14蔡文泽田爱玲刘丙才王红军
西安工业大学学报 2016年8期
蔡文泽,田爱玲,刘丙才,王红军,陈 桦
(1.西安工业大学 陕西省薄膜技术与光学检测重点实验室,西安 710021;2.西安工业大学 机电工程学院,西安 710021)
一种光刀式义齿三维轮廓测量系统标定方法*
蔡文泽1,田爱玲1,刘丙才1,王红军1,陈桦2
(1.西安工业大学 陕西省薄膜技术与光学检测重点实验室,西安 710021;2.西安工业大学 机电工程学院,西安 710021)
为了提高数字化口腔测量系统的测量精度,文中基于光刀式测量法,提出了一种用于测量义齿三维轮廓的系统标定方法.采用具有一定斜面的立方体作为标定块,通过标定块的单方向平移,确定出每一个高度下空间物理位置点在摄像机成像平面的像素值,对标定范围内所有像素点进行标定,得到网格式的标定结果.该标定方法经实验验证,结果表明:标定后测量系统的测量精度达到0.04 mm,对高度标定具有连续性;通过标定块的两次平移可以完成整个标定过程;较传统义齿三维轮廓测量系统标定方法,标定灵活性增强,标定原理简化,标定速度快.
三维轮廓测量;系统标定;义齿;标定速度
数字化口腔修复技术是一种完全建立在数字信息科学上的现代化技术,它利用数字化测量设备获取牙齿的三维信息,再通过计算机准确的设计出牙齿修复体,将数据传入数控加工机器进行义齿的加工制作[1-3].与传统的手工制作工艺方法比较,该方法提高了测量、加工与制作的效率,缩短了患者就诊的时间.目前国外在这方面的研究比较成熟,已经有大量产品投入市场,例如丹麦3shape公司研发的牙科三维扫描仪,利用线结构光测量法,测量精度范围达到0.03~0.10 mm;德国Sirona公司的Blue AC型扫描仪,可以实现口内直接测量,精度达到0.04~0.06 mm.国内由于起步较晚,相关技术还停留在研究阶段.对于三维轮廓测量来说,标定的精度直接影响测量的结果,文中针对线结构光测量系统,对其标定技术进行研究.目前,关于线结构光测量系统的标定方法有很多[4-5].文献[6]提出机械调整法,该方法将光刀与摄像机调节到一个特定位置,利用理想透视模型求得实际物理坐标与成像坐标之间的位置关系,但该方法由于人为调节环节多,并且将摄像机模型简化为理想模型,因此标定过程复杂,标定精度不高;文献[7]提出基于拉丝法的标定方法,该方法利用激光线与铁丝相交形成的点作为特征点,实现光刀相对于摄像机成像位置的标定,但这类方法在标定之前需要求取摄像机内外参数,因此标定过程较繁琐;文献[8]提出基于主动视觉的标定方法,该方法通过控制线结构光传感器做若干平移运动,完成光刀相对于摄像机成像位置的标定,但这种方法需要利用传感器在不同方向做多次平移运动,标定过程仍然较为复杂.以上标定方法均存在标定过程繁琐、标定时间长的问题,本文提出了一种新的线结构光测量系统的标定方法,只需利用具有一定斜面的标定块,通过单方向的平移运动,便可完成光刀相对于摄像机成像位置的标定.该方法标定过程快速便捷,操作简易方便,能够实现现场标定.
1 义齿三维轮廓测量系统的标定
义齿三维轮廓测量的原理主要应用激光三角法[9-11].在测量过程中,激光器投射线结构光到被测物体表面受被测物体表面曲率特征分布的调制,双电荷耦合元件(Charge-Coupled Device,CCD)摄像机拍摄的光刀成像的位置会发生改变.激光三角法测量原理如图1所示,d为接收透镜与像面之间的距离即相距,l为入射光点到接收透镜光心的距离即物距,θ为激光束光轴与摄像机光轴之间的夹角,Δh为光刀中心在CCD摄像机成像平面的位置变化,ΔH为被测物体表面起伏.
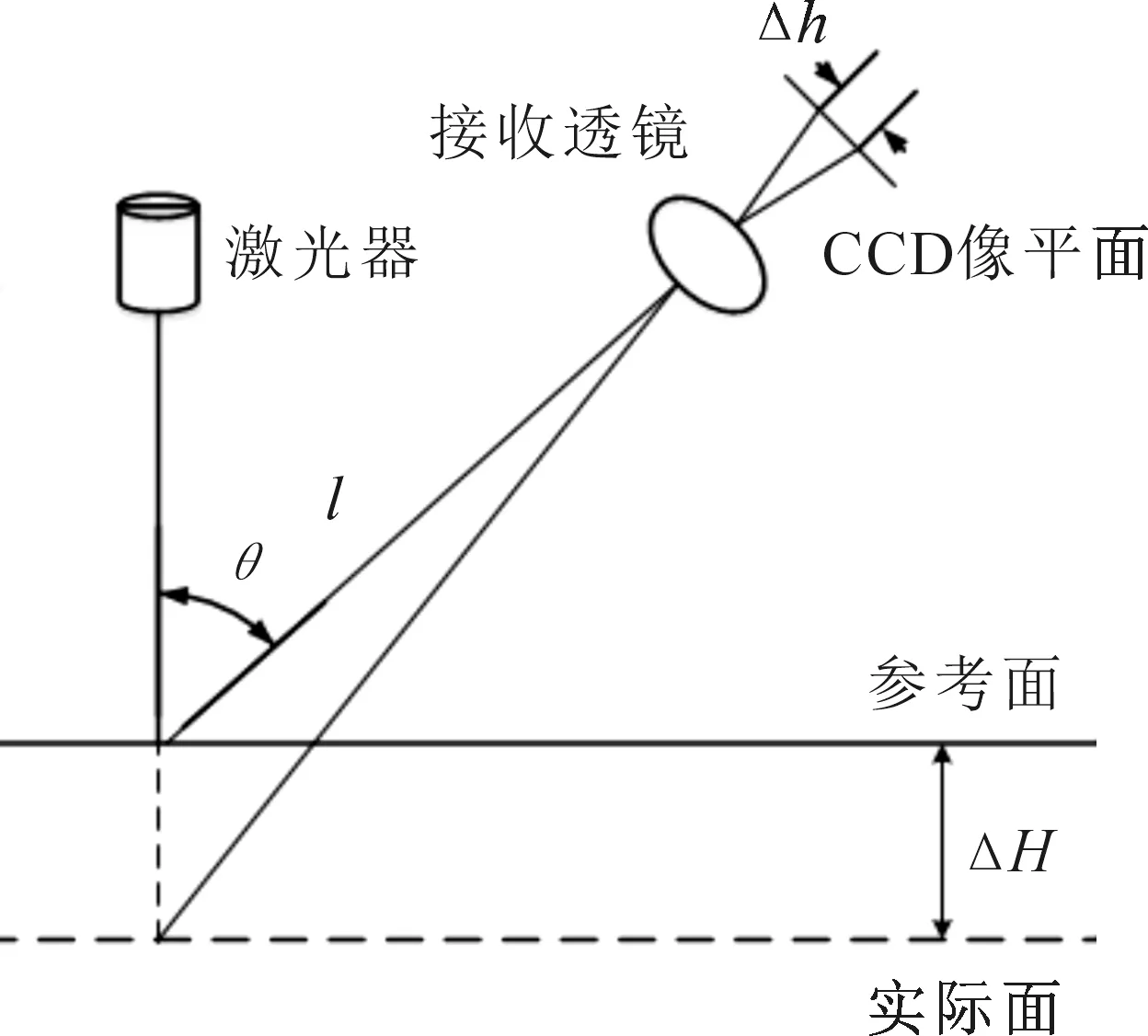
图1 激光三角法测量原理
通过三角几何关系,可得
(1)
其中f为透镜焦距.在系统固定的情况下,参数l,f,θ和d都是固定的,在测量过程中,只需求出成像平面的位移Δh,便可确定物体表面起伏ΔH.因此,需要通过标定来确定实际物理坐标与成像坐标之间的位置关系.
标定所采用标定块结构如图2所示,该模块标定表面与水平面成30°夹角,标定平面上一系列间隔1mm的刻度.

图2 标定块
在测量过程中,线结构光投射在被测物体表面,通过光刀测量物体z轴方向的高度变化,以及y轴方向的物体宽度尺寸,因此光刀平面的标定分为z轴和y轴两个方向标定,得到(y,z)二维平面的标定结果.标定过程如下:① 向标定平面投射光刀;② 标定块做平移运动,采集图片;③ 设定阈值,提取光刀中心线像素坐标值;④ 完成光刀平面z轴方向的标定;⑤ 采集标定平面刻度线图片;⑥ 将z轴方向光刀中心线像素坐标与刻度线叠加;⑦ 提取叠加交点处像素坐标;⑧ 完成光刀平面y轴方向的标定.
激光器沿z轴方向对标定平面垂直投射线结构光,由于标定平面为一斜面,因此标定块做x轴方向平移运动时,标定平面的线结构光会产生z轴方向的高度调制,通过提取不同高度激光线在成像平面的成像坐标,建立光刀各高度物理坐标与成像位置之间的关系,完成光刀相对于摄像机的z轴方向的标定.
标定平面激光线成像图如图3(a)所示,z轴方向光刀中心像素值的提取过程主要利用阈值法以
及重心法,通过对图像灰度值设定一个阈值,将采集图像中低于阈值部分的灰度值取为0,保留高灰度值部分,再通过逐点搜索对高灰度值部分灰度坐标进行提取.
由于光刀光强从中心处向两边逐渐衰减,因此光刀在成像平面的成像灰度值呈正态分布,如图3(b)所示,光刀中心处光强最强,其灰度值也为最大值,假设成像平面u轴像素坐标为Un(n=0,1,2,…,1 024),所对应灰度值为Gn(n=0,1,2,…,1 024),此时需要利用重心法提取峰值处成像坐标,激光中心线最大灰度值对应的像素值Gu为
(2)

图3 z轴方向标定成像示意图
光刀平面y轴方向标定原理如图4所示,通过z轴光刀中心成像坐标与标定平面刻度的叠加,提取各高度成像平面交点处像素值,完成光刀相对于摄像机y轴方向的标定.

图4 y轴方向标定成像示意图
2 实验及分析
系统标定的图像采集过程是基于线结构光义齿测量系统完成的,激光器发出的光线为线结构光,通过左右CCD摄像机进行拍摄,摄像机采集图像的分辨率为1 280pixel×1 024pixel.实验中,标定块水平固定在电动平移台上,随电动平移台水平移动9mm,采集10个高度下光刀成像图以及标定平面刻度线成像图.在图像采集的过程中,由于采集的光刀图受噪声影响,因此,在对标定点像素坐标提取之前,需要对其进行中值滤波处理,处理结果如图5所示.图5表示中值滤波前后某一高度光刀中心坐标在成像平面的像素值.横坐标为成像平面v轴像素值,纵坐标为成像平面v轴像素值.滤波之前由于噪声影响,光刀中心坐标提取结果并不理想,通过中值滤波可以对光刀中心坐标进行平滑处理.
对采集图像进行滤波之后,便可以对标定坐标进行提取,提取结果如图6所示,图6(a)为光刀z轴方向标定结果,横坐标为光刀标定表面的高度值,纵坐标为光刀中心像素值;图6(b)为光刀y轴方向标定结果,横坐标为标定表面的刻度值,纵坐标为光刀中心与刻度交点的像素值.由图6可以看出,标定结果基本呈线性分布,同时,在标定过程中,光刀成像坐标与对应的实际物理位置坐标通过点对点方式进行标定,在之后的轮廓测量中利用标定结果对每一点进行还原,因此该标定方法能够很好的避免相机畸变对测量结果的影响.
通过具有一定高度差的阶梯状模块对标定后的测量系统的测量精度进行验证,阶梯状模块高度差为4.78mm,测量结果见表1.由表1可以看出,测量值与实际高度有一定的偏差,通过重复测量验证得出,测量系统通过标定后对物体测量的误差在0.04mm之内.

图5 中值滤波示意图

图6 标定结果示意图

实际高度差/mm测量高度差/mm测量一测量二测量三测量四测量五测量六测量七测量精度/mm4.784.744.814.754.744.824.814.740.04
3 结 论
1) 本文提出了一种用于测量义齿三维轮廓的线结构光系统标定技术,该标定技术采用具有一定斜面的立方体作为标定块,通过标定块的单方向平移,便可得到每一个高度下空间物理位置点在摄像机成像平面的像素值,从而完成对标定范围内所有像素点的标定.
2) 与传统标定方法相比较,该方法解决了其不连续、标定过程繁琐等问题,提高了标定速度,实现了现场标定.改进后标定方法的标定过程具有连续性,且改进之后标定过程可按照需要对测量范围之内的任意一点进行标定.实验结果表明,该方法标定过程操作简易方便,标定精度达到0.04 mm.
[1]崔海华.微小型数字化口腔测量关键技术研究及应用[D].南京:南京航空航天大学,2012.
CUI Haihua.Key Technologies Research and Application of Micro Digital Dental 3D Scanning System[D].Nanjing: Nanjing University of Aeronautics and Astronautics,2012.(in Chinese)
[2]韩科,吕培军.计算机图象图形技术在口腔医学领域中的应用[J].中国图像图形学报,1996,1(2):159.
HAN Ke,LYU Peijun.The Application of Computer Imaging in Dentistry[J].China Journal of Image and Graphics,1996,1(2):159.(in Chinese)
[3]TINSCHERT J,NATT G,HASSENPFLUG S,et al.Status of Current CAD/CAM Technology in Dental Medicine[J].International Journal of Computerized Dentistry,2004,7(1):25.
[4]CURLESS B,LEVOY M.Better Optical Triangulation Through Spacetime Analysis[C]//Fifth International Conference on Computer Vision Proceedings.Washington:IEEE Computer Society,1995:987.
[5]马少平,田爱玲,王红军,等.点阵列标定模板图像特征点提取方法[J].应用光学,2010,31(6):950.
MA Shaoping,TIAN Ailing,WANG Hongjun,et al.Feature Point Extraction of Spot Array Calibration Target[J].Journal of Applied Optics,2010,31(6):950.(in Chinese)
[6]邹定海.三维视觉检测系统研究及其ADC应用[D].天津:天津大学精密仪器系,1992.
ZOU Dinghai.The 3-D Visual Inspection System Research and Applications in the ADC[D].Tianjing:Tianjin University Precision Instrument Department,1992.(in Chinese)
[7]崔希民,李聪,袁德宝,等.基于拉丝法的线结构光视觉测量系统标定[J].科技导报,2014,32(24):64.
CUI Ximin,LI Cong,YUAN Debao,et al.Calibration of a Line Structured Light Vision Measuring System Based on the Drawing Method[J].Science and Technology Review,2014,32(24):64.(in Chinese)
[8]陈天飞,马孜,吴翔.基于主动视觉标定线结构光传感器中的光平面[J].光学精密工程,2012,20(2):256.
CHEN Tianfei,MA Zi,WU Xiang.Calibration of Light Plane in Line Structured Light Sensor Based on Active Vision[J].Optics and Precision Engineering,2012,20(2):256.(in Chinese)
[9]陈天飞,赵吉宾,吴翔.基于共面靶标的线结构光传感器标定新方法[J].光学学报,2015,35(1):172.
CHEN Tianfei,ZHAO Jibin,WU Xiang.New Calibration Method for Line Structured Light Sensor Based on Planar Target[J].Acta Optica Sinica,2015,35(1):172.(in Chinese)
[10]王军,鲍海明,魏仲慧,等.光学形貌测量技术综述[J].光电子技术与信息,2004,17(6):12.
WANG Jun,BAO Haiming,WEI Zhonghui,et al.Review for the 3D Information Measuring Technology[J].Optoelectronic Technology & Information,2004,17(6):12.(in Chinese)
[11]田爱玲,刘洋,郭迎福,等.双CCD光栅投影法测量物体三维轮廓技术[J].西安工业大学学报,2009,29(2):108.
TIAN Ailing,LIU Yang,GUO Yingfu,et al.Technology of Double CCD 3D Profile Measurement Using Grating Project[J].Journal of Xi’an Technological University,2009,29(2):108.(in Chinese)
(责任编辑、校对潘秋岑)
Calibration Method for 3D Profile of Denture Based on Light Sectioning Measurement
CAIWenze1,TIANAiling1,LIUBingcai1,WANGHongjun1,CHENHua2
(1.Shaanxi Province Key Laboratory of Thin Film Technology and Optical Test,Xi’an Technological University,Xi’an 710021,China;2.School of Mechatronic Engineering,Xi’an Technological University,Xi’an 710021,China)
In order to improve the measurement accuracy,a light sectioning measurement based calibration method of the 3D profile of denture is proposed.A cube with certain slope is used as the calibration block,which is unidirectionaly translated to get the pixel value in the camera image plane for every point of each height in space,and obtain grid-style calibration parameters.The test results prove the measurement.The accuracy of measurement reaches 0.04 mm and the continuity of height calibration is achieved.All the information of the calibration can be obtained through twice unidirectional translation of the block.It is more flexible than the ordinary methods and has a good performance of speed and accuracy.
three-dimensional contour measurement;system calibration;denture;calibration speed
10.16185/j.jxatu.edu.cn.2016.08.003
2015-10-14
陕西省科技统筹创新工程计划项目(2010JC09);国家国际科技合作专项项目(2015DFA10360);
蔡文泽(1990-),男,西安工业大学硕士研究生
田爱玲(1964-),女,西安工业大学教授,主要研究方向为现代光学制造与检测技术.E-mail: 414369869@qq.com.
�
A
1673-9965(2016)08-0618-05
陕西省科技厅国际合作项目(2014KW05)
猜你喜欢
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
中国惯性技术学报(2017年1期)2017-06-09
中国公共安全(2017年11期)2017-02-06
电子制作(2017年23期)2017-02-02
中华老年口腔医学杂志(2016年3期)2017-01-15
办公自动化(2016年18期)2016-12-17
中国继续医学教育(2015年5期)2016-01-07
中国医疗美容(2015年2期)2015-07-19