
基于电子地图的港口舰船目标变化检测
2016-10-22 09:36:40孙艳丽周伟王杰
海军航空大学学报 2016年3期
孙艳丽,周伟,王杰
(海军航空工程学院a.基础实验部;b.信息融合研究所,山东烟台264001)
基于电子地图的港口舰船目标变化检测
孙艳丽a,周伟b,王杰a
(海军航空工程学院a.基础实验部;b.信息融合研究所,山东烟台264001)
文章利用电子地图进行配准、提取海岸轮廓线并对其等间距采样,从中提取关键拐角点,并根据条件确定潜在的舰船停靠区域对其规则化。再将不同时相候选区的分割结果进行差分运算,然后将其沿水平垂直方向投影,找到超过平均投影能量的最大区间,判定舰船变化区间。该算法可以避免大范围的无用搜索,提高检测识别算法的效率。
电子地图;舰船目标;变化检测;投影能量
通常对于港口舰船目标的变化检测主要依靠人工判读完成的,由于港口范围较大,而目标相对分散,且地理位置和主要舰船驻泊区在较长时间内均比较固定,因此,实际只需对特定区域进行对比分析[1-4]。在遥感图像的变化检测中,光照、传感器、配准、噪声等因素导致检测结果的虚警率很高[5-9]。而电子地图主要用以表征静止地物的地理位置,舰船、车辆等移动目标均不出现在地图上[10]。这就使得基于电子地图的海陆分割和海岸轮廓的提取非常简单易行,而且精度很高[11]。
本文利用电子地图对不同时相遥感图像舰船候选区进行检测提取,对后续的变化检测工作效率和处理效果均会有明显改善。而且对于不同时相遥感图像的数量和类型均不加限定,具有较强的实用性和通用性。其基本思路是充分利用电子地图,快速提取舰船可能的停靠区域,并将其规则化,将较大范围内复杂多样的检测问题分解为若干小范围内相对简单的检测问题,只需设定合理的规则,即可实现自动的变化分析。可大量减少不必要的搜索,提高工作效率。
1 数据预处理
图1给出了来自Google某地区的电子地图,海域以浅蓝色表示,而陆地则以淡黄色表示,不同级别的道路、建筑物均标示为相应的颜色,地标文字则用黑色。首先,从电子地图上提取码头、海岸的若干明显的拐角点录入控制点库,对于不同时相的遥感图像,只需分别找到图像的相应点;然后,选择合适的校正模型即可实现遥感图像的精确地理校正。

图1 某区域的电子地图Fig.1 Electronic map of some area
2 基于电子地图的舰船候选区提取
由于舰船一般是细长型结构,通常顺次舷靠于码头,而港口码头最常见的形式是顺岸码头。舰船与码头通常具有很强的空间语境约束关系。如果沿海岸轮廓单向前进,则舰船总是停靠在前进方向相同一侧。另外,适合于舰船停靠的码头应有一定的长度。因此,首先从电子地图上提取海岸轮廓线;然后,对其等间距采样,从中提取关键拐角点,确定潜在的舰船停靠区域。具体流程如图2所示。

图2 利用电子地图提取舰船候选区算法流程图Fig.2 Algorithm flow chart of extraction ship candidate using electronic map
2.1海岸线轮廓提取
电子地图上海域和陆地是用不同颜色来表示的,因而港口区域海域和陆地的分割相对比较简单,得到完整的海域。本文所用电子地图来自Google地图。对于海域文字标记,可以对提取的连通海域内部进行形态学填充。提取到完整的海域后,电子地图成为一个二值图,对这个二值图进行边缘检测,采用经典的Canny算子就可以取得很好的效果[6]。图1中,红色线即为提取的海岸线。
2.2海岸线拐点提取
首先,找到海岸线的一个端点,沿逆时针方向进行一次遍历,得到一个长度为n的序列,如果得到多个序列,则取最长的一个。
为了减轻后续拐点分析的负担,可以对这个序列进行等间隔插值采样,得到长度为k的新序列。利用式(1)计算新序列各点的方向:

式中,T(t)为逻辑运算,当t为真时,输出为1。

通常认为两点的方向差异超过Δθ,即认为局部方向发生了较大变化。
对于图1所示的图像,取Δθ=π/18,提取到97个拐点,见图3“*”标志。
2.3舰船候选区提取
因舰船都具有一定的长度,显然,并非所有2个拐点之间都适合舰船停靠。由此,可以根据电子地图的比例尺或分辨率结合中小型水面舰船的尺寸设定合适的像素距离阈值d,依次计算相邻2个拐点之间的距离,若超过阈值,则为可能的舰船停靠海岸段。图1的电子地图,其分辨率为0.6 m,设定最小舰船停靠区间长度为60 m,即像素距离阈值为100,提取到26个可能的舰船停靠海岸段,结果如图3中蓝色直线段所示。

图3 海岸线拐点提取结果Fig.3 Inflection point extraction results
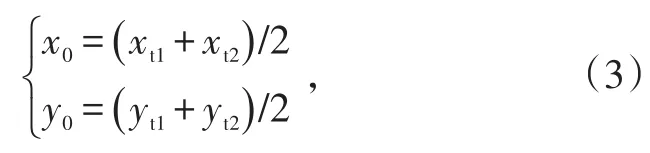
其方向可记为θ,长度即为两拐点Pt1和Pt2间的距离,记为d,显然,中点P(x0,y0)到Pt1和Pt2相等,记为d0,则海域始终在的左侧。将分别沿θ+π/2方向移动d2,得到的区域即为海岸线靠海一侧的舰船驻泊区,沿π/2-θ方向移动d1,得到的区域即为海岸线靠陆地一侧的狭长区域。2个区间共同构成该海岸段的舰船候选区,然后将该区域顺时针方向旋转θ进行规则化。这样舰船候选区间都被规则化成高度为d1+d2宽度为d的矩形区域。其原理见图4。
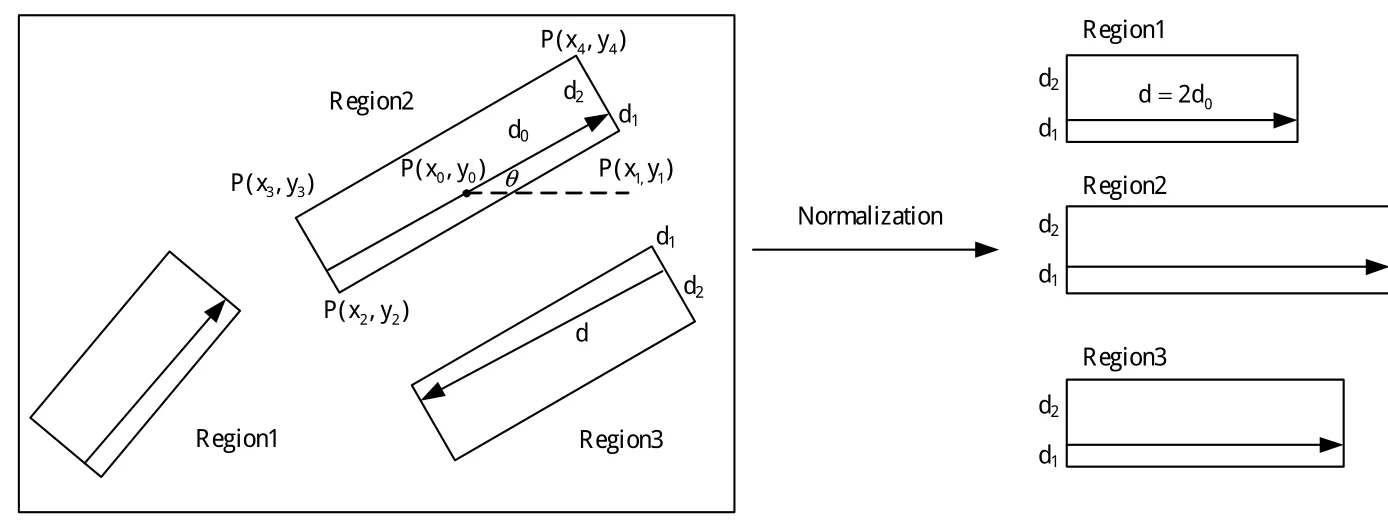
图4 舰船候选区提取及规则化示意图Fig.4 Schematic diagram of ship candidate region extraction and regularization
对已经和电子地图进行配准的不同时相的遥感图像,可分别沿海岸线顺次提取由4个顶点P(x1,y1)、P(x2,y2)、P(x3,y3)和P(x4,y4)所确定的各个ROI区域,4个顶点可用下面的一组公式计算得到:
为进一步简化实际应用中舰船候选区的提取,可以事先计算好4个顶点的地理坐标,和该候选区的方向,存储在数据库中,对不同时相的遥感影像,首先进行地理精校正,然后根据4个顶点的地理坐标提取相应的图像区域,再利用存储的候选区方向信息对提取的图像区域进行规则化即可。
选取与图1相同范围的2幅不同时相的高分辨率遥感图像,利用上述方法,提取了26个舰船候选区,其中d1与d1分别取30和60像素,结果如图5所示。
图6给出了第9、12、22、25号候选区经规则化后的结果。
图5 在不同时相遥感图像上标示的26个舰船候选区Fig.5 In the different time phase of remote sensing image are labeled on the 26 ship candidate
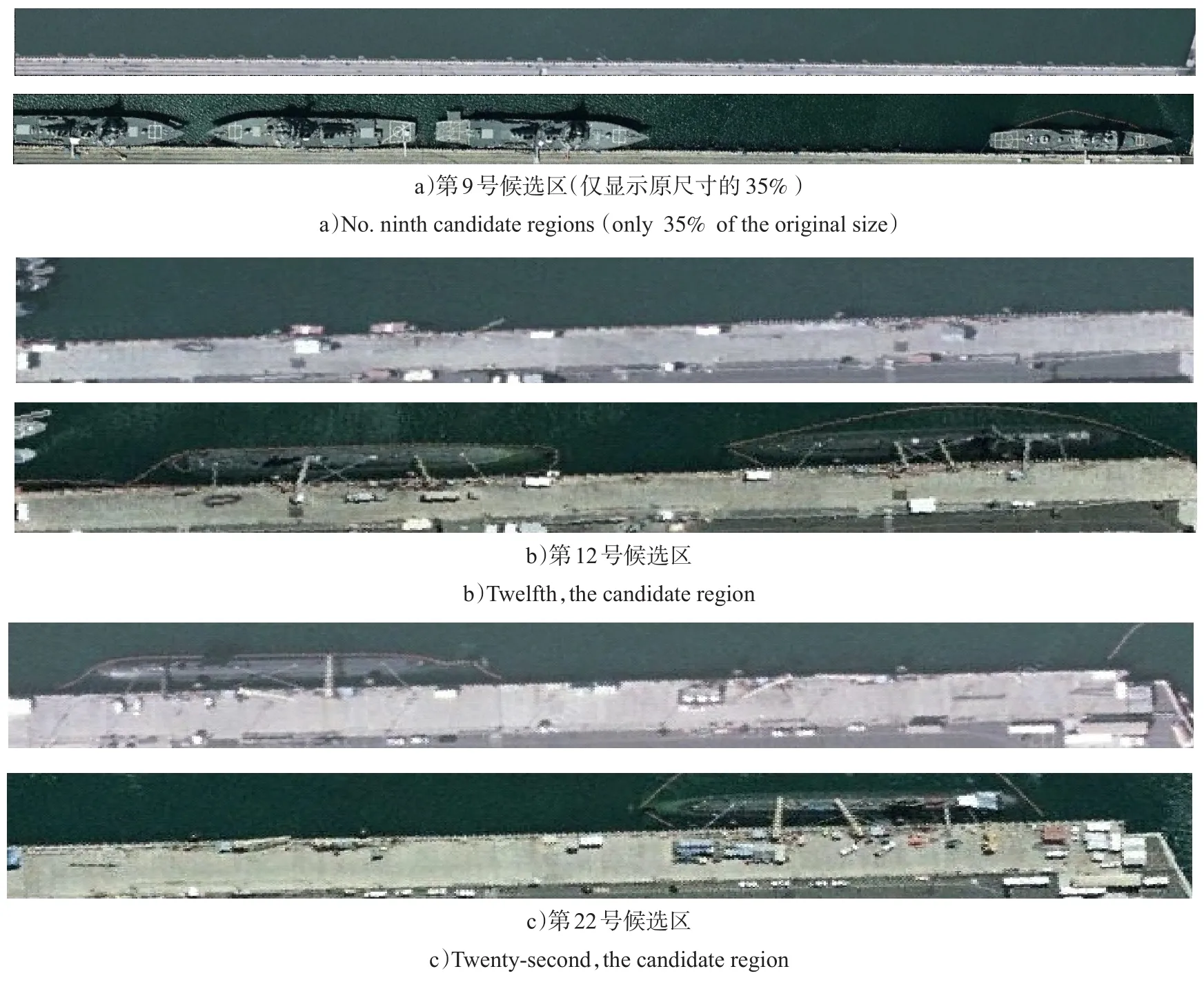

图6 不同时相遥感图像上典型候选区经规则化后的结果Fig.6 Different remote sensing images of typical candidate region by rule after the results
3 舰船候选区变化检测
由于不同时相的遥感图像之间,局部灰度差异较大,直接比较的方法很难有效提取变化的目标[12-13]。在局部舰船候选区主要有3类目标:陆地、舰船和海水,三者尽管在光谱上存在较大差异,但局部也存在严重的混叠现象[14]。为此,首先对不同时相的候选区域分别进行自适应分割,提取ROI区域,经形态学处理得到完整的陆地区域和舰船目标[15];然后,对分割结果进行比较,得到变化信息,并结合舰船尺寸和其他信息进行综合分析,给出最终的目标变化结果。
3.1陆地区域及舰船目标分割
由于陆地区域在不同时相图像中相对稳定,经过差分运算可以很好的消除[16],因而在进行变化分析之前,首先对不同时相的候选区图像进行自适应阈值分割并利用形态学处理提取潜在舰船目标和尽可能完整的陆地区域。
尽管通常情况下陆地、舰船的亮度比海水要高,可以将彩色图像变为灰度图像然后进行阈值分割,但是对于潜艇,由于其与海水灰度接近,分割效果并不理想。为此,首先将图像由RGB空间变换到HSV空间,3个分量分别记为IH、IS和IV,则用式(5)对3个分量进行融合可以使目标得到明显增强。

图7给出了对某一候选区不同时相图像的融合增强结果和各通道平均得到的灰度图像。与灰度图像相比,陆地区域和舰船目标均得到了明显增强,应用全局阈值受背景影响比较大,设计了一个简便易行的自适应阈值设置方法。
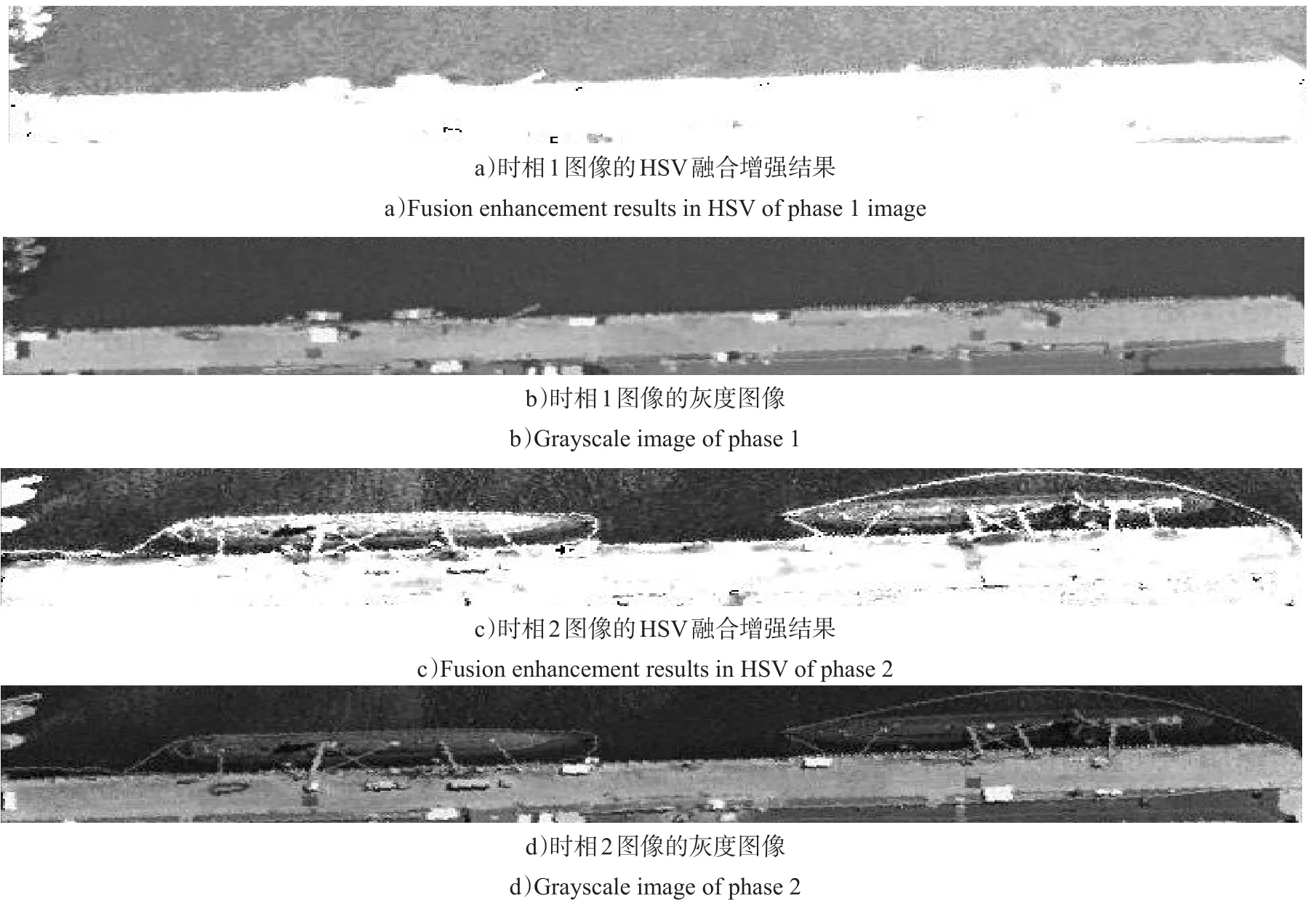
图7 某一候选区不同时相图像的增强结果与灰度图像比较Fig.7 Results compared with gray and enhancement in same candidate regions at different image
设T(i,j)为增强后的图像在(i,j)处的像素,其中1≤i≤M,1≤j≤N,分别计算各行各列的均值μi和μj以及整幅图像的均值μ。
在(i,j)处的阈值T(i,j)取μi、μj和μ的中值,即

利用上述阈值对图像进行分割,得到初步的ROI区域,接下来,综合考虑舰船目标尺寸和位置的约束,目标对应于面积较大的连通区域。因此,利用形态学方法设置面积阈值可有效剔除孤立的无关点和碎小的区域,同时对大块区域进行内部孔洞的填充,最终得到较为完整的陆地区域及舰船目标。对图7中候选区2个时相的图像经融合增强后再进行自适应分割和后处理得到的结果如图8所示。
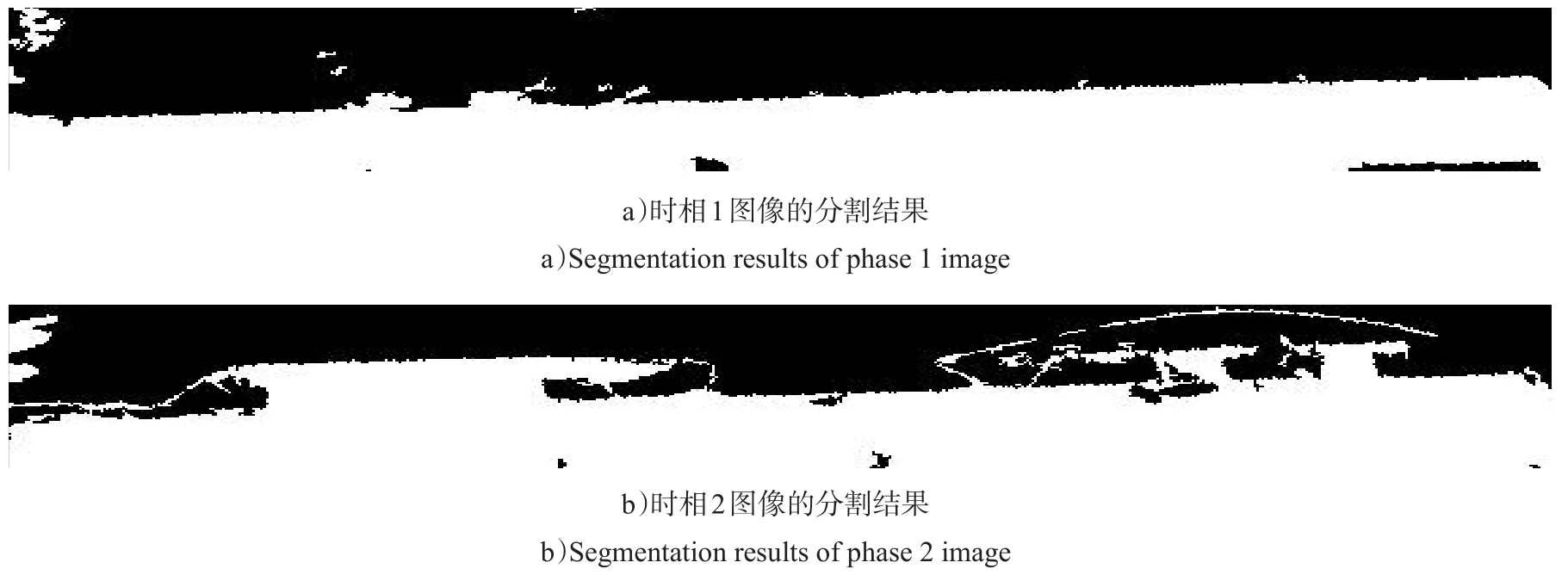
图8 第12号候选区不同时相图像分割结果Fig.8 Segmentation results of twelfth candidate regions at different image
3.2变化分析
不同时相图像的变化分析是在目标分割的基础上分层进行的,其流程如图9所示。将分割结果进行差分,计算变化区域的总面积,若小于特定阈值,则可以从整体上判定该区域没有明显变化,否则进一步确定变化区域位置;如果变化区域的主体部分在海岸线陆地一侧,则判定无舰船变化,否则进一步根据舰船的尺寸、长宽比等几何特征对舰船目标加以确认,进而判定目标消失或出现。
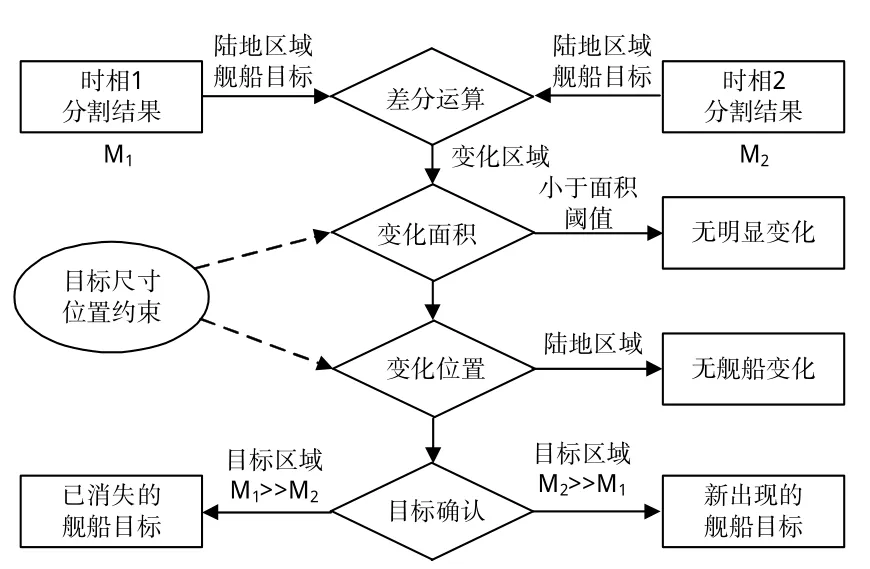
图9 变化分析的操作流程Fig.9 Flow chart of change detection
总体变化面积阈值的设定,通常取决于图像的分辨率和舰船的尺寸,这一步的主要目的是快速剔除没有明显目标变化的场景。
对变化区域位置的确定,通过将差分图像分别向沿水平方向和垂直方向投影来实现。由于变化分析的图像均已经进行了规则化,舰艇艏艉轴线以及海岸线均大体在水平方向上,因而将差分结果沿水平方向投影,可得到变化舰船两舷的精确位置。进一步沿垂直方向投影,可得到变化舰船艏艉两端的精确位置。
仍以第12号候选区为例,将不同时相图像的分割结果进行差分运算,得到结果如图10 a)所示,然后将其沿水平方向投影,找到超过平均投影能量的最大区间,若其宽度超过设定门限(通常对应于舰船宽度),即初步判定为可能的舰船变化区间,但是如果该区间大部分位于海岸线参考位置右侧,则认为该区间的变化不是来自于舰船目标。见图10 b),在海岸线参考位置左侧[23,55]之间存在一个能量投影较大的区间,接下来对可能的舰船变化区间沿垂直方向投影,结果如图10 c)所示,从中可以找到4个能量投影较大的区间,其中,最左侧区间宽度较小,可加以排除,另外3个区间A:[87,240]、B:[414,453]和C:[482,507]中A可直接确认为舰船目标,而B与C之间的间距与其各自的宽度接近,无法直接判定为舰船目标,可以将该区域标示为可能的舰船目标变化区,需要回到图像上利用其他特征加以识别。
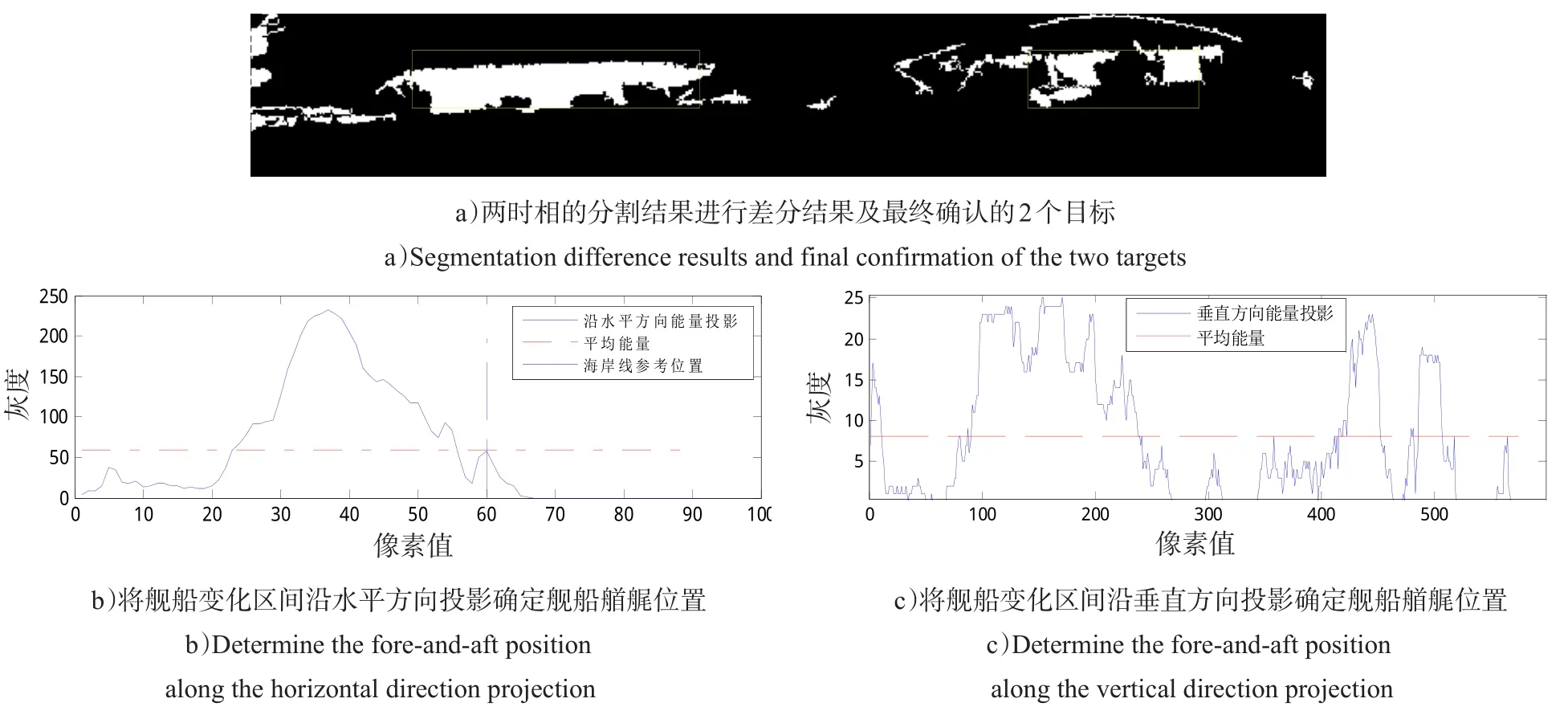
图10 舰船目标变化分析示例Fig.10 Example of ship targets change analysis
找到目标变化区以后,根据该区域在不同时相图像上平均能量的大小,可区分出2种情况,考察不同时相的分割图像,对于同一目标变化区,若时相1的能量小于时相2,则判定舰船出现,否则,判定舰船消失。
至此,可以利用上述方法对各个舰船候选区进行变化分析,得到整个港口的最终的变化检测结果。限于篇幅,图11仅给出第9、22和25舰船候选区的变化分析结果。结果标注在时相2的图像上,其中“------”标示新出现的舰船目标,“——”标示消失的舰船目标。
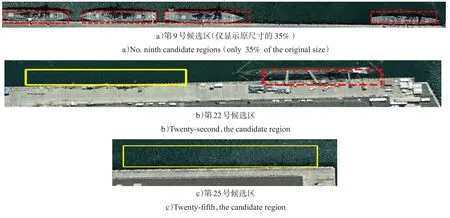
图11 部分舰船候选区变化分析结果Fig.11 Part ship candidate change analysis results
4 结论
本文探讨的基于地图的变化检测方法,基本出发点是利用电子地图信息快速准确地找到舰船候选区,并对其规则化,使目标提取和变化分析在标准的操作环境下进行,可基本实现计算机自动处理,具有较强的推广应用潜力。对于单幅图像的港口舰船检测与识别,也可以首先将其与电子地图配准,然后提取规则化的舰船候选区域切片,这样可以避免大范围的无用搜索,显著降低运算量,提高检测识别算法的效率。
[1]蔡姝,吴宏明.基于海陆分割的舰船目标变化检测研究[J].电视技术,2010,34(5):109-112. CAI SHU,WU HONGMING.Study on change detection of ship target based on sea-land segmentation[J].Video Application&Project,2010,34(5):109-112.(in Chinese)
[2]随银岭,邹焕新,雷琳.一种基于模板的港口舰船目标变化检测方法[J].计算机工程与科学,2013,35(6):134-141. SUI YINLING,ZOU HUANXIN,LEI LIN.A novel change detection method of harbor ship target based on template[J].Computer Engineering&Science,2013,35(6):134-141.(in Chinese)
[3]万剑华,厉梅,任广波,等.基于变化检测的滨海湿地图高效更新方法[J].国土资源遥感,2013,25(4):85-90. WAN JIANHUA,LI MEI,REN GUANGBO,et al.Efficient method for updating coastal wetland map based on change detection technology[J].Remote Sensing for Land and Resources,2013,25(4):85-90.(in Chinese)
[4]钟家强,王润生.一种基于线特征的道路网变化检测算法[J].遥感学报,2007,11(1):27-32. ZHONG JIAQIANG,WANG RUNSHENG.A road network change detection algorithm based on linear feature[J].Journal of Remote Sensing,2007,11(1):27-32.(in Chinese)
[5]METTERNICHT G.Change detection assessment using fuzzy sets and remotely sensed data:an application of topographic map revision[J].ISPRS Journal of Photogrammetry and Remote Sensing,1999,54(4):221-233.
[6]李德仁.利用遥感影像进行变化检测[J].武汉大学学报:信息科学版,2003,28(S5):7-11. LI DEREN.Change detection using remote sensing imagery[J].Journol of Wuhan University:Information Science,2003,28(S5):7-11.(in Chinese)
[7]CHEN GANG,HAY G J,CARVALHOLMT,et al.Object based change detection[J].International Journal of Remote Sensing,2012,33(14):4434-4457.
[8]ZHANG QIAN,CAO ZHIGUO,HU ZHONGWEN,et al.Joint image registration and fusion for panchromatic and multispectral images[J].IEEE Geoscience and Remote Sensing Letters,2015,12(3):467-471.
[9]BAZYY,BRUZZONE L,MELGANI F.Image thresholding based on the EM algorithm and the generalized Gaussian distribution[J].Pattern Recognition,2007,40(2):619-634.
[10]佃袁勇,方圣辉,姚崇怀.一种面向地理对象的遥感影像变化检测方法[J].武汉大学学报:信息科学版,2014,39(8):906-912. DIAN YUANYONG,FANG SHENGHUI,YAO CHONGHUAI.The geographic object-based method for change detection with remote sensing imagery[J].Geomatics and Information Science of Wuhan University,2014,39(8):906-912.(in Chinese)
[11]SUN YANLI,ZHOU WEI,LING YUNFENG.Candidate region detection of ship target in port based on electronic map[C]//Frontiers of Manufacturing Science and Measuring Technology IV.2014:1420-1424.
[12]CANNY J.A computational approach to edge detection[J].IEEE Transactions Patten Analysis and Machine Intelligence,1986,8(6):679-698.
[13]彭碧发,谭毅华.从高分辨率遥感图像中自动识别水上桥梁[J].应用科学学报,2010,28(4):354-360. PENG BIFA,TAN YIHUA.Automatic detection of bridge over water in high-resolution remote-sensing image[J]. Journal of Applied Sciences,2010,28(4):354-360.(in Chinese)
[14]MENA J B,MALPICA J A.Color image segmentation using the dempster-shafer theory of evidence for the fusion of texture[C]//The International Archives of the Photogrammetry Remote Sensing&Spatial Information Sciences/w8.2003:139-144.
[15]DURUCAN E,EBRAHIMI T.Change detection and background extraction by linear algebra[J].Proceeding of the IEEE,2001,89(10):1368-1381.
[16]CHARALAMPIDIS D,STEIN G W.Target detection based on multi-resolution fractal analysis[C]//The International Society for Optical Engineering Signal Processing,Sensor Fusion,and Target Recognition XVI.Orlando,2007:1117-1125.
Change Detection of Ship Target in Port Based on Electronic Map
SUN Yanlia,ZHOU Weib,WANG Jiea
(Naval Aeronautical and Astronautical University a.Department of Basic Experiment;b.Research Institute of Information Fusion,Yantai Shandong 264001,China)
In this paper,electronic map information was applied to registration,the coast contours was extracted and sampled equidistant,then the key corner point was extracted from it,potential area of ship docking was identified and regularized.And segmentation of the Candidate region image at different phase was operated differential,then projected along the horizontal and vertical direction,the maximum interval exceeded the average projection energy was found,and the change region of ship was determined.The algorithm might avoid the large range of useless search,and improve the efficiency of detection.
electronic map;ship target;change detection;projection energy
TP391.41
A
1673-1522(2016)03-0372-07DOI:10.7682/j.issn.1673-1522.2016.03.013
2016-03-24;
2016-04-15
孙艳丽(1982-),女,工程师,硕士。
猜你喜欢
猪业科学(2024年1期)2024-02-27 10:14:24
北京航空航天大学学报(2022年8期)2022-08-31 08:58:30
河北地质(2021年1期)2021-07-21 08:16:12
理论探索(2021年6期)2021-05-26 17:06:22
化工设计通讯(2020年4期)2020-05-15 10:15:42
石油地质与工程(2019年4期)2019-09-10 08:22:44
中国生物医学工程学报(2019年5期)2019-07-16 07:56:46
电脑知识与技术(2018年24期)2018-11-26 09:33:32
中南林业科技大学学报(2017年12期)2017-12-19 06:32:55
测绘科学与工程(2017年5期)2017-05-07 06:30:46
