电动公交客车用增程器控制策略试验研究*
2016-10-21 11:41:20严海波楼狄明徐宁张孟超上海汽车集团乘用车有限公司上海0804同济大学汽车学院
小型内燃机与车辆技术 2016年4期
严海波 楼狄明 徐宁 张孟超(-上海汽车集团乘用车有限公司上海0804-同济大学汽车学院)
·研究·开发·
电动公交客车用增程器控制策略试验研究*
严海波1楼狄明2徐宁2张孟超2
(1-上海汽车集团乘用车有限公司上海2018042-同济大学汽车学院)
基于某增程式电动城市公交客车,进行了柴电增程器工作路径及控制策略设计,并通过搭建的专用试验系统,重点进行了增程器控制策略中发动机功率上升和下降速度限值对发动机动力跟随特性、油耗和排放的试验研究。结果表明:当增程器发动机功率下降速度限值较大时,减速减载过程中,会出现较明显的发动机转速超调及震荡。综合考虑制动能回收余量和增程器噪声、振动与声振粗糙度(NVH)性能,最大功率下降速度限值定为较小的-8 kW/s。随着增程器发动机功率上升速度限值的增大,中国典型道路循环(CCBC)下发动机输出的能量增加,可以减少电池的充放电,而循环比油耗基本不变,但循环超细颗粒排放比数量和比质量都会显著增加,循环NOx比排放也有所增加。考虑到增程式电动公交车每日都将出现增程模式,为保证电池寿命,同时避免排放增加太多,选择功率上升速度限值为1 kW/s。
增程器控制策略功率上升速度功率下降速度
引言
增程式电动公交客车有动力电池和增程器两个能量来源,可以在保证续驶里程的前提下,减少动力电池的使用,增程式电动系统向纯电动系统过渡是一种理想的技术路线[1]。
增程式电动公交客车中增程器控制策略的好坏直接影响到整车性能。增程器控制策略主要有两大类[2-4]:一是基于规则的控制策略,二是基于优化的智能算法控制策略。其中智能算法需要处理器具有较强的计算能力,可靠性较差,因而没有得到推广。基于规则的控制策略主要包括开关式和功率跟随两种。开关式控制策略下,增程器起动后发动机恒定地输出功率,排放和燃油消耗较低,但对电池寿命损伤大。功率跟随控制策略根据动力电池的状态及整车需求功率来确定增程器功率输出,增程器输出功率大部分可以直接传给驱动电机减少电池充放电过程,避免能量多级转换,并提高电池的寿命,但由于工作过程发动机不断进行工况切换,发动机的燃油消耗和排放会增加。
面对每日都存在较大比例增程模式的增程城市电动公交用增程器,本文选用了功率跟随控制策略。并重点对功率跟随控制策略中不同功率上升速度和下降速度对油耗和排放的影响进行了试验研究。
1 增程器工作路径及控制策略确定[5]
根据所匹配12 m长公交车整车功率需求,进行了增程器匹配。增程器所匹配发动机为某排量1.9 L的涡轮增压直喷柴油机,额定功率为72 kW。
1.1増程器工作路径确定
图1所示为综合发动机与发电机效率后的増程器的燃油消耗率及初选的功率跟随控制策略下的最佳燃油消耗曲线。

图1增程器燃油效率及最佳燃油消耗曲线
图2、图3所示分别为增程器的NOx比质量排放和超细颗粒比数量排放。通过合理设置增程器工作路径的起点有效地避开了NOx比排放严重区域,而最佳燃油消耗线的终点所处区域颗粒排放较为严重,且增程器工作在终点的时间较长,对整个循环的排放影响较大,所以需要将最佳燃油消耗线往下调整,最终得到增程器工作路径。

图2 NOx排放特性

图3 超细颗粒排放特性
増程器工作路径最大功率输出点选择较佳燃油消耗点,需满足动力性对电功率的需求,同时不能超过电池最大充放电倍率限制,最终确定其对应增程器的发动机功率为46 kW。
1.2増程器控制策略
当电池荷电状态(SOC)低于设定的下限值后,增程器起动后迅速切换到工作路径的起点进行暖机[6]并等待。当动力电池SOC高于设定上限值,增程器回到怠速并怠速一段时间进行冷机后再停机。暖机结束后,増程器发动机输出功率将跟随驱动电机需求功率。当驱动电机需求功率大于46 kW时,增程器发动机输出功率为46 kW,当驱动电机需求功率小于26 kW时,增程器发动机输出功率为26 kW,当驱动电机需求功率介于26 kW~46 kW时,增程器发动机输出功率为跟随驱动电机需求功率。
2 试验设备及方法
基于瞬态测功机搭建了增程器发动机瞬态过程模拟测试台架,通过上位机进行增程器发动机功率输出控制,通过控制发动机电子油门输入来控制增程器转速,对电力测功机施加扭矩指令。利用TSI EEPS 3090进行超细颗粒排放分析,利用Horiba OBS 2000进行气态排放物NOx的分析,测试系统示意图如图4所示。

图4 增程器发动机测试系统示意图
3 试验结果及分析
3.1增程器发动机跟随特性
图5所示为增程器发动机动力跟随情况。从图中可见,发动机实际转速、转矩与仿真的目标基本相同,但是在功率上升和下降过程中均有转速超调现象。图6所示为驱动电机需求功率与増程器发动机实际输出功率对比图。
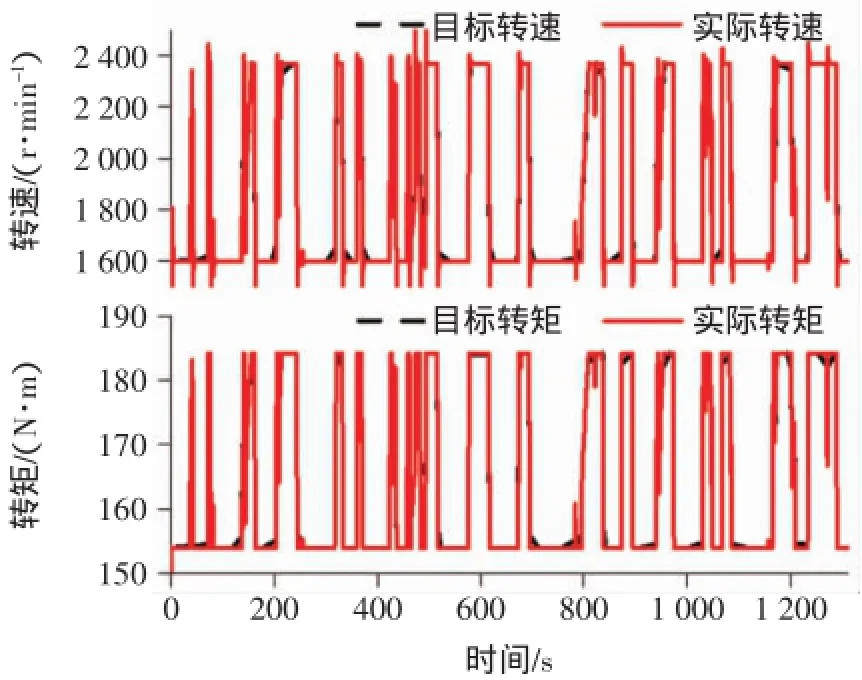
图5 发动机实际动力跟随情况
由图6可见,当驱动电机需求功率介于26 kW与46 kW时,増程器发动机输出功率能很好地跟随整车需求功率。
图7所示为实际工作过程发动机工作点分布。由图可见,发动机工作点有部分远离工作路径。这是因为发动机输出功率迅速提高或者降低过程产生转速超调,将导致发动机排放恶化,油耗增加,因此需对发动机功率变化速度进行限制。重点针对发动机在常用最小功率输出点和最大功率工况点切换过程中的功率变化速度限值对发动机跟随特性、燃油经济性和排放特性进行了研究。
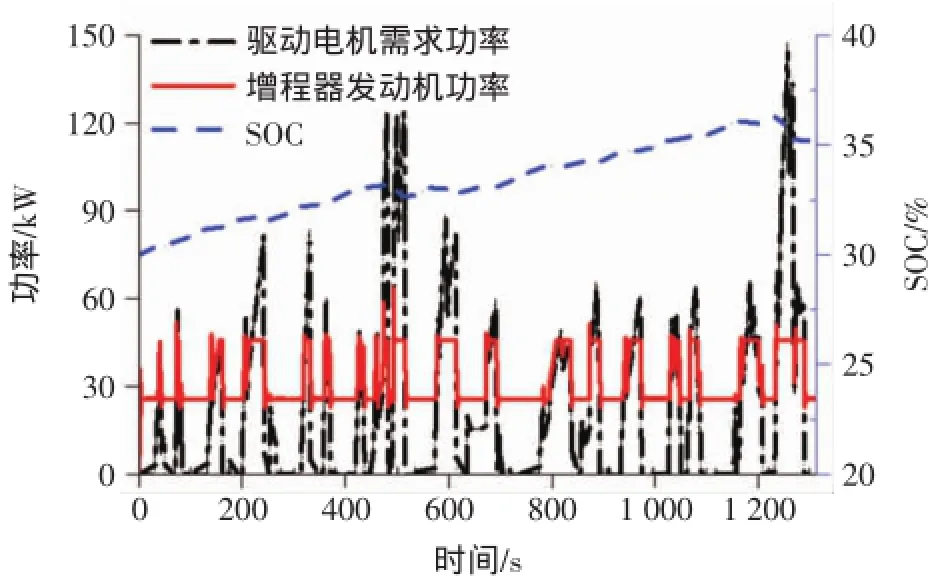
图6 整车驱动电机需求功率与发动机输出功率

图7 实际过程增程器工况点分布
3.2发动机减速减载过程
图8所示为不同功率下降速度限值下发动机动力跟随情况。从图8可见,当功率下降速度为-4 kW/s的时候,发动机的实际转速、转矩及功率都能很好地跟随其对应的目标值,但是功率下降过程需要5 s。当功率下降速度为-6 kW/s时,实际转速有小幅超调,实际转矩对目标转矩的跟随情况较好。当功率下降速度为-8 kW/s时,实际转速有小幅超调,实际转矩对目标转矩的跟随情况一般。当功率下降速度为-10 kW/s时,实际转速有较大幅度的超调,转速震荡也较严重,实际转矩的跟随较差。可见,功率下降速度限值越大,尽管为制动能量回收提供了更大的空间,但是转速超调情况也会越严重,发动机寿命和整车NVH性能将会下降。综合考虑,增程器发动机功率下降速度限值定为-8 kW/s。
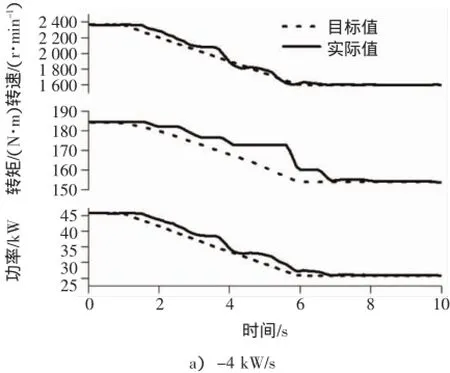
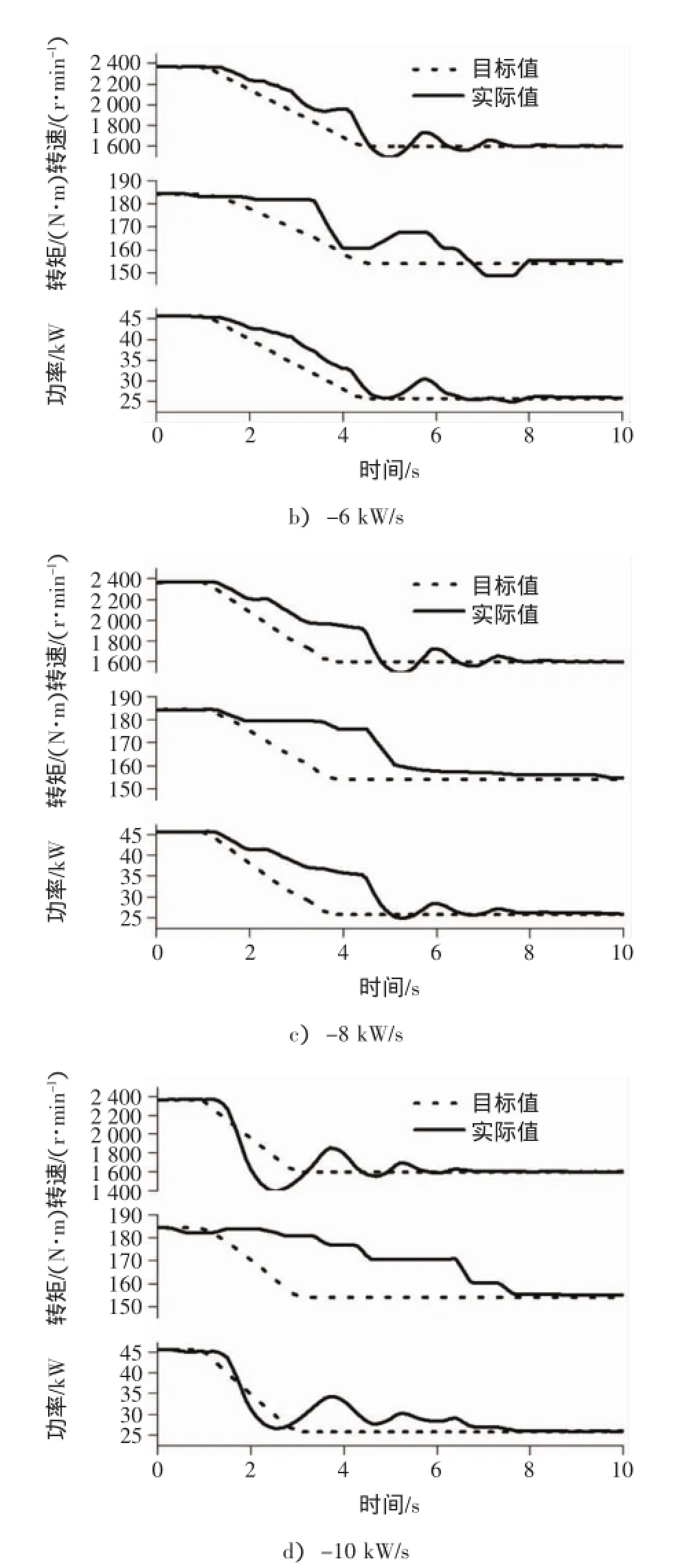
图8 不同功率下降速度限值下发动机动力跟随情况
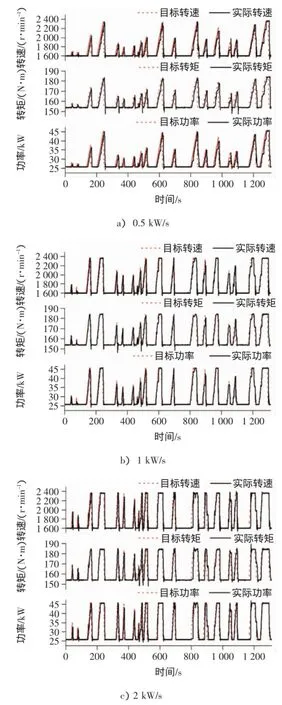
图9 不同功率上升速度限值下发动机动力跟随情况
3.3发动机加速加载试验
以增程器发动机-8 kW/s的最大功率下降速度限值为基础,研究了中国典型道路工况循环(CCBC)下功率上升速度限值对发动机跟随、油耗和排放特性的影响。图9所示为不同功率上升速度限值下发动机的实际状态与目标需求的对比。由图可见,功率上升速度限值为0.5 kW/s,1 kW/s,2 kW/s时,加速加载过程中均没有发生明显的转速、转矩超调和震荡,动力跟随特性都较好。
图10和11所示分别为不同功率上升速度限值下对应的发动机的燃油消耗率及发动机工作点的时间分布。
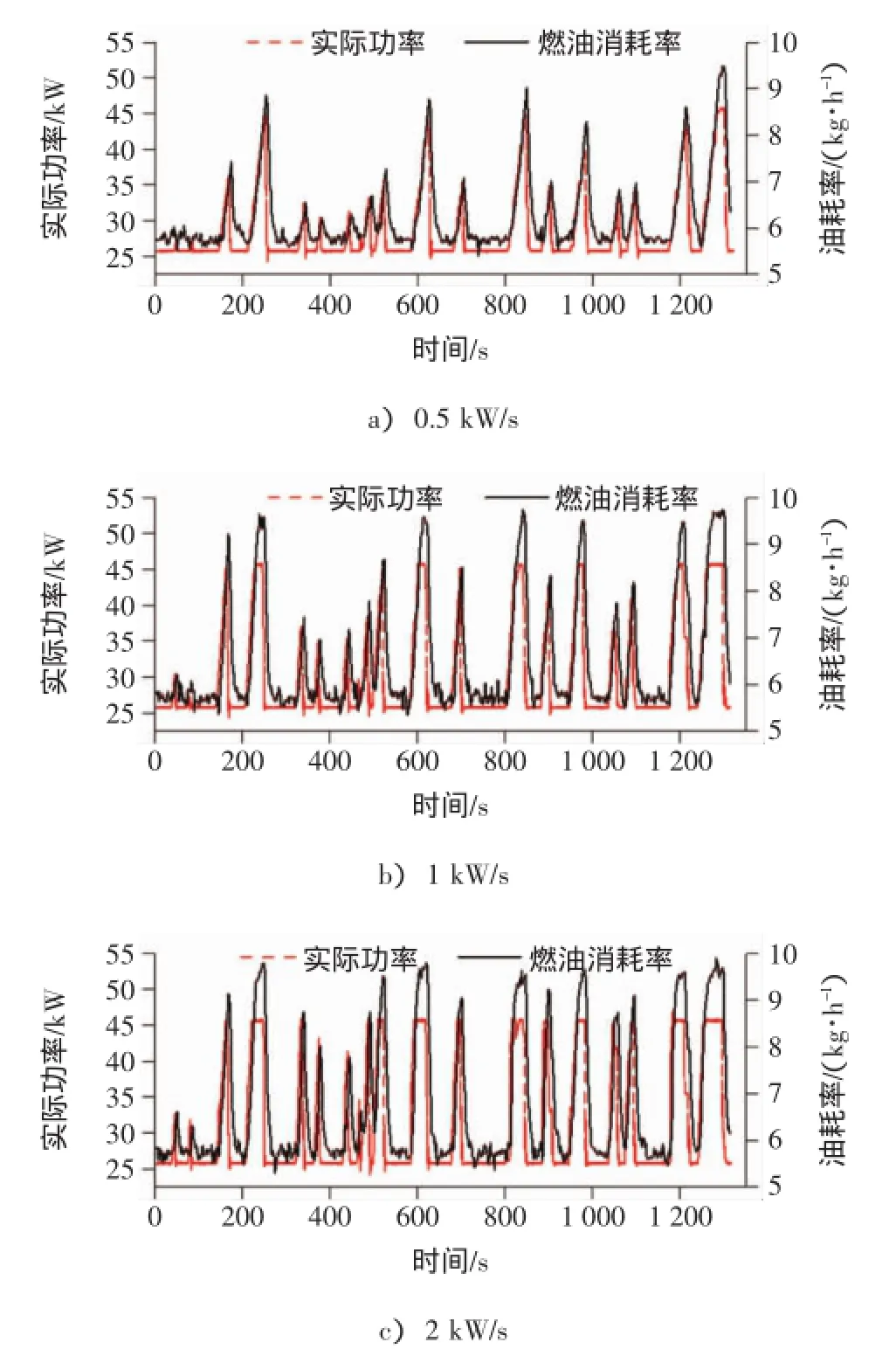
图10 不同功率上升速度下发动机的实际功率与油耗
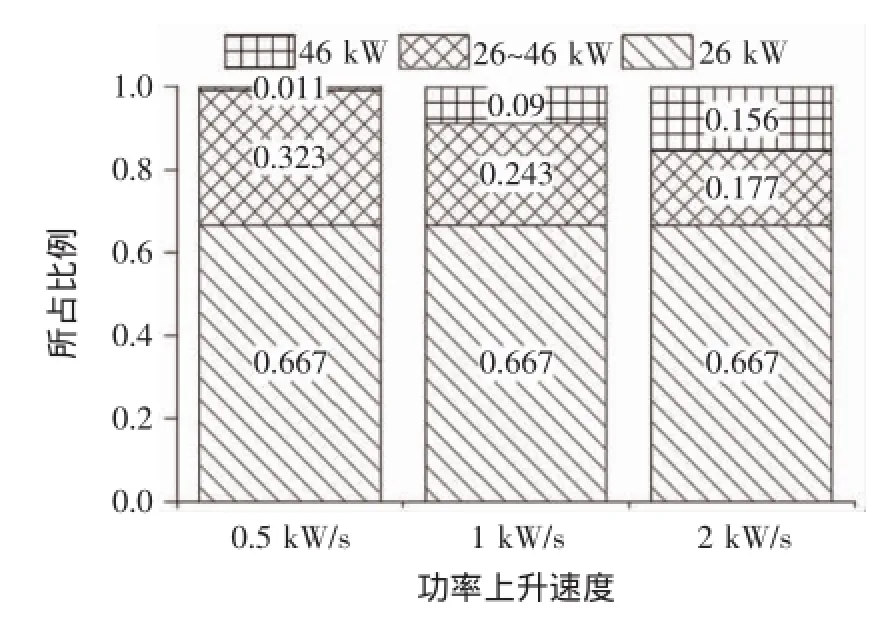
图11 不同功率上升速度下发动机工作点时间分布
从图11中可以看出,随着功率上升速度限值的增加,发动机更长时间地工作在46 kW的工作点上。26 kW和46 kW工作点的燃油消耗率分别为220 g/(kW·h)和210 g/(kW·h),即使有33.3%的点工作在最高功率点上,其循环比油耗为216.5 g/(kW·h),即使全部时间工作在最低功率点上,其循环油耗为220 g/(kW·h)。可见,不同功率上升速度对循环油耗影响不大,如表1所示。

表1 不同功率上升速度下CCBC循环的比油耗
图12所示为不同转速和空燃比下发动机超细颗粒排放数量浓度与质量浓度。由图12可知,空燃比在25左右时,超细颗粒排放数量浓度和质量浓度最低。当负荷增加空燃比小于25时,缸内燃烧状况恶化,高温缺氧区域增加,超细颗粒排放数量浓度和质量浓度呈指数级快速增长。当负荷减小空燃比大于25时,随着空燃比的增加,超细颗粒排放数量浓度略有增加,质量浓度略有减小,这主要是因为颗粒聚并作用减弱,且氧化作用增强引起的[7]。

图12不同转速和空燃比下发动机超细颗粒排放数量浓度与质量浓度
图13是不同功率上升速度限值下对应的发动机空燃比及超细颗粒排放数量浓度。从图中可以看出,在加速加载过程,由于进气滞后[8],而喷油无滞后,空燃比明显减小,导致超细颗粒排放数量浓度增加,出现峰值,且功率上升速度越大,峰值越大。

图13不同功率上升速度限值下超细颗粒排放数量浓度
图14所示为不同功率上升速度限值下对应的超细颗粒排放质量浓度。由图可见,在发动机加速加载过程也出现颗粒质量浓度的峰值,且该峰值随着功率上升速度的增加而增加。质量浓度峰值比其他工况点下的质量浓度大4个数量级。同样地,发动机瞬变过程中的尾气颗粒质量浓度峰值是由过低空燃比引起的。
表2所示为不同功率上升速度限值下对应循环超细颗粒排放比数量和比质量。从表中可以看出,循环超细颗粒排放比数量和比质量远高于稳态插值结果,这主要是因为功率上升速度较大时,易出现由于进气滞后引起的空燃比谷值。随着功率上升速度的增加,都显著增加。
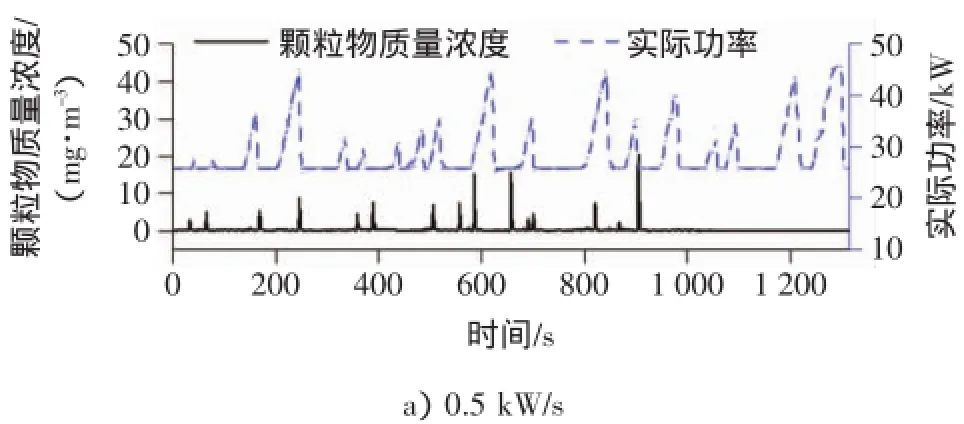
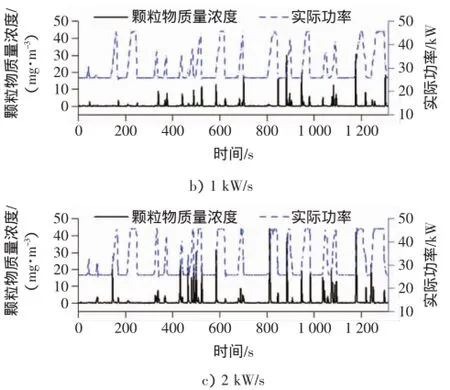
图14 不同功率上升速度限值下的超细颗粒质量浓度

表2 不同功率上升速度限值下循环超细颗粒排放
图15所示为不同功率上升速度限值下的NOx排放体积浓度。由图可知,当空燃比在25左右,NOx体积浓度达到峰值,当负荷增加导致缸内空燃比小于25时,缺氧导致NOx体积排放急剧减小,而当负荷减小导致缸内空燃比大于25时,缸内温度降低导致NOx体积排放也逐渐减小。相同空燃比下,随着转速的增加,NOx排放体积浓度降低,这是由于转速增加后,NOx生成反应时间缩短。
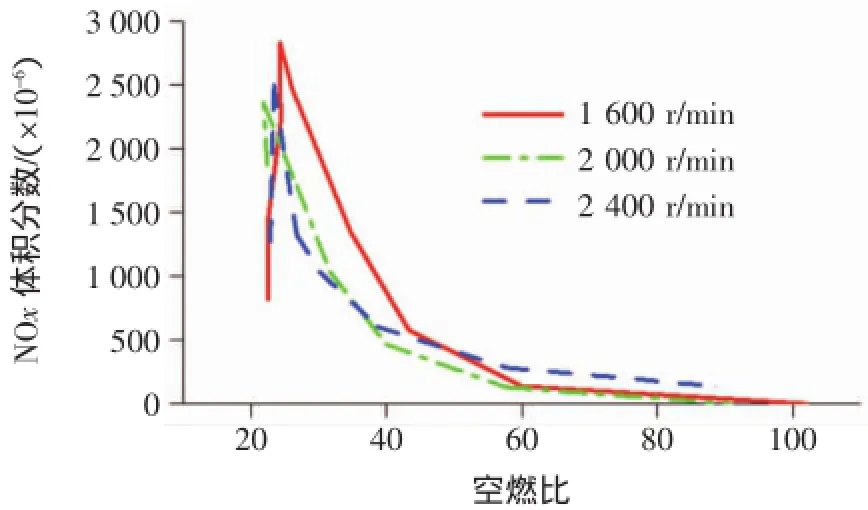
图15不同转速和空燃比下NOx体积分数
图16所示为不同功率上升速度限值下对应的NOx排放体积分数。从图中可以看出,当发动机处于加速加载中,会出现NOx排放谷值,且功率上升速度越小,谷值持续时间越长。这主要是因为增程器工作路径经过了NOx排放较低的区域,如图2所示,功率上升速度越小,在该区域停留的时间越长,故而谷值持续时间越长。

图16 不同功率上升速度限值下的NOx排放体积分数
表3所示为不同功率上升速度限值下对应循环NOx比排放。由表可见,NOx比排放低于稳态插值结果,这主要是因为瞬态过程空燃比出现谷值以及温度上升滞后导致高温富氧区域减少引起的[8]。随着功率上升速度的增加,NOx比排放逐渐增加。这主要是因为功率上升速度越快,发动机停留在工作路径中NOx低排放区域时间越短。
考虑到增程式电动公交车每日都将出现增程模式,为了最大限度地延长电池使用寿命,又同时能避免柴油机主要的超细颗粒及NOx排放增加太多,选择功率上升速度限值为1 kW/s。

表3 不同功率上升速度限值下NOx排放
4 结论
1)当增程器发动机功率下降速度限值较大时,减速减载过程中,会出现较明显的发动机转速超调的震荡。综合考虑制动余量和增程器NVH,最大功率下降速度限值定为-8 kW/s。
2)随着增程器发动机功率上升速度限值的增大,循环工况下发动机输出的能量增加,可以减少电池的充放电,且比油耗基本不变,但超细颗粒排放比数量和比质量都会显著增加,NOx比排放也有所增加。
3)考虑到增程式电动公交车每日都将出现增程模式,为保证电池寿命,同时避免排放增加太多,选择功率上升速度限值为1 kW/s。
1Maradona R.,Steve K.,Dan S.,et al.Advanced energy management strategies for range extended electric vehicle[C].SAE Paper 2015-26-0121
2朱武喜,孙立清.增程式电动公交客车控制策略研究[J].汽车技术,2013(4):1-5
3董欣阳.增程式电动轿车动力系统控制策略设计及优化研究[D].合肥:合肥工业大学,2015
4闵海涛,叶冬金,于远彬.增程式电动汽车控制策略的优化[J].汽车工程,2014(8):899-903
5林浩强.增程式电动客车增程器能量管理策略及发动机瞬态性能研究[D].上海:同济大学,2016
6曹桂军,闫凤军,李雪峰,等.串联式混合动力客车辅助功率单元控制研究[J].汽车工程,2007,29(4):321-324
7楼狄明,徐宁,范文佳,等.国Ⅴ柴油机燃用丁醇-柴油混合燃料颗粒粒径分布特性试验研究[J].环境科学,2014,35(2):526-532
8Rakopoulos C D,Dimaratos A M,Giakoumis E G,et al.Exhaust emissions estimation during transient turbocharged diesel engine operation using a two-zone combustion model[J].International Journal of Vehicle Design,2009,49(1/2/3):125-149
Experimental Research on Control Strategy of Range-extender for Electric Bus
Yan Haibo1,Lou Diming2,Xu Ning2,Zhang Mengchao2
1-SAIC Motor Passenger Vehide Company(Shanghai,201804,China)2-School of Automotive Studies,Tongji University
Based on a range-extended electric city bus,working path and control strategy of a diesel engine powered range-extender are designed.Then with the help of a dedicated test system,experimental study on engine dynamic following,fuel consumption and emissions characteristics caused by different engine power rising and falling rate limits are carried out.The results showed:if the range extender engine power falling rate limit is too large,engine speed is more likely to overshoot and shock during process of speed and load decreasing.Taken regenerative braking and NVH all into account,the maximum speed limit is set as-8 kW/s.With the range extender engine power rising rate limit increasing,during CCBC,the energy output from engine increases which can reduce battery charging and discharging,and the specific fuel consumption hardly changes,but number and quality of ultrafine particulate emission increase significantly,and NOx emission ratio also increases.For range-extended electric buses,who have almost daily extended-range mode,in order to ensure the battery life with emissions increasing not too much,power rising rate limit of 1 kW/s is selected.
Range-extender,Control strategy,Power rising rate limit,Power falling rate limit
U472.7
A
2095-8234(2016)04-0001-07
2016-05-05)
国家科技支撑计划(2014BAG06B01)。
严海波(1978-),男,工程师,硕士,主要研究方向为新能源汽车动力系统控制策略优化。
猜你喜欢
汽车实用技术(2022年4期)2022-03-07 03:47:32
能源工程(2020年6期)2021-01-26 00:55:22
汽车实用技术(2020年2期)2020-02-25 03:19:53
山东冶金(2019年3期)2019-07-10 00:54:04
电镀与环保(2018年4期)2018-08-20 03:08:10
消费导刊(2018年10期)2018-08-20 02:57:02
汽车文摘(2017年5期)2017-12-05 16:34:04
汽车文摘(2017年10期)2017-12-02 01:10:31
环境保护与循环经济(2017年8期)2017-03-22 01:29:08
通信电源技术(2016年1期)2016-04-16 04:57:26