
自动驾驶之觞
2016-10-18 13:09
汽车博览 2016年9期
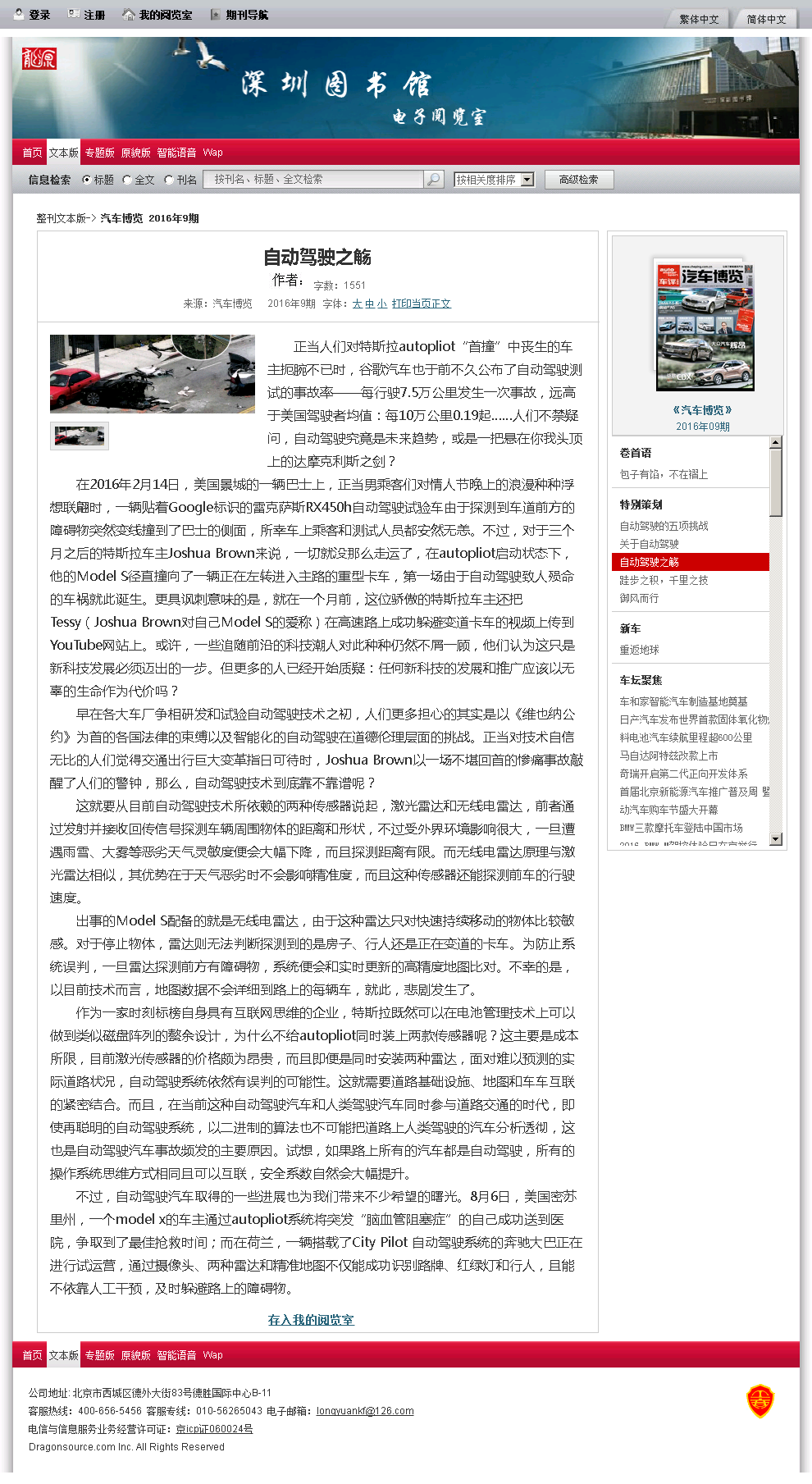
正当人们对特斯拉autopliot“首撞”中丧生的车主扼腕不已时,谷歌汽车也于前不久公布了自动驾驶测试的事故率——每行驶7.5万公里发生一次事故,远高于美国驾驶者均值:每10万公里0.19起……人们不禁疑问,自动驾驶究竟是未来趋势,或是一把悬在你我头顶上的达摩克利斯之剑?
在2016年2月14日,美国景城的一辆巴士上,正当男乘客们对情人节晚上的浪漫种种浮想联翩时,一辆贴着Google标识的雷克萨斯RX450h自动驾驶试验车由于探测到车道前方的障碍物突然变线撞到了巴士的侧面,所幸车上乘客和测试人员都安然无恙。不过,对于三个月之后的特斯拉车主Joshua Brown来说,一切就没那么走运了,在autopliot启动状态下,他的Model S径直撞向了一辆正在左转进入主路的重型卡车,第一场由于自动驾驶致人殒命的车祸就此诞生。更具讽刺意味的是,就在一个月前,这位骄傲的特斯拉车主还把Tessy(Joshua Brown对自己Model S的爱称)在高速路上成功躲避变道卡车的视频上传到YouTube网站上。或许,一些追随前沿的科技潮人对此种种仍然不屑一顾,他们认为这只是新科技发展必须迈出的一步。但更多的人已经开始质疑:任何新科技的发展和推广应该以无辜的生命作为代价吗?
早在各大车厂争相研发和试验自动驾驶技术之初,人们更多担心的其实是以《维也纳公约》为首的各国法律的束缚以及智能化的自动驾驶在道德伦理层面的挑战。正当对技术自信无比的人们觉得交通出行巨大变革指日可待时,Joshua Brown以一场不堪回首的惨痛事故敲醒了人们的警钟,那么,自动驾驶技术到底靠不靠谱呢?
这就要从目前自动驾驶技术所依赖的两种传感器说起,激光雷达和无线电雷达,前者通过发射并接收回传信号探测车辆周围物体的距离和形状,不过受外界环境影响很大,一旦遭遇雨雪、大雾等恶劣天气灵敏度便会大幅下降,而且探测距离有限。而无线电雷达原理与激光雷达相似,其优势在于天气恶劣时不会影响精准度,而且这种传感器还能探测前车的行驶速度。
出事的Model S配备的就是无线电雷达,由于这种雷达只对快速持续移动的物体比较敏感。对于停止物体,雷达则无法判断探测到的是房子、行人还是正在变道的卡车。为防止系统误判,一旦雷达探测前方有障碍物,系统便会和实时更新的高精度地图比对。不幸的是,以目前技术而言,地图数据不会详细到路上的每辆车,就此,悲剧发生了。
作为一家时刻标榜自身具有互联网思维的企业,特斯拉既然可以在电池管理技术上可以做到类似磁盘阵列的赘余设计,为什么不给autopliot同时装上两款传感器呢?这主要是成本所限,目前激光传感器的价格颇为昂贵,而且即便是同时安装两种雷达,面对难以预测的实际道路状况,自动驾驶系统依然有误判的可能性。这就需要道路基础设施、地图和车车互联的紧密结合。而且,在当前这种自动驾驶汽车和人类驾驶汽车同时参与道路交通的时代,即使再聪明的自动驾驶系统,以二进制的算法也不可能把道路上人类驾驶的汽车分析透彻,这也是自动驾驶汽车事故频发的主要原因。试想,如果路上所有的汽车都是自动驾驶,所有的操作系统思维方式相同且可以互联,安全系数自然会大幅提升。
不过,自动驾驶汽车取得的一些进展也为我们带来不少希望的曙光。8月6日,美国密苏里州,一个model x的车主通过autopliot系统将突发“脑血管阻塞症”的自己成功送到医院,争取到了最佳抢救时间;而在荷兰,一辆搭载了City Pilot 自动驾驶系统的奔驰大巴正在进行试运营,通过摄像头、两种雷达和精准地图不仅能成功识别路牌、红绿灯和行人,且能不依靠人工干预,及时躲避路上的障碍物。
猜你喜欢
汽车观察(2022年12期)2023-01-17
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
车迷(2019年10期)2019-06-24
汽车观察(2018年9期)2018-10-23
瞭望东方周刊(2016年33期)2016-09-08
产品可靠性报告(2015年3期)2015-07-05
城市道桥与防洪(2014年5期)2014-02-27
