光电传感导盲机器人的设计与制作
2016-10-18 04:50梁兰菊杨秀成李峰
枣庄学院学报 2016年5期
梁兰菊,杨秀成,李峰
(1.天津大学精密仪器与光电子工程学院,天津 300072;2.枣庄学院光电工程学院,山东枣庄 277160)
光电传感导盲机器人的设计与制作
梁兰菊1,2,杨秀成2,李峰2
(1.天津大学精密仪器与光电子工程学院,天津300072;2.枣庄学院光电工程学院,山东枣庄277160)
采用履带式底盘作为主体,通过GPS,电子罗盘定位,通过超声波距离传感器和光电传感对行进方向的障碍检测,最后经DSP对各个模块反馈的数据进行综合分析处理后控制履带底盘以预设目的地为终点行进,实现无人操控,自助导引安全到达目的地.
导盲;DSP;电子罗盘;GPS;履带①
0 引言
随着光电传感技术的发展,它所应用的领域越来越广泛,导盲机器人可以帮助盲人到达指定目的地.将光电传感技术与导盲机器人的实际应用结合起来实现帮助盲人行走是本论文的主要研究内容.
1 硬件设计
1.1底盘选择
采用定制的履带式底盘作为动力.金属骨架,螺钉连接,具有结构简单,结实易操控等特点.双履带分别由两个相同型号的的大功率电机驱动,履带采用防滑,成本低的塑料履带.由于电机工作需要较大的电流,所以电机驱动采用L298N的驱动模块,最大输出电流可达到2A安培,4路控制信号输入,分别为两个正转信号,和两个反转信号,这四个信号分别由DSP给出.两路12v大电流输出,直接连接电机.同时L298N有5v稳压功能,为控制单元提供稳定的电源.

图1 履带底盘 图2 光电对管
1.2防撞和防踏空设计
图3是超声波传感器,采用四个超声波距离传感器分别安装在前后左右四个方向以检测行进方向凸起的障碍物.声波产生器产生8个40kHz的声波,声波遇到物体后反射回来,当模块检测返回的声波时给单片机P1^0引脚输入高电平,电平持续时间等于声波发射时间加声波接收时间,其所测距离等于(高电平时间*声速(340M/S))/2;
防踏空由四个光电对管组成,图2是光电对管分别安装在底盘的四个角上,通过一个红外灯泡向地面发射红外光线,同时有一个检测红外的传感器,检测反射回来的光线,当检测不到时表示该方向上的路面是凹进去的不易继续前进,则绕行.

图3 超声波传感器 图4 GPS模块
1.4GPS定位模块
图4是GPS模块,采用neo-6m型GPS模块,为了增强信号的收发能力,把模块安装在机器最上层,并加装陶瓷天线.
1.5电子罗盘
图5是电子罗盘安装的位置,图6是电子罗盘,采用GY-26型电子罗盘,是通过检测地磁场判断东西南北,为了降低机器其他模块产生的磁场干扰,和机器其他金属器件对地磁场的屏蔽,同时放大机器的偏离角度,用塑料条把模块向后水平支出15cm,并保持模块的南北轴线与机器前后方向平行.5v供电,与单片机的数据交换同样采用串口TXD和RXD.
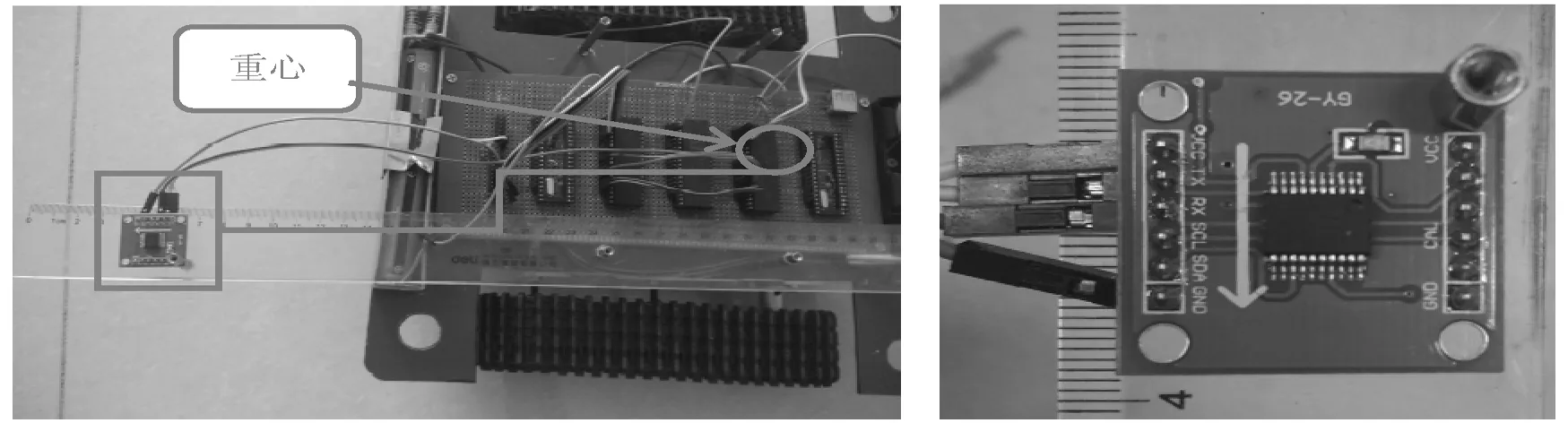
图5 电子罗盘的安装位置 图6 电子罗盘
1.6控制单元设计
图7是控制方框图,图8是单片机的引脚分布和外围电路控制单元,图9是DSP28335模块.由一个DSP做综合运算,5个单片机分管各个模块的协作方式,大大简化程序的编写.多个单片机分别采集超声波模块和光电对管以及电子罗盘的数据,统一送入DSP根据数据判断当前的位置是否有障碍物是否偏离预定路线,做综合分析处理后输出电机的控制信号,控制电机做出正确的动作.
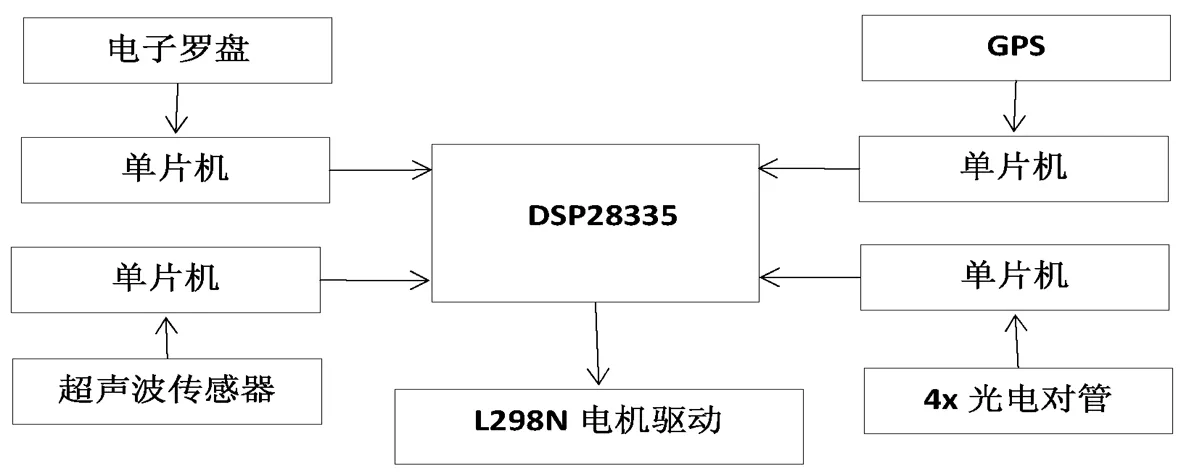
图7 控制方框图
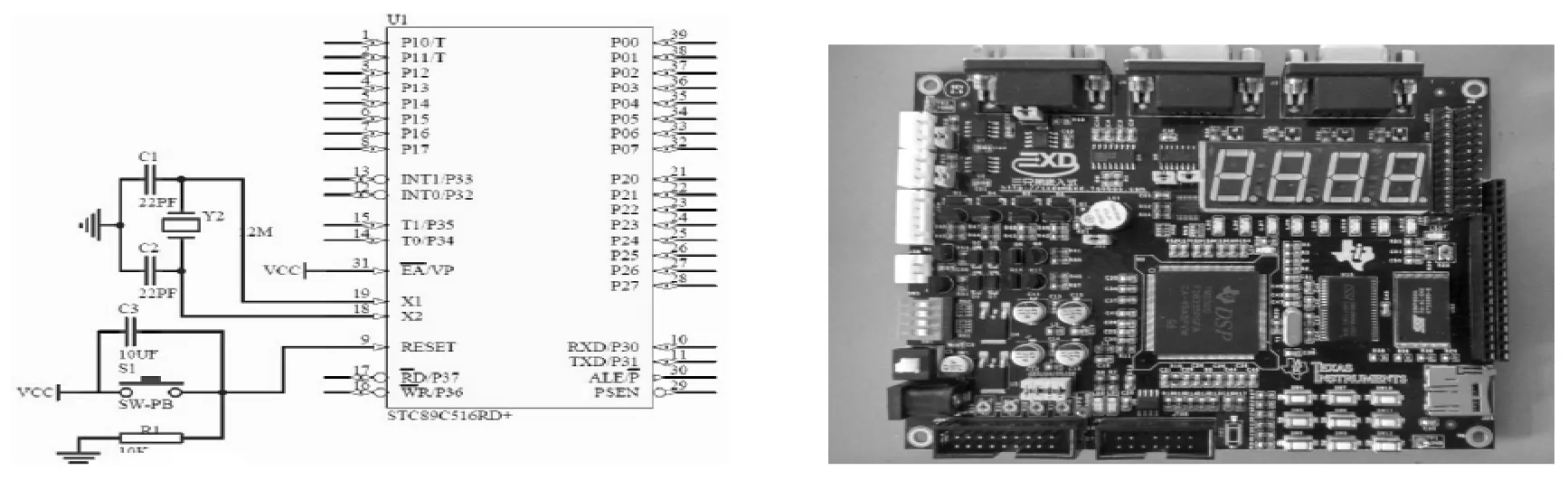
图8 单片机的引脚分布和外围电路 图9 DSP28335模块
2 系统程序设计
2.1程序流程图
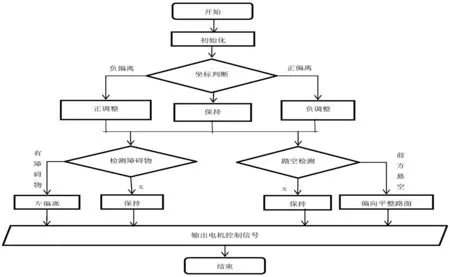
图10 导盲机器人程序设计流程图
2.2程序设计的总体思路
为了简化程序设计的难度,对于导盲机器人的整体程序设计思路,首先根据各模块的复杂程度给其划分独立的单片机,具体分配如下表1,通过单片机驱动和控制各模块并把采集的数据统一输入DSP28335模块.各个模块的驱动程序统一采用厂商提供的例程,根据自己设计的电路修改例程中的输入输出端口.

图11 5块单片机的位置和编号

单片机标号对应模块与单片机引脚连接关系单片机1GPS模块P1^0=TXDP1^1=RXDP3^4=PPS单片机2电子罗盘P1^0=TXP1^1=RX单片机3超声波1超声波2P1^0=EchoP1^1=Trig单片机4超声波3超声波4P1^0=EchoP1^1=Trig单片机5光电对管x4P1^0P1^1P1^2P1^3
2.3DSP28335程序设计
首先给各个单片机分配输入引脚,和定义输出引脚,其对应关系如下表2,然后设置各路数据的优先级.
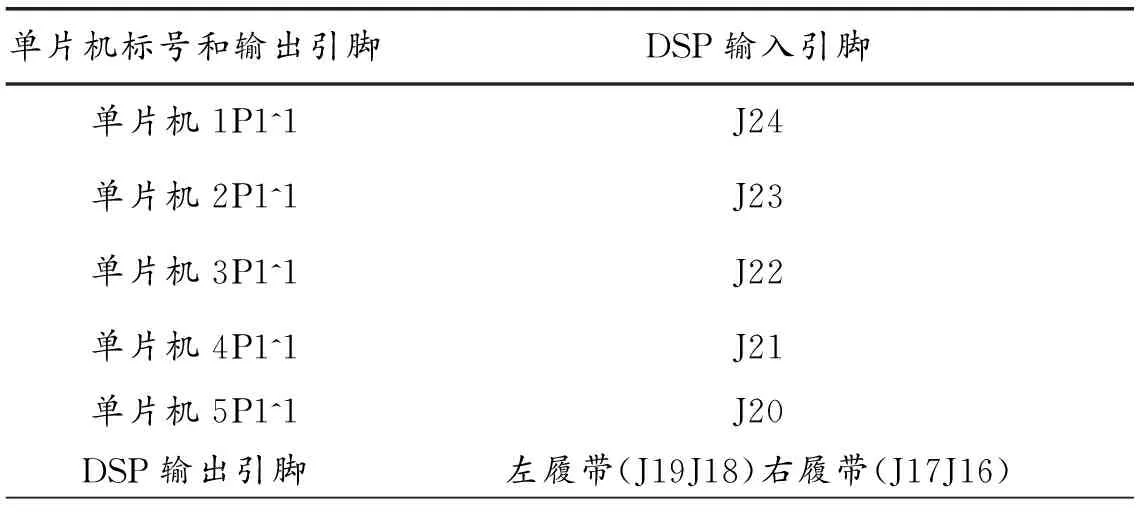
表2 DSP与单片机连接关系
第一优先级,超声波和光电对管,前方路面是否有障碍,和前方路面是否是悬崖,有障碍则转向左,有悬崖则转向左或者右路面,前方正常,则继续前进.
第二优先级,电子罗盘,偏离预设方向角度超过15°,则向反方向调整,否则继续前行.
第三优先级,GPS,对比预设的起始地和目的地的坐标,让机器的起始地址朝趋向目标地址的方向行进.

图12 整体实物图
3 结论
导盲机器人通过GPS和电子罗盘定位,加上超声波距离传感器和光电对管对路障和路面的检测,能够实现自主避开障碍物,避开边沿,向预设目的地前行.根据预设功能,设计了硬件与整体电路,并根据硬件与整体电路设计了相应的部分程序.利用DSP28335的快速处理运算能力,能对复杂的程序做出快速的响应,对5个独立的89c51单片机返回的数据进行分析处理,实现根据当前路面情况和预设目的地输出合理的控制信号控制机器前行.
[1]尼库(Niku, Saeed B).机器人学导论:分析、控制及应用[M].北京:电子工业出版社,2013.
[2]李琦.机器人创新设计与制作[M].北京:中国农业大学出版社,2012.
[3]蔡自兴.机器人学基础(第2版)[M].北京:机械工业出版社,2015.
[4]库克 (Cook, David).机器人制作晋级攻略[M].北京:人民邮电出版社,2013.
[5]王元一,石永生,赵金龙.单片机接口技术与应用:C51编程[M].北京:清华大学出版社,2014.
[6]周乐挺.传感器与检测技术[M].北京:高等教育出版社,2014.
[7]王斌.传感器检测与应用[M].北京:国防工业出版社,2014.
[责任编辑:闫昕]
The Design and Manufacture of Seeing-Eye Robot Using Photoelectric Sensor
LIANG Lan-ju1,2,YANG Xiu-cheng2,LI Feng2
(1.College of Precision Instrument and Opt- Engineering, Tianjin University,Tianjin 300072,China;2.School of Opt-Electronic Engineering, Zaozhuang University, Zaozhuang 277160,China)
The crawler chassis as the main body, through the GPS, electronic compass positioning, on the direction of the obstacle detection by ultrasonic distance sensor and photoelectric sensor, finally by DSP was analyzed for each module, feedback data control to a preset destination chassis for the end of March, to achieve unmanned, self-help guide safe arrival at the destination.
guide; DSP; electronic compass; GPS; track
2016-09-01
中国博士后科学基金(项目编号:2015M571263);枣庄学院博士基金;枣庄学院"光电科学与技术"创新团队(项目编号:4350308);枣庄学院教改重点项目(项目编号:1021402);枣庄学院2016年大学生SRT项目(项目编号:2016003).
梁兰菊(1979-),女,山东菏泽人,天津大学精密仪器与光电子工程学院在职博士后,枣庄学院光电工程学院副教授,博士,主要从事光电科学与技术研究.
O439
A
1004-7077(2016)05-0090-05
猜你喜欢
今日农业(2021年10期)2021-11-27
电子技术与软件工程(2021年23期)2021-03-08
电子制作(2018年19期)2018-11-14
小天使·六年级语数英综合(2018年10期)2018-10-15
电子制作(2018年17期)2018-09-28
作文·初中版(2017年2期)2017-03-06
军事文摘·科学少年(2016年7期)2016-09-20
电子制作(2016年21期)2016-05-17
中国卫生(2015年3期)2015-11-19
中国火炬(2010年4期)2010-07-25