
基于高频脉振信号注入的永磁同步电机转子初始位置辨识
2016-10-13 20:56何忠祥李明勇
船电技术 2016年3期
何忠祥 ,李明勇,朱 磊
基于高频脉振信号注入的永磁同步电机转子初始位置辨识
何忠祥 ,李明勇,朱 磊
(武汉船用电力推进装置研究所 ,武汉 430064)
基于高频脉振信号注入的转子初始位置辨识会存在收敛不成功的现象,这直接影响了电机的启动转矩。针对这一现象,本文首先建立了表贴式永磁同步电机在高频信号注入时的数学模型,并对初始位置辨识策略的收敛特性进行了分析,得出位置辨识收敛成功的限制条件,进而提出改进的初始位置辨识算法。仿真分析验证了该文理论分析的正确性和所提方法的有效性。
表贴式永磁同步电机 无位置传感器 转子初始位置辨识 高频脉振电压 收敛域
0 引言
永磁同步电机矢量控制调速系统由于其具有结构简单、尺寸小、功率密度高、动态性能好等优点,广泛应用于风力发电、船舶电力推进等领域。在永磁同步电机矢量控制启动过程中,转子初始位置信号通常由编码器等传感器提供,这些机械装置会使系统的可靠性降低。转子初始位置的准确程度直接决定电机启动转矩的大小,甚至不能正常启动,因此,基于无位置传感器的永磁同步电机转子初始位置的辨识备受重视。
目前大多利用电机的凸极效应得到电机的初始位置信息,具体是指通过注入电压/电流信号,根据轴电感的差异,从电流/电压的响应中提取位置信息。文献[1]和[2]利用磁路的饱和凸极效应,分析电感随注入电压脉冲信号、转子位置之间的变化,通过比较响应电流的峰值获得转子初始位置,缺点是对检测硬件电路精度要求较高,并且没有分析磁滞效应等因素对电流峰值的影响。有的文献比较分析了旋转高频电压注入和脉振高频电压注入两种方法的位置辨识原理,并给出具体应用时需要考虑的因素。采用高频脉振电压信号注入时,有的文献引入动态电感的概念,将高频信号注入应用在凸极率很小的表贴式永磁同步电机(SPMSM)。通过跟踪电机的凸极效应,已经有很多永磁同步电机无位置传感器初始位置辨识策略,但初始位置辨识有时收敛不成功的根本原因却很少被研究分析。
本文以高频脉振电压注入为例,针对SPMSM首先分析因磁路饱和引起的电机凸极效应,并根据高频激励下的永磁同步电机模型得到转子初始位置的辨识算法,进而运用稳定性判定依据得出初始位置辨识收敛成功的条件,进而提出改进的初始位置辨识算法,仿真分析验证了该文所提方法的有效性。
1 永磁同步电机高频激励模型
为了最大限度的利用铁磁材料,通常将SPMSM空载时直轴磁路的工作点设计在曲线的拐点处。因而,向直轴通入正电流id时,铁磁材料工作点进入饱和区,直轴电感减小;交轴磁路工作点通常位于不易饱和的原点,交轴电感恒定。通过类似分析,可得Ld< Ld=Lq=Lq。
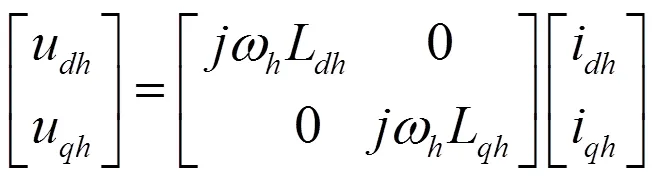
考虑到电流PI调节器带宽的设置、电压传感器成本问题和输出转矩波动的要求,选择将高频脉振电压信号注入d轴,然后根据电流反馈信号求出位置信息。
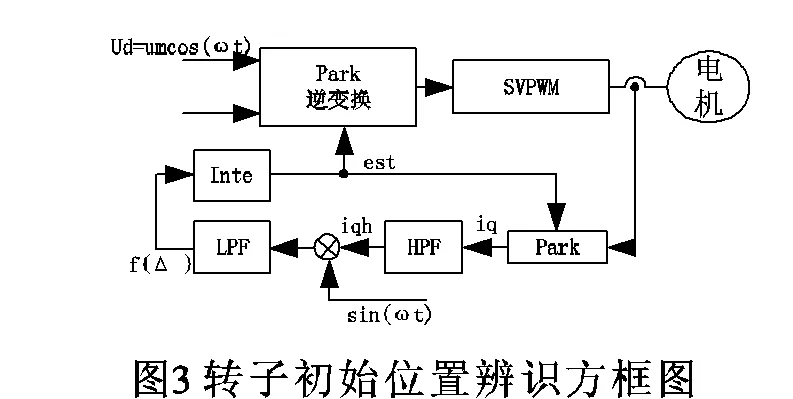
2 初始位置提取
在进行位置辨识时,电机参数和高频注入的信号不再变化,因而可以认为信号的幅值与位置辨识差正相关。通过旋转坐标变换或者低通滤波器可提取出幅值信息。将q轴高频电流和正弦同相位信号相乘后,经过低通滤波器,可以很好的滤除产生的二倍频余弦信号,还能够有效的滤除因SVPWM调制产生的载波频率电流。
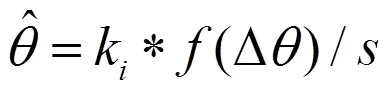
其中
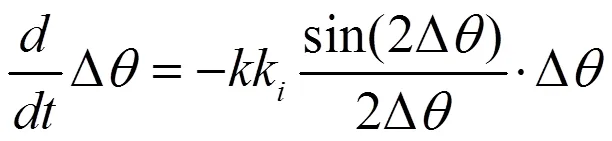
下面对上面提出的转子初始位置辨识策略稳定性和稳定域进行分析。
初始位置辨识时,转子处于静止状态,则

将辨识位置差作为状态变量,可得状态方程:
3 d轴正方向的判断和补偿
从初始位置辨识稳定性分析可知此方法只能估计出d轴所在的位置,但并不能判断出NS极,所以上面分析中出现的情况。因此,有必要寻找出一种能够判断出NS极的方法,对辨识的转子位置判断是否需要补偿p角度。
本文采用注入幅值恒定、相位分别为qest和qest+p的两个脉冲电压信号,通过分析电流的响应来判断d轴的正向。注入脉冲电压信号时,电机绕组状态类似于一阶RL阻感负载的零状态响应。
响应可以用下面的公式表示。
从上可知,电流稳态时电流保持为/。电感大小会影响电流响应速度和峰值大小。前面已经分析Ld<Ld,电感较小时,电流响应比较快,峰值较大。电流峰值的测量对采样硬件和采样频率有很高的要求,本文选择比较电流从稳态值衰减到零所用时间的大小来进行直轴的判断,此时的电流衰减公式如下所示。
从上面的公式可以看出,电感比较小时电流的衰减较快,因而有,根据时间比较的结果可以确定位置是否需要补偿。
4 仿真和分析
为验证本文所提方法的有效性,对一台表贴式永磁同步电机进行了仿真。该电机额定功率87 kW,额定线电压268 V,额定电流201.5A,交直轴电感均为367.5 µH,定子电枢绕组电阻为0.1 Ω,额定转速为810 r/min,极数为10,相数为3,采样频率设定为10 kHz,注入高频信号的频率选择500 Hz,高频信号幅值为40 V,位置辨识初始给定为0,d轴正方向判断施加的电压为4V。
高频脉振电压信号幅值和频率的选择对于位置辨识算法很重要。若电压幅值选择不当,会出现电机抖动、收敛时间过长等问题;若频率选择不当,则会出现采样信号混叠、高频激励模型偏差较大等问题。初始位置辨识时,同时需要注意电感残留能量、磁滞效应对辨识产生的影响。
转子初始位置给定为5p/6时,可得仿真波形图如图4所示。图(a)为判断转子直轴正方向判断时的电流响应图,从中可以看出,第一次电流衰减到零时正为25 ms,第二次电流衰减到零时负为19ms,由于正>负,因而转子初始辨识位置需要补偿p角度;图(b)为整个阶段转子位置辨识的波形图。
转子初始位置给定为p/2时的转子位置估计波形如图5所示。从图可知,结合位置辨识输出初始值的改变和轴正方向的判断,可以得到转子的真实位置。
在(0,2p)范围内取25个点进行初始位置辨识,估计位置和真实位置的差如图6所示。从图可知,当转子位置为π/2的整数倍时,辨识误差较大;位置辨识的最大误差为0.01/rad。
5 结论
本文针对表贴式永磁同步电机提出一种基于高频脉振电压信号注入的转子初始位置的辨识策略。在分析同步电机高频激励模型的基础上,建立高频信号和位置辨识值之间的关系,并对所提辨识策略的稳定域进行了分析。分析结果表明,本辨识策略鲁棒性较强,不依赖电机的准确参数,并且可以很好的应用到内嵌式等结构性凸极的永磁同步电机。仿真分析表明此方法有良好的辨识精度,最大角度偏差仅为0.6°,可以满足闭环启动的要求。
[1] 梁艳,李永东.无传感器永磁同步电机矢量控制中转子初始位置的估算方法[J].电工技术,2003,22(2): 10-13.
[2] Shin Nakashima, Yuya Inagaki, Ichiro Miki. Sensor- less initial rotor position estimation of surface permanent magnet synchronous motor[J]. IEEE Trans. on Industry Application, 2000, 36(6): 1598 -1603.
Intital Rotor Position Estimation of Permanent Magnet Synchronous Motor Based on High Frequency Pulsating Voltage Injection
He Zhongxiang, Li Mingyong,Zhu Lei
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
Based on high frequency pulsating voltage injection, the initial rotor position estimation algorithm maybe result in fail on convergence, which influences the starting torque seriously. To solve the problem, the mathematical model of surface permanent magnet synchronous motor injected by high frequency signal is presented. By analyzing the convergence of the initial position estimation algorithm concretely, the restrictive condition of convergence is given, and then an improved estimation algorithm is proposed. The simulation results show the validity of the theoretical analysis and the feasibility of the estimation strategy.
TM351
A
1003-4862(2016)03-0020-04
2015-11-09作者简介:何忠祥(1991-),男,硕士。研究方向:电机工程。
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
通信电源技术(2018年5期)2018-08-23
通信电源技术(2018年5期)2018-08-23
光学精密工程(2016年3期)2016-11-07
河北地质(2016年4期)2016-03-20
大电机技术(2015年5期)2015-02-27
电测与仪表(2014年13期)2014-04-04
组合机床与自动化加工技术(2014年12期)2014-03-01
汽车电器(2014年8期)2014-02-28
