
机器人集成系统标定测试研究
2016-10-13 19:20:13华伟刘焱
自动化与信息工程 2016年6期
华伟 刘焱
机器人集成系统标定测试研究
华伟1刘焱2
(1.东莞技研新阳电子有限公司 2.东莞新友智能科技有限公司)
针对机器人集成系统定位标定误差较大的问题,提出一种机器人集成系统定位标定测试方法。首先运用机器人微分几何学结合拉线编码器、陀螺仪传感器测量数据,并设计递推公式;然后依据国家标准关于三边测量法、惯性测量法和三角测量法测试数据统计分析的要求,识别机器人应用系统的误差;最后通过修正运动控制系统参数,实现机器人原点标定和参数补偿,使机器人集成系统达到运用场景要求。
机器人集成系统;拉线编码器;陀螺仪传感器;集成系统标定;运动控制系统
0 引言
机器人定位、工具端定位和工件定位是影响机器人集成系统有效运作的3个因素,其有效性和经济性是机器人普及运用的前提。用于系统定位的传统标定测试方法主要有三边测量法和三角测量法。针对这2种标定测试方法国内外学者已做很多研究,王小平等(2012)研究三边测量法的结果稳定性[1];丁少文等(2013)在移动机器人定位中,根据同一位姿下机器人与不同信标点的3个相对角值,应用三角测量法实现机器人的定位,并提出基于扩展卡尔曼滤波的相对角动态估计方法,实现机器人移动过程中三角测量法的连续动态应用[2];刘艳等(2015)为提高三边测量法定位精度,将三边测量法和最小二乘法结合起来进行机器人定位坐标计算,减小定位误差[3]。现有研究较多集中在应用三角测量法或三边测量法来减小某一类别定位误差,对安装定位、工具端定位和工件定位三者联系分析定位的研究较少。本文提出一种适应于机器人运用场景标定测试方法,将安装定位、工具端定位和工件定位以及三者之间绝对误差分析、系统误差标定联系起来,通过补偿系统误差获得最佳使用精度、便捷使用的测试方法[4-6]。
1 标定测试系统描述
1.1 标定测试系统框图
标定测试系统的组成框图如图1所示,包括3个拉线编码器(EL)、3个陀螺仪(IMU)、1个运动控制系统(MC)和1台测试用计算机(PC);被测设备包括XYZR直交机器人集成装备、水平四轴机器人集成装备和六轴机器人集成装备等设备。
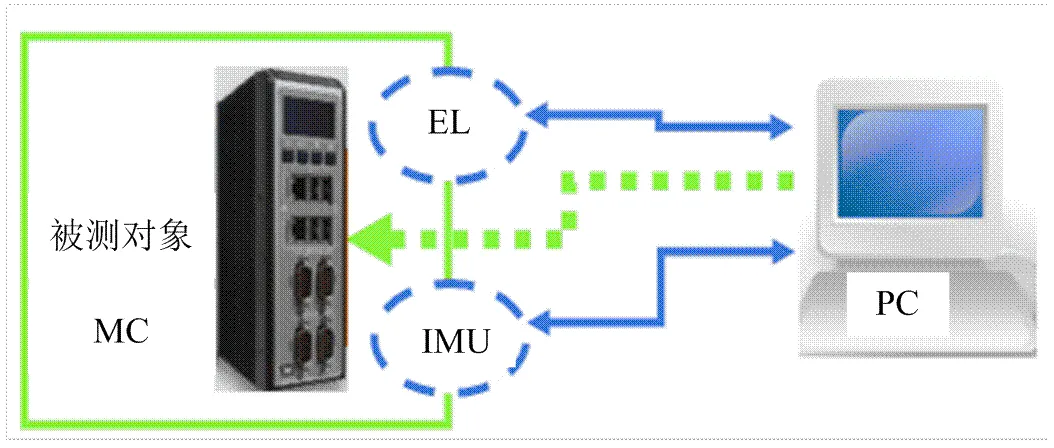
图1 标定测试系统的组成框图
标定工具将3个EL和3个IMU安装在被测装备的设定位置(一般为工具端)。PC向被测装备的MC发出特定运动指令,并同时触发3个EL和3个IMU;被测装备按指令运动时,3个EL和3个IMU向PC传递测试数据;PC接收数据,按既定程序和算法分析、计算,并与被测装备MC发出的设定运动指令进行比较,得出测量结果。
1.2 测试数据规格
IMU测试数据规格和EL测试数据规格如表1和表2所示。
1.3 标定测试系统测量方法
1)三边测量法
三边测量法的计算模型如图2所示,3个EL测试数据分别为1、2、3;其间距离为;工具端坐标为:、、。
由毕达哥拉斯定理得
=(12-22+2)/2
=12-32-2+ (-)2+2
=12-2-2
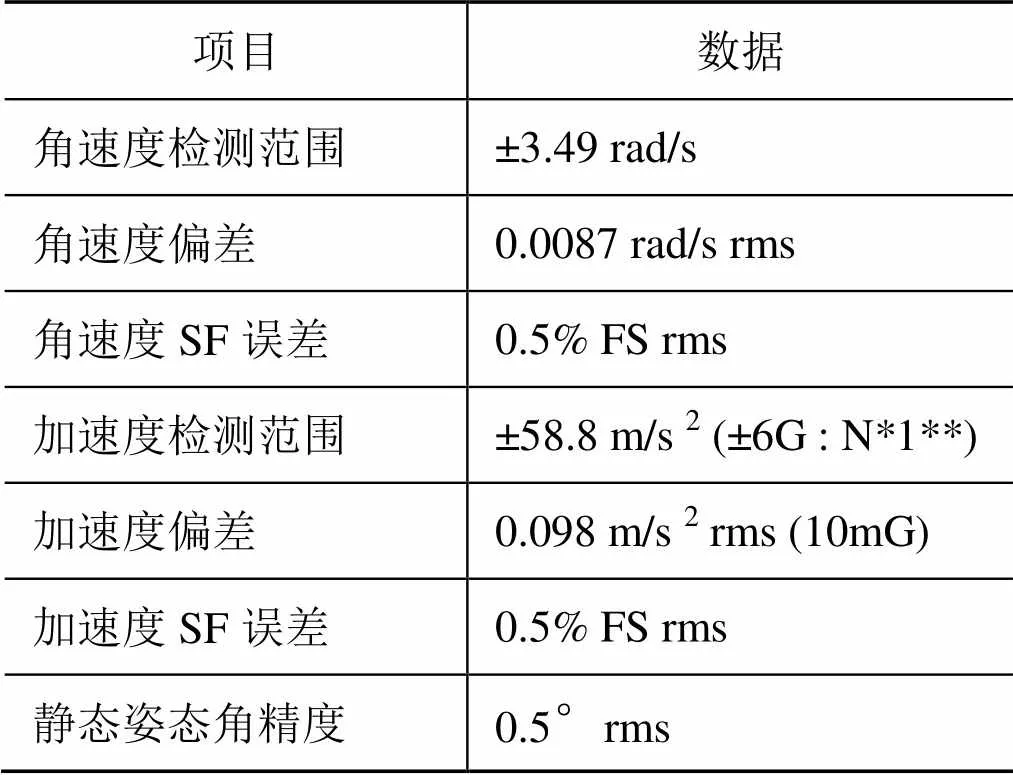
表1 IMU测试数据规格
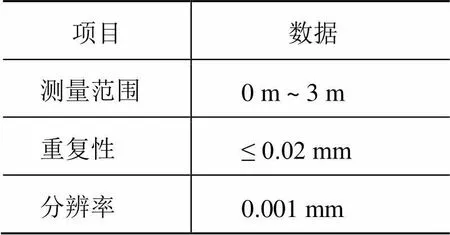
表2 EL测试数据规格

图2 三边测量法的计算模型
2)三角测量法
三角测量法计算模型如图3所示,3个IMU测试数据分别为方位角1、2、3;俯仰角1、2、3;侧偏角1、2、3;可用基线长度12,确定被测装备设定位置的坐标、、。
由三角函数定理得
=12sin1sin2/ (sin1+sin2)
=/tan1
=(2+2) tan1
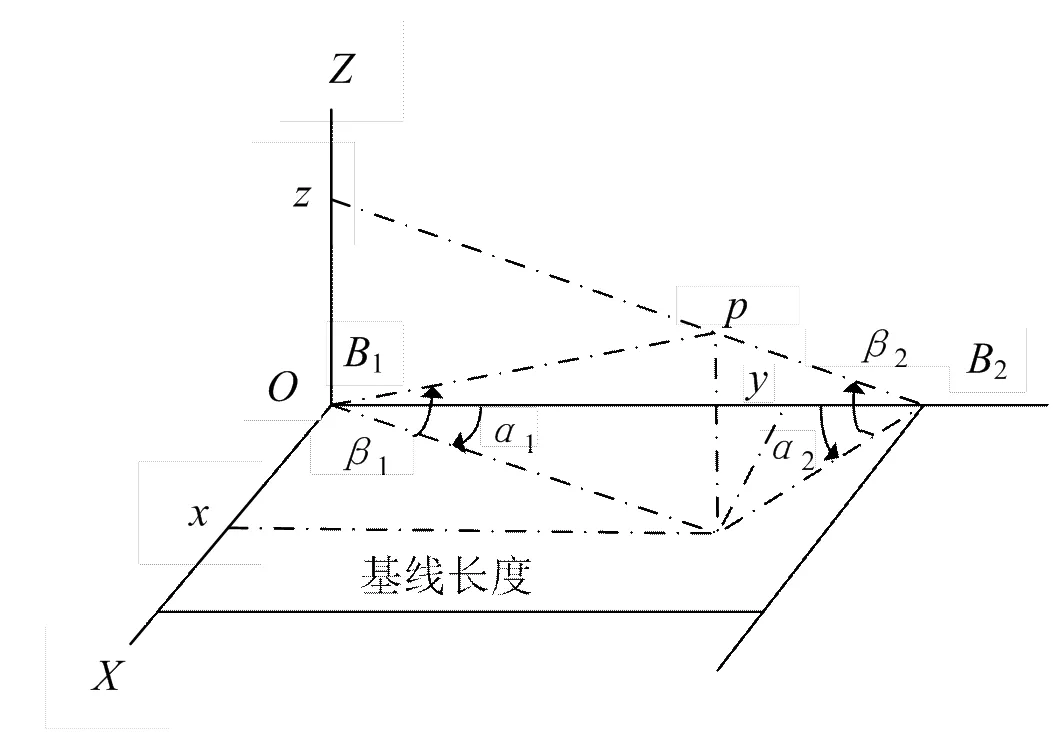
图3 三角测量法计算模型
2 标定项目测试
参照《GB/T12642-2013工业机器人性能规范及其试验方法》进行试验方法研究::1) 位姿准确度和位姿重复性;2) 多方向位姿准确度变动;3) 距离准确度和距离重复性;4) 位置稳定时间;5) 位置超调量;6) 位姿特性漂移;7) 轨迹准确度和轨迹重复性;8) 重复定向轨迹准确度;9) 拐角偏差;10) 轨迹速度特性。
2.1 测量原点测定
1)在指定位置安装固定好3个EL和3个IMU测试治具,如图4所示;
2)被测设备以额定速度的10%对各运动轴分别进行测试:移动到2/3额定行程处,然后返回设备原点,此时测试软件记录EL值和电子陀螺仪IMU值;
3)重复步骤2)50次;

图4 (a) 安装位⑴

(b) 安装位⑵
4)计算各运动轴原点位置正态分布,如图5(a)所示,标准偏差应少于规格值1/6,否则提示“xx轴原点超差,需校正”;
5)按步骤4)提示对机械结构进行校正,重复步骤2)、3)、4)直到满足设计要求,如图5(b)所示;
(a) 校正前
(b) 校正后
图5 运动各轴原点位置正态分布图
6)被测设备以额定速度的10%对各运动轴同时进行测试:移动到2/3额定行程处,然后回设备原点,此时测试软件记录3个EL和3个IMU测试数据;
7)重复步骤6) 50次;
8)计算各运动轴联动回原点位置正态分布,标准偏差应少于规格值1/3,否则提示“回原点超差,需校正”;
9)按步骤8)的提示对机械结构进行校正,并重复步骤6)、7)、8)直到满足设计要求;
10)取中心值为EL和IMU相对刻度零点。
2.2 位置重复性试验
1)规划测试轨迹时,可根据机器人集成装备实际使用场景和机器人本体绝对定位精度合理调整。本测试系统按国标GB/T12642-2013/ISO 9283:1998规范试验轨迹实例,如图6所示。

图6 试验轨迹实例
①在1-2-7-8平面,由PC按1-2-3-4-5顺序依次向MC发出运动指令(包含位置、速度、加减速度信息),PC接收3个EL和3个IMU测试数据,并依次计算1-2-3-4-5坐标值;
② PC从MC读取各运动轴在1-2-3-4-5的变量值;
③测试软件按国标GB/T12642-2013/ISO 9283:1998规范之7.2.1位姿准确度(AP)定义,分析计算3个EL和3个IMU测试数据,并依次计算出1-2-3-4-5位置准确度;
④测试软件按国标GB/T12642-2013/ISO 9283:1998规范之7.2.1位姿准确度(AP)定义,分析计算MC中变量值,并依次计算出1-2-3-4-5机器人系统位置准确度;
⑤测试软件分析PC指令、3个EL和3个IMU测试数据位置准确度及MC中变量值位置准确度,机器人集成系统位置准确度倾向如图7所示。
图7(a)表明:在1、2、3、4、5点观察的测试数据与MC中变量值位置准确度的量化关系,为现场调试机器人整机装备提供准确信息。
图7(b)表明:1、2、3、4、5点观察的各运动轴测试数据与MC中变量值位置准确度的量化关系,为现场调试机器人整机装备标定系统误差提供准确可靠的信息。

(a) 散布图
(b) 箱线图
图7 机器人集成系统位置准确度倾向
2)重复步骤1)测试数次和调整即可完成机器人集成系统标定,缩短机器人整机系统在现场准备时间,从而用最低成本、最大化提高整机装备的运行精度。
3 结语
1)本测试标定系统避免了复杂运动学计算,位置坐标计算简单快捷、测试数据直观;
2)分步测量、标定的方法提高误差的可辨识性,特别在多个运动学参数耦合严重的情况下,利用精度分析将误差分类标定,加快收敛速度;
3)本方法所使用测试传感器体积小、携带方便,非常适合机器人装备现场安装作业,在相对较短时间内完成现场安装任务。
[1] 王小平,罗军,沈昌祥.三边测量法的结果稳定性研究[J].计算机工程与科学,2012,34(6):12-17.
[2] 丁少文,王林.基于连续三角测量法的机器人定位方法[J].微型电脑应用,2013,30(5):9-12.
[3] 刘艳,董宽.基于超声波传感器的室内机器人定位研究[J].信息技术,2015(8):54-56.
[4] JB/T10825-2008,工业机器人产品验收实施规范[S].
[5] 汪励,陈小艳.工业机器人工作站系统集成[M].北京:机械工业出版社,2014.
[6] 冯亚磊,曲道奎,徐方,等.一种工业机器人零位标定方法:中国,CN103659806A[P].2014-03-26.
Research on Positioning and Testing of Robot Integrated System
Hua Wei1Liu Yan2
(1. Dongguan Shintech Electronics Co., Ltd. 2.Dongguan Shinyou Intelligent Technology Co., Ltd.)
Focusing on the problem of large calibration error of robot integrated system, a method of locating and calibrating the robot integrated system is proposed. Firstly, using the differential geometry of the robot and combining the cable encoder and the gyro sensor measurement data, the recursive formula was proposed. And then according to the statistical analysis requirements described in the national standard specification of the trilateral measurement method, inertial measurement and triangulation test, the error of the robot application system was calculated. Finally, the robot’s origin calibration and parameter compensation are realized by modifying the parameters of the motion control system, which makes the robot integrated system to achieve the use of scene requirements.
Robot Integrated System; Cable Encoder; Gyro Sensor; Integrated System Calibration; Motion Control System
华伟,男,1970年生,工程师,本科,主要从事机械设备研发工作。
刘焱,男,1974年生,工程师,专科,主要从事工业机器人及智能装备的研发工作。
猜你喜欢
河北理科教学研究(2021年2期)2021-08-18 08:34:00
中等数学(2021年1期)2021-07-23 01:41:00
音乐天地(音乐创作版)(2019年10期)2020-01-06 11:51:54
测控技术(2018年10期)2018-11-25 09:35:40
浙江工业大学学报(2017年5期)2018-01-22 02:03:40
中小企业管理与科技·下旬刊(2017年7期)2017-08-24 02:13:53
测绘科学与工程(2016年4期)2016-04-17 06:51:08
音乐天地(音乐创作版)(2016年1期)2016-04-03 09:13:06
中国房地产业(2016年9期)2016-03-01 01:26:46
机械工程师(2015年10期)2015-02-02 01:14:29
