
四旋翼垂直起降固定翼飞行器设计
2016-10-11 00:26匡银虎刘明远石矿林
科技视界 2016年24期
关键词:模型飞机
匡银虎 刘明远 石矿林

【摘 要】四旋翼垂直起降固定翼飞行器兼具多旋翼飞行器和固定翼飞行器的优点,能够垂直起降、定点悬浮,还可以高速巡航飞行,是极具发展潜力的新型飞行器。以四旋翼与固定翼相结合的总体设计思路,应用AutoCAD和Profili设计软件,经过反复的试验,设计并制作出了能够实现垂直起降功能的模型飞机。并且通过对APM飞控源码的深入研究,利用Arduino语言编写了飞行器的控制代码,在APM 中新增了垂直起降模式,最终实现了多旋翼与固定翼的转换。
【关键词】模型飞机;垂直起降;APM自驾仪
垂直起落技术顾名思义就是飞机不需要滑跑就可以起飞和着陆的技术。垂直起降飞行器(VTOL,Vertical Take-Off and Landing)能够以零速度起飞/着陆,具备悬停能力,并能以固定翼的方式水平飞行。它是从50年代末期开始发展的一项航空技术。
当前的研究大多数都集中在对四旋翼飞行器控制系统的设计与改进上,而将四旋翼飞行器与固定翼飞机相结合的研究很少。本项目希望结合多旋翼和固定翼飞机的特点设计一款具有垂直起降功能的固定翼模型飞机。此款模型飞机可以实现多旋翼与固定翼飞行模式的相互转换,同时具备直升机垂直起降、空中悬停和固定翼飞机高速巡航的优点。
1 垂直起降飞行器的设计
1.1 飞行器总体布局及设计参数
1.1.1 气动布局
气动布局同飞机外形构造和大部件的布局与飞机的动态特性及所受到的空气动力密切相关。关系到飞机的飞行特征及性能。故将飞机外部总体形态布局与位置安排称作气动布局。简单地说,气动布局就是指飞机的各翼面,如主翼、尾翼等是如何放置的,气动布局主要决定飞机的机动性。
由于常规布局在众多布局中最为成熟,易于设计和后期调试,本项目采用经典的常规布局。
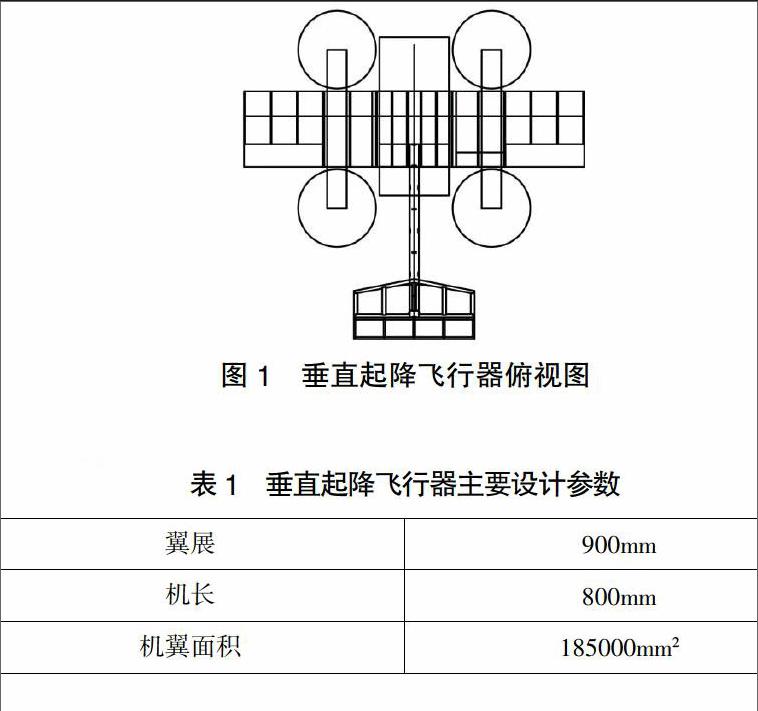
1.1.2 总体布局
为了实现垂直起降的功能,我们采用了把四旋翼和常规布局固定翼叠加的方法设计飞行器。
在不影响固定翼气动布局的前提下,将四旋翼的两条纵向的机架与主翼的肋片固定,横向的机架则由主翼的翼梁充当。与常规四旋翼不同的是,飞行器前方的一对旋翼可以进行70度倾转,用于完成垂直起降和固定翼模式的转换。且在固定翼模式时后方的一对电机停止工作,以节省电力。
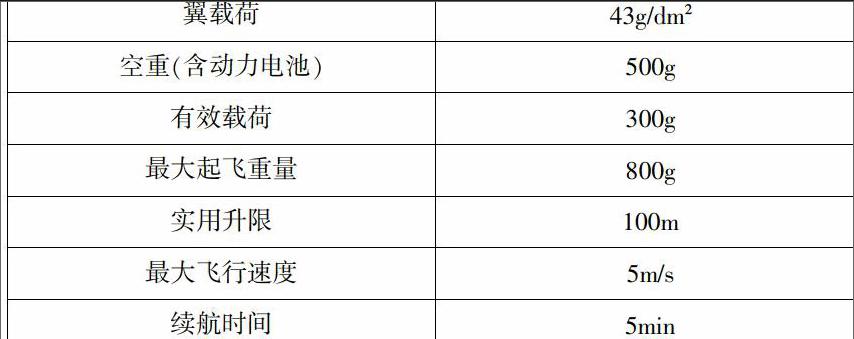
1.1.3 设计参数
1.2 飞行器局部结构的设计
1.2.1 主翼
根据设计的目标参数,希望垂直起降飞行器可以携带一定的载荷,且飞行速度不能太高,为了减轻动力系统重量,阻力也不能太大。平凸翼型是最佳的选择。
在设计翼型时采用Profili翼型设计软件。Profili翼型库中的CLARK-Y型翼是平凸翼中最典型的一种,也是航模爱好者们最常用的一款翼型,其最凸出处为弦长20%处。
为了验证CLARK-Y型翼是否适用于垂直起降飞行器,我们对它进行空动力学分析。首先使用Profili自带的雷诺数计算器计算雷诺数。雷诺数——空气中运动的物体受到空气的黏性力和惯性力的比,简单解释就是空气分子运动中有质量由速度,遇到物体就会对物体有力产生,同时分子和分子之间的相互作用会有黏黏的感觉。具体就不赘述,主要参考规律,飞机越大雷诺数越大,受到黏性力的成分越少。
代入飞行器的最大飞行高度100米,最大飞行速度5米/秒,最大弦长20厘米,得出飞行器的雷诺数约为70000。
我们选用的CLARK-Y型翼在机翼迎角达到5度时,升阻比曲线升到最高点,此时机翼拥有最好的升阻特性,符合垂直起降飞行器的实际情况。同样机翼迎角在5度附近时,CLARK-Y型翼的俯仰力矩最小,此时改变飞行器的俯仰姿态最为容易,也符合垂直起降飞行器的实际情况。
综上,我们可以在飞行器上采用CLARK-Y型翼。
1.2.2 平尾
确定水平尾翼的翼型和面积。水平尾翼对整架飞机来说,也是一个很重要的问题。水平尾翼和机翼的功能恰恰相反,它是用来产生负升力的,所以它起的作用是抬头力矩,以达到飞机配平的目的。由此可知,水平尾翼只能采用双凸对称翼型和平板翼型,不能采用有升力平凸翼型。水平尾翼的面积应为机翼面积的20-25%。我们选定22%,计算后得出水平尾翼的面积为89100平方毫米。同时要注意,水平尾翼的宽度约等于0.7个机翼的弦长。
1.2.3 垂尾
垂直尾翼是用来保证飞机的纵向稳定性的。垂直尾翼面积越大,纵向稳定性越好。当然,垂直尾翼面积的大小,还要以飞机的速度而定。速度大的飞机,垂直尾翼面积越大,反之就小。垂直尾翼面积占机翼的10%。因为垂直起降飞行器飞行速度不高,垂尾的面积可以小一些,我们选择9.8%。通过计算,垂直尾翼面积应为18200平方毫米。在保证垂直尾翼面积的基础上,垂直尾翼的形状,随意性较大。
1.2.4 倾转结构
倾转结构作为垂直起降飞机模式转换的关键执行部件,是整架飞行器上受力最大的部分。因此,在尽量控制飞行器空重的前提下必须进行适当的加固。此处我们采用了机械性能极佳又轻质的碳纤维管作为机架,并且机架两侧的翼肋和这一段的翼梁采用航空层板制作,以减小形变,避免在旋翼倾转过程中机翼被撕裂。
倾转结构上安装了作为飞行器动力的电机和螺旋桨,需要完成使桨平面倾转70度的工作。我们设计的倾转结构使用舵机作为动力,碳纤维管作为旋转轴,航空层板作为作为主要结构。
1.3 飞行器电子设备的选择
1.3.1 飞行器动力系统的选择
本次设计采用的执行电机为无位置传感器无刷直流电机,如图6 所示。相比于传统有刷直流电机,无刷直流电机的可控性强、运行效率高,具有优越的机械特性,并且无位置传感器还减小了电机的复杂程度和飞行器重量。
根据电机厂商提供的数据,Sunnysky X2204无刷电机在搭配GWS8040桨和3S动力电池使用时,最大可以达到420g的拉力。飞行器在垂直起降模式时,4个电机可以产生约1600g绰绰有余的拉力。在固定翼模式时,两个电机的拉力也超过了800g,使推重比超过1,大大增强了飞行器的机动能力。
1.3.2 舵机的选择
在航模飞机上,舵机一般用于控制各个舵面的角度,以此来改变飞行器的姿态。本项目除了在舵面上使用舵机,改变飞行模式的旋转结构也需要用到两个舵机。由于旋转结构所使用的舵机直接与电机座连接,受力非常大,且对旋转角度要求比较精准,所以采用了扭矩较大的金属齿数字舵机。而由于飞行器的速度低,重量小,对舵面控制要求不高,舵面控制采用了质量较轻,扭矩较小的塑料齿模拟舵机。
2 APM开源飞控的研究
2.1 垂直起降模式的编写
本项目通过对开源飞控板APM进行自主编程实现了多旋翼与固定翼的转换,我们将它定义为垂直起降模式。
垂直起降模式实现的具体功能分为两部分:
1)控制舵机转动,当切换模式时,舵机拉动电机,使其转动70度,螺旋桨与机翼垂直。切换回来时,过程相反。
2)控制电机转速,当切换模式时,电机转速由当前转速慢速变为0,当切换回来时,电机转速恢复到四轴模式中该电机应有的转速。
为了实现提出的功能,在对飞控源码进行了深入的了解后,我们参考飞控自带固件ArduCopter,并利用Microsoft Visual Studio编写了自定义的垂直起降模式。
编程结束后,为了测试程序的正确性,对各项功能进行了单独的测试和参数的调整,包括固定翼模式、四旋翼模式和过度模式下对电机、舵机的控制。
2.2 实机部分功能测试
在初步的测试完成后,此时飞行器的原型机已经制作完成,我们计划进行下一步的实机地面测试。
在这里我们利用到了APM飞控的地面站软件Mission Planner。APM Planner 2.0是一个开源的地面站应用,可用于基于MAVlink的自动驾驶仪(包括APM和PX4/Pixhawk),可运行在Windows、Mac OSX还有Linux上。APM2可以让你配置飞机、飞行器、无人车,让它自动驾驶仪协同工作,使其成为自动驾驶载具。使用APM2可以校准与配置自动驾驶仪,计划与储存任务,还能查看飞行中的实时数据。
设置地面站端口波特率为115200,将APM飞控接上串行端口,并下载好已经编译好的垂直起降程序。
在地面站软件上设置我们写好程序的一些参数,然后将APM安装到实机上,在地面上测试其四旋翼状态的功能,以及旋翼的倾转功能。地面测试结果显示,飞行器在静态下,各项功能均正常。
2.3 实机验证飞行
接下来的实机验证飞行,我们测试了飞行器完成垂直起飞-切换-固定翼模式平飞-切换-垂直降落的全过程。
验证飞行结果显示,飞行器在模式转换过程中,飞行姿态控制较差,出现了失控坠落的情况。在经过了反复的实验,和对软硬件多次的改进后,飞行器最终可以完成预期的目标。
【参考文献】
[1]王岩.倾转四旋翼无人机垂直起降阶段控制系统研究[D].哈尔滨工业大学,2013.
[2]樊鹏辉,王新华,蔡开元.可垂直起降、高速前飞的飞行器设计与控制[J].控制理论与应用,2010,09:1171-1177.
[3]王冠林,武哲.垂直起降技术及其在无人机上的应用[J].飞航导弹,2006,06:20-25.
[4]王冠林,武哲.垂直起降无人机总体方案分析及控制策略综合研究[J].飞机设计,2006,03:25-30.
[5]胡镇.倾转定翼四旋翼无人机垂直起降控制系统设计[D].南京信息工程大学,2014.
[责任编辑:王伟平]
猜你喜欢
现代制造技术与装备(2021年1期)2021-03-23
航空模型(2017年1期)2017-08-15
航空模型(2016年12期)2017-04-18
百科探秘·航空航天(2016年5期)2016-11-07
航空模型(2016年3期)2016-05-14
航空模型(2016年3期)2016-05-14
百科探秘·航空航天(2015年5期)2015-12-01
百科探秘·航空航天(2015年12期)2015-11-07
百科探秘·航空航天(2015年11期)2015-11-07
百科探秘·航空航天(2015年6期)2015-11-07
