
浅谈无人机航空遥感系统在抢险救援中的应用
2016-10-10 09:53刘亚爽,朱毓杰,林芳芳
四川水力发电 2016年4期
刘 亚 爽, 朱 毓 杰, 林 芳 芳
(1.中国人民武装警察部队 水电第九支队,四川 成都 611130;2.中国人民武装警察部队 水电第三总队,四川 成都 611130)
浅谈无人机航空遥感系统在抢险救援中的应用
刘 亚 爽1,朱 毓 杰2,林 芳 芳2
(1.中国人民武装警察部队 水电第九支队,四川 成都611130;2.中国人民武装警察部队 水电第三总队,四川 成都611130)
重大自然灾害往往会造成灾区信息通讯中断、构筑物受损、河道堵塞等,因此,获取第一手灾情数据资料,对于现场感知、监测预警,制定及时的救援策略, 提高救援效率将起到至关重要的作用。无人机(UAV)作为一种新型侦测类工具,能够越过山川河流阻隔,对方圆百公里范围进行精确侦察,形成三维地理遥感影像,具有实时性强、机动灵活、影像分辨率高、成本低的特点, 且其能够在复杂地区进行作业。通过在“8.03”鲁甸牛栏江抢险中使用航空遥感以及在多次大型演习中执行航拍、航测任务的经验总结并查阅相应数据资料,对于山体裂缝扫描、滑坡预警等灾情判断和作业量计算,无人机航空遥感系统起到了无可替代的作用。
无人机;航空遥感系统;抢险救援;应用
我国地域广阔,地质、自然环境复杂,是灾害频发的国家之一。为了提高救援效率和质量,降低灾害损失程度,必须实施统一、高效、快速的应急救援指挥体系。而提高应急救援效率的关键因素是迅速、准确获取灾害发生后的第一手灾情信息。无人机航空遥感系统非常适合于各种自然灾害的应急救援,实现了危险区域的无人侦测,加快了灾情数据的收集,提高了指挥决策研判的准确性。笔者介绍了无人机航空遥感系统的组成,结合无人机航空遥感系统在鲁甸牛栏江堰塞湖排险、联训联演和“卫士-15”演习中的应用情况, 总结了其在应急抢险救援方面的作用。
1 无人机航空遥感系统的组成
无人机航空遥感系统主要由无人驾驶飞行器、飞行控制系统、稳定云台、任务传感器、无线通讯系统、数据处理与应用分析系统以及地面控制系统等几部分组成。
1.1无人驾驶飞行器(UAV)
无人驾驶飞行器由发动机、舵机、飞行控制单元、无线通讯单元、 GPS单元、惯性测量单元、云台等组成。根据飞行方式,可将其划分为直升机、固定翼无人机、旋翼无人机。通常,根据成像系统所需分辨率高低,以及低原、高原对飞行器的任务需要,固定翼的动力系统通常采取油动和电动两种方式。
以ZHAP-1油动固定翼无人机为例(图1),其性能参数如下:翼展为2 650 mm;机身长1 980 mm;机载设备最大重量为3.5 kg;最大起飞重量为16 kg;起飞速度为55 km/h;巡航速度为135 km/h;降落速度为48 km/h;失速速度为40 km/h;飞行时间为120~180 min。其飞行姿态稳定,载重量大,续航时间很长,可携带相机、吊舱以及飞控、电台等设备,抗风5~7级,抗中雨,可在高原地区飞行。

图1 ZHAP-1油动固定翼无人机
1.2飞行控制系统
飞行控制系统通过自动调参,智能适应飞行状态,智能检测飞行状态、高精度差分GPS定位实现飞行器自驾飞行。主要包括主控(MC)、惯性测量单元(IMU)、GPS、电子调速器和接收机等。
1.3无线通信系统
无线通信系统是无人机在作业和信息传输过程中不可缺少的一部分,通常采取电台以电磁波的形式进行飞机和地面控制系统的信息传输与全程控制。无人机无线通信系统主要搭载可见光相机、CCD摄像机、红外摄像机、超光谱成像仪、数字电台、数字图传及其它类型传感器。
1.4地面控制系统
地面控制系统采用GPS、IMU、MC获取位置、高度及航向等信息,通过电台和地面站进行实时数据交换以规划飞行任务和姿态校验(图2)。
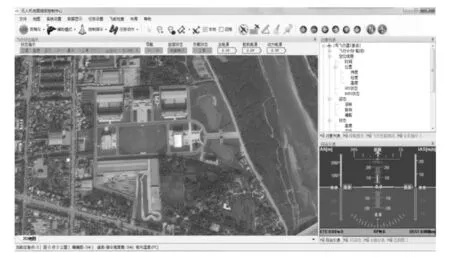
图2 YS09无人机地面指挥控制中心界面
1.5数据处理与应用分析系统
地面站软件在运行过程中会将地面站与自驾仪设备通过数据链路交互的通讯数据保存下来,其包含任务执行的时间、经纬度、航域、影像重叠率等信息。通过图像处理软件对含有POS数据的信息数据进行分析和处理。
2 无人机航空遥感系统在“8.03”鲁甸牛栏江堰塞湖抢险中的应用
2014年8月3日16时30分,在云南省昭通市鲁甸县(北纬27.1°,东经103.3°)发生6.5级地震,震源深度12 km,余震一千余次。地震引发了大量崩塌、滑坡、泥石流,牛栏江两岸山体同时滑坡,形成堰塞湖,导致下游一小型电站被埋,大部分国道、省道、乡村道路严重破坏, 给抢险救援工作造成难以想象的困难。
地震发生后, 我部携带固定翼和旋翼无人机迅速进入灾区,利用多旋翼无人机对两岸山体裂缝进行监测扫描, 利用T2P和F1P两架固定翼无人机对牛栏江堰塞湖周边20 km范围进行航空遥感测绘,形成了高分辨率遥感侦测图像并生成灾区数字高程三维模型,快速分析了河道损毁情况和堰塞体作业量评估,为指挥决策、兵力部署、战法研究、监测预警和泄洪槽的开挖作业起到了不可替代的作用(图3、4)。
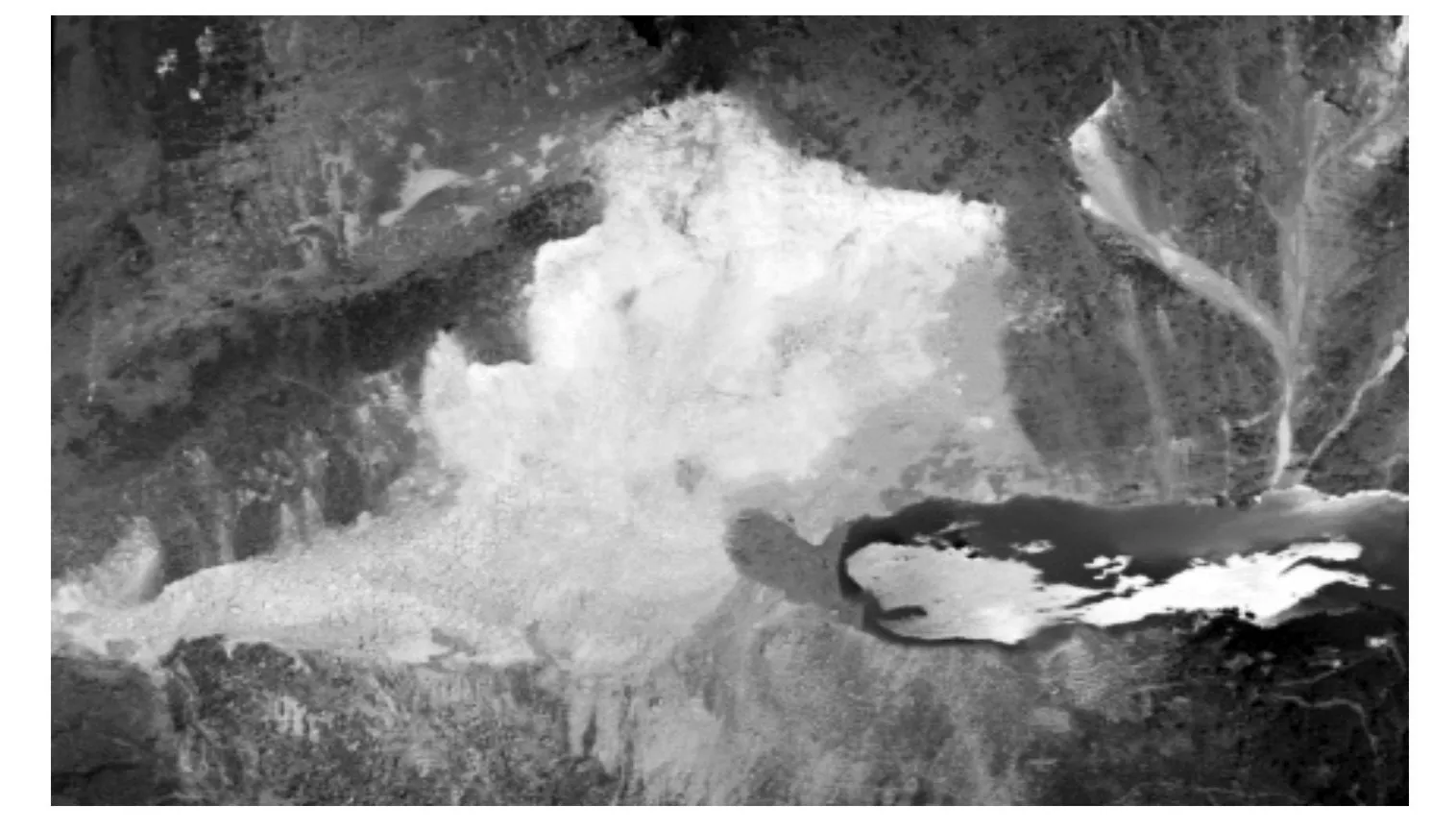
图3 牛栏江堰塞体航空遥感图
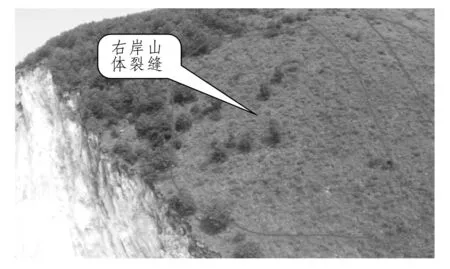
图4 右岸山体裂缝航拍图
3 无人机航空遥感系统在联训联演和“卫士-15”演练中的应用
2014年7月和2015年5月,我部组织了四川方向联训联演和“卫士-15”演习(图5、6),演习地点分别为四川省都江堰市崇义镇和西藏自治区日喀则拉洛乡,海拔分别为650 m和4 300 m。
为了在低原和高原两种情况下实现抢险救援远程侦测,收集地理信息数据,侦测组先后利用多架无人机对堤坝处置区、拉洛水利枢纽、定日至萨迦县国道和道路抢通路段进行了航拍、航测和实时传输,形成了高分辨率遥感侦测图像,推动了演习的顺利进行。
特别是在高海拔地区作业时,干扰无人机的因素很多,我们通过分析和总结,积累了很多在高寒地区遥感测绘的经验。
情况一:在两山夹一沟的地形下,风速快、变化大,无人机相对速度过低会导致飞机失速。经验总结:在海拔超过3 500 m时,特别是山谷地带,当风速超过4级时,巡航速度小于100 km/h的固定翼无人机不适合飞行,无人机应该避免在这种区域进行低空遥感,应选择风速较小的开阔地带和巡航速度≥100 km/h的固定翼无人机作业,爬升到制定高度后,再对目标区域进行航空测绘。

图5 堤坝损毁正摄投影图(都江堰架青桥)
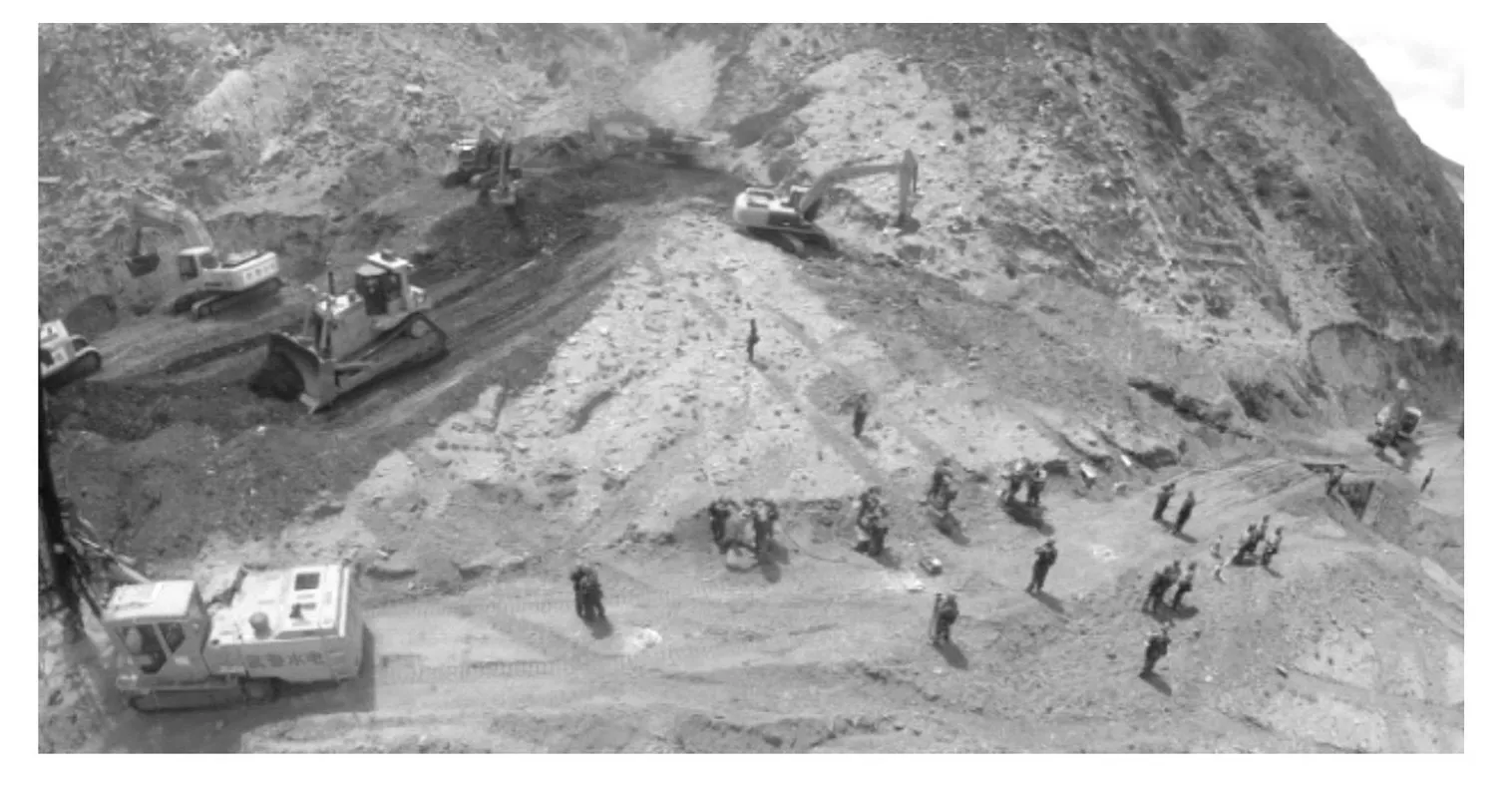
图6 “卫士-15”道路抢通(海拔4 300 m)
情况二:受海拔影响,空气密度较低,昼夜温差大,电池放电曲线下降,机载设备过重,电机kV值低会导致过载,瞬间电流超过峰值,致使无人机失控。经验总结:在海拔超过3 500 m的地区,电池应选用放电量大于25 C的高性能LI-PO电池,并配置相应高kV值的电机,计算整机荷载能力。根据伯努利原理,空气越稀薄,飞机转速低会导致上下翼面的相对静压力较小,无法依托机身所携带记载设备的重量;瞬间放电量大,会使电机超负荷运转,电池过热致使放电不均衡,飞控无法处理过载信号而导致飞控失灵。通常在高寒地区,应根据桨叶的尺寸和电机kV值计算出电机
所能提供的扭力,选择相应的机架和荷载重量。对于大于六轴的旋翼无人机电机kV值的选取应不小于400 rpm/V,应选择超过4 000行代码的高精度飞控,且做好电子设备的防寒、防潮与保暖。
4 结 语
通过多次实战和演习中对多种机型的无人机进行实践操作取得的经验,笔者得出以下结论:
无人机遥感监测系统的技术具有快速响应、低成本、获取数据信息高效准确、可对空中危险区域进行连续监测等优势,空中测量性能突出,是抢险救援的新型手段。尤其是近年来,随着信息化技术的飞速发展,无人机已能达到长航时、远距离、高精度的要求,地面遥控作业的方式,有效回避了常规空中测量在时间上、风险上、成本上的难题,弥补了卫星光学遥感和普通载人航空遥感受云层遮挡无法获取影像的缺陷。在人员往往无法到达或不能前往的危险区域,利用无人机航空遥感系统进行灾情调查与评估以及救援指挥,更显示出其具有的、独特的优势。
常规的灾情预警周期长,成本高,不利于抢险救援的实际需要,而无人机航空遥感系统作为卫星遥感和载人航空遥感的补充手段,在灾害应急抢险救援方面具有更广阔的发展空间和应用前景。
(责任编辑:李燕辉)
2016-07-21
X4;TV221.1;TV53+9
B
1001-2184(2016)04-0068-03
刘亚爽(1990-),男,四川成都人,助理工程师,学士,从事灾情侦测工作;
朱毓杰(1986-),男,吉林榆树人,工程师,学士,从事水利水电工程建设技术与管理工作;
林芳芳(1985-),女,安徽天长人,工程师,学士,从事水利水电工程施工技术与管理工作.
猜你喜欢
东方剑·消防救援(2022年7期)2022-07-16
东方剑·消防救援(2022年1期)2022-01-17
北京航空航天大学学报(2021年4期)2021-11-24
中国石油石化(2021年16期)2021-10-14
阅读与作文(小学高年级版)(2021年10期)2021-02-14
阅读与作文(小学高年级版)(2020年4期)2020-05-26
电子制作(2019年7期)2019-04-25
百花洲(2018年1期)2018-02-07
阅读与作文(小学高年级版)(2017年10期)2017-10-11
航空模型(2016年10期)2017-05-09
