探究基于视觉导航的变电站智能巡检机器人应用
2016-09-26 21:08刘林虎赵丽
卷宗 2016年7期
刘林虎 赵丽
摘 要:变电站作为电网枢纽必须进行定期巡视以确保其设备安全稳定运行,所以目前人类逐渐发明了基于视觉导航技术的智能机器人巡检技术,它取代了传统的人工巡检流程,为变电站日常运维节约了大量人力物力与财力。本文就将主要介绍这种智能巡检机器人的整体功能设计结构与视觉导航方案,证明其异于传统巡检技术的优越特性。
关键词:变电站;智能巡检机器人;视觉导航;功能设计;结构;方案
变电站智能巡检机器人配备了可见光CCD、红外热像仪、拾音器等检测型传感技术设备。它能够实现远程遥控自主运行模式,并满足24小时电力设备无人巡检条件,对电力设备中可能存在的异物悬挂、热缺陷等异常现象检测较为擅长。在这其中,智能巡检机器人作为导航工作核心,它的视觉导航技术对变电站发展具有现实意义。
1 智能巡检机器人的视觉导航结构功能组成及设计
(一)功能设计
智能巡检机器人通过定期巡检变电站设备来实现变电站正常运维,它的巡检目标主要是通过机器自身视觉、无线通讯与人工智能功能来实现自主规律性巡检,达到提高变电站巡检工作自动化程度与工作效率的目的。所以基于此原则,对机器人的功能性设计应该包括以下几点。
第一,要具备图像采集分析功能。由于搭载了多项检测设备,例如它的可见光CCD就能采集可见光图像,进而实现设备外观检查,发现设备的异物悬挂、锈蚀等异常现象。而红外热像仪也能记录设备开关闸刀与断路器的现场实际位置,包括油位计位置、表计读数等等。另外,红外热像仪对人工检测时设备的热缺陷捕捉非常灵敏,能够通过红外测温来明确设备温度是否异常。
第二,要具备无线传输功能。智能巡检机器人在采集视频信号与音频信号时必须首先进行智能预处理行为,并将采集信号传输给变电站监控管理中心。另外,机器人也会接收到来自于监控管理中心的各项控制命令,所以巡检机器人本体与后台监控中心是时刻保持无线通讯及传输功能状态的。
第三,要具备视觉导航定位功能。视觉导航定位也是本文探讨的重点。巡检机器人可以按照视觉导航预先规划好的轨迹行进,这也包括直行、停止、拐弯等动作。当机器人到达指定位置需要进行车身调节时,它就会实施可见光CCD旋转、红外线角度调节、电气仰俯角度调整等等动作,保持最佳设备拍摄位置[1]。
(二)结构组成
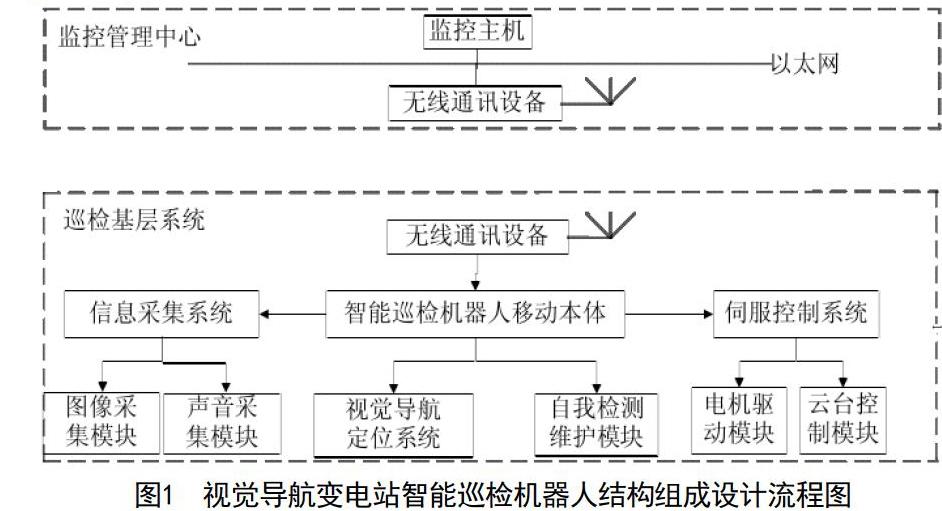
按照目前变电站的生产需求,智能巡检机器人在结构组成方面也要满足相应要求,搭建一套具有视觉导航体功能维度的智能化系统,让机器人能够按照该系统路径移动。在这套结构系统中,主要包含了可携带红外热像仪、可见光摄像机、断路器、拍摄主变等等一次设备。主要是对所采集到的图像实时分析处理,并同时监测异常状况,最后报警上传。具体来说,基于视觉导航的变电站巡检机器人组成结构设计图如图1。
如图1,基于视觉导航的变电站智能巡检机器人采用的是分层结构,在它内部包含了巡检基层系统与监控管理系统两大部分。技术操作人员首先会通过下发巡检任务来启动巡检机器人开始工作,由后台监控管理中心接收在巡检过程中所采集到的一切数据,并进行显示和处理。在这一点,后台主要通过模式识别与图像处理等技术来发现并修正设备缺陷,再次下发命令要求进行设备维护。另外就是巡检基层系统,该系统所指的就是巡检机器人本体,它通过无线通讯及监控设备来实现相互通信、数据远传等功能。而机器人本体也包含了伺服控制、信息采集、視觉导航定位与自我检测维护等等系统模块。以自我检测维护模块为例,机器人会在发生故障时进行自我简单处理,对局部部位或软件性错误进行自行复位,自行复位连续三次仍未解决问题机器人就会向后台中心报警,同时自动关机在原地等待技术人员前来维护支援[2]。
2 智能巡检机器人的视觉导航方案设计
现在绝大多数变电站在采用智能巡检机器人时都会基于循迹视觉导航方案来将巡检路线设置为轨线引导、路面区域分割以及路边线提取3个部分。首先说轨线引导,它是在预先规划好巡检机器人的情况下移动机器人,保持机器人按照视觉导航线路前行。而且轨线导航不需要任何参照物加入,可以让机器人简单快速的适应现有路面环境。
路边线提取,它所提取的是道路两旁的双边缘线,并计算求出双边缘线的交点,这里双边缘线的角平分线就是巡检机器人所要行进的路线。不过如果道路边缘不够明显或路段弧度过大也会对视觉导航功能产生一定影响。
最后是路面区域分割,它要求路面具有较高亮度,且采集图像应该集中于中央下半部分道路。采用该方法的优势就在于利用到了链码跟踪法,它可以将所采集图像分割成路与非路两部分,确保机器人始终在路中央活动。但考虑到由于路面亮度的限制,道路与非道路区很难被区分开来,所以它可能会影响到区域分割效果及导航参数计算精确性,因此稳定性不足也是该设计方案的一大缺陷。
依据上述设计方案可以见得,变电站路面所采用的是预设引导轨线,并通过视觉导航进行机器人循线运动控制的整体方案。在方案中,也包括了减速停车这样的定点检测设备,它能够辅助机器人进行巡检辅助标志加载,并通过收集巡检信息来实现信息有效巡检过程。再者,本方案为了配合跟踪引导线、提取路径信息并完成全部视觉导航工作,还为机器人配备了一套循迹摄像机,主要包括3台摄像机,它们能够实现对待检测设备图像可见光的采集,也同时能实现巡检功能和导航定位功能,确保机器人巡检工作的稳定高效性[3]。
3 总结
基于视觉导航方案的智能巡检机器人应用为变电站电气设备的安全稳定运行提供了有力技术支撑,满足了变电站对设备巡检的日常需求。特别是通过视觉传感设备来采集电气设备及其周围自然环境信息而实现视觉导航,也为接下来的巡检机器人视觉导航系统建设指明了方向。
参考文献
[1]赵坤.变电站智能巡检机器人视觉导航方法研究[D].华北电力大学(保定),2014.5-9.
[2]肖鹏,王海鹏,曹雷等.变电站智能巡检机器人云台控制系统设计[J].制造业自动化,2012,34(1):105-108.
[3]崔彦彬,刘欢.变电站智能巡检机器人系统的设计[J].现代制造技术与装备,2014(4):1-3.
猜你喜欢
好日子(2022年3期)2022-06-01
电子制作(2018年8期)2018-06-26
陕西画报(2018年6期)2018-02-25
电子制作(2017年8期)2017-06-05
商(2016年35期)2016-11-24
电脑知识与技术(2016年22期)2016-10-31
中国市场(2016年27期)2016-07-16
现代工业经济和信息化(2016年5期)2016-05-17
河南电力(2015年5期)2015-06-08
数码精品世界(2009年3期)2009-03-30