基于u-Blox GPS的工矿料场无人化车辆监控研究
2016-09-26 09:21:56黎雪芬
装备制造技术 2016年7期
黎雪芬
(无锡职业技术学院控制技术学院,江苏 无锡214121)
基于u-Blox GPS的工矿料场无人化车辆监控研究
黎雪芬
(无锡职业技术学院控制技术学院,江苏无锡214121)
结合煤矿、钢铁厂等大型料场管理的实际需求,进行了基于u-Blox GPS的料场进出车辆监控问题研究。设计了基于u-Blox GPS应用单元,研究了LEA-4H型GPS接收机模块的设置方法及PUBX00报文信息提取技术。结合料场监控需要,研究了栅格化地图标定、缩放、平移及行驶轨迹匹配技术。针对车辆是否进入料场的检测问题,提出了“同侧判断法”,实现了仅通过利用GPS位置信息来检测车辆是否在料场区域内。应用于某无人化料场车辆监控与管理系统中,表明本文研究的正确性和稳定性,为各类相关料场、车队等的监控与管理提供了一种行之有效的实现方案。
GPS;料场;监控;同侧判断法
在煤矿、钢铁厂等大型货物、材料堆积场(以下简称“料场”)中,保证作业中的堆料塔机吊车与进出车辆免于发生碰撞,保障货物的运输通畅,是料场管理的首要任务。其中,获得运输车辆的准确位置对料场与货料管理具有重要意义。而GPS(Global Positioning System,全球定位系统)接收机由于成本低、定位信息较准确,已在飞机、船舶、汽车等交通工具中得到大量应用。
本文基于新型u-Blox GPS接收机,结合料场管理的实际需要,对料场车辆监控管理进行研究。首先基于u-Blox GPS模块设计GPS应用单元,然后研究了GPS坐标转换方法并对精度进行了分析,在此基础上,基于GPS位置研究提出了车辆进出料场的检测方法。
1 u-Blox GPS应用单元设计
1.1u-Blox LEA-4H型GPS特点
GPS信号接收机是GPS导航卫星的用户设备,是实现GPS卫星导航定位的终端仪器。按用途分GPS接收机可分为授时型、测地型、导航型三种[1]。其中导航型接收机主要用于运动载体的导航,它可以实时给出载体的位置和速度。实时处理接收信号,定位精度为米级,价格便宜,应用广泛。
u-Blox是瑞士一家从事GPS接收机研究设计与生产制造的公司[2],其独有的ANTARIS技术GPS模块可以在天空视野有限的区域内提供动态条件下出色的导航性能,具有16通道路并行信道与8 192个搜索位,保证了快速的启动时间。此外,uBlox GPS模块具有低功耗与FixNow节电模式,适用于手持机及电池供电类设备。uBlox开发了LEA、TIM等多系列产品,其中LEA-4H型GPS接收机模块是L1频段C/A码16通道导航型接收机,其性能参数见表1.
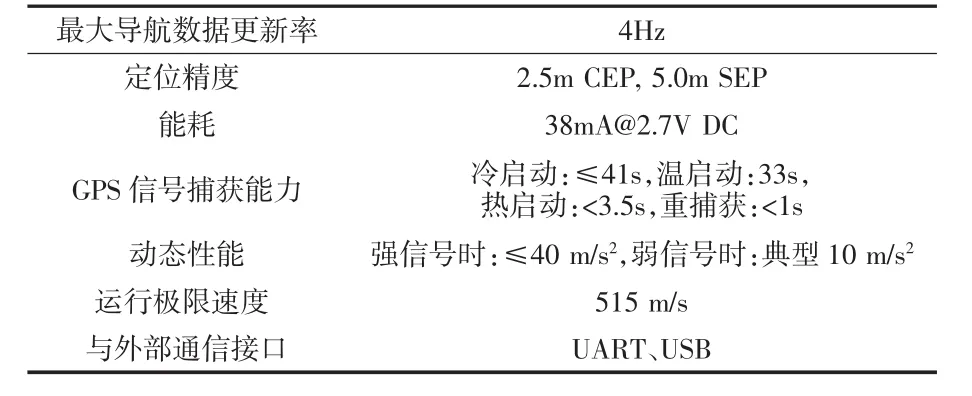
表1 LEA-4H型GPS信号接收机模块技术参数
由上表可知,该接收机具有能耗小、启动速度快、动态性能好的特点,并提供了串口与外部通信,可以方便地集成在其他电路系统中。工作温度范围为-40~85℃,圆误差概率定位精度优于2.5 m,适于工业应用。因此在本文中选用该型GPS模块进行应用研究。
1.2硬件设计
LEA-4H型GPS模块仅需要为模块提供电源并接入GPS天线,即可通过USB或UART接口与外部设备进行通信,输出定位信息。
然而为了获得车辆的定位信息,还必须采用无线数字传输模块,将相关信息传输到管理中心。ZigBee是一种新兴的短距离、低功耗、低数据速率、低成本、低复杂度的无线网络技术[3]。它的传输速率为10 kB/s~250 kB/s,在低功耗待机模式下,两节普通5号电池可使用6~24个月。ZigBee无线通信网络可以是星形、网状型、簇状形、树形和MESH网状网等任意网络拓扑结构。通过相邻节点路由,可以通过“多级跳”的方式来通信,具有自组织、自愈能力强、通信可靠的特点。由上述分析可见,ZigBee无线通信非常适于本文料场监控管理的需要,因此本文采用了基于Zigbee技术的SZ05型无线数字传输模块。
根据以上研究,本方提出了如图1所示的GPS无线应用单元硬件设计方案。该方案中,MCU通过UART对GPS模块和ZigBee无线数字传输模块进行设置,对GPS定位信息进行解析提取,并将信息通过另一UART通过无线传输模块发送出去。

图1 GPS应用单元硬件组成方案
1.3LEA-4H型GPS模块设置方法
理论上使用该GPS接收机时不需要设计接口电路即可直接将信号输出。其输出信号协议遵从NMEA0183协议[4]。与本文所使用的GPS模块有关的NMEA0183标准协议有GPGGA等十种。
在实际应用中,由于该接收机模块冷启动后进入缺省设置状态,以9.6 kbps的波特率以1 Hz输出GGA、GLL、GSA、GSV、RMC、VTG、ZDA等协议数据,这将带来四个问题:(1)信息更新率仅1 Hz,需通过软件将其更新率设至4 Hz,以充分发挥其优势;(2)输出的8种协议,每次传输多达560余字节,其内容涉及授时、位置、星数、精度、定位状态、卫星信息、速度、航向、测距残差、伪距误差、提示信息等,且各协议内容有较多交叠重复,有些是与实际应用无关的;(3)在4 Hz数据更新率的情况下,每秒应传送的数据超过2 240字节,超过默认的波特率下的通信带宽,造成数据丢失;(4)按照默认设置,MCU将要处理大量的冗余信息,造成资源浪费,并影响定位信号数据传输的实时性。
事实上,u-Blox公司开发了PUBX00等专属的NMEA协议,其信息内容包括经度、纬度、海拔、地速、航向、定位状态等,方便用户使用。
根据该情况,并针对上述问题,LEA-4H模块上电之后应对其进行初始化设置,其步骤如下:
(1)将MCU的UART0的波特率设置为9 600 bps,使之与GPS模块的缺省波特率一致;
(2)依次输入相关指令以禁止以下七种默认的输出协议:ZDA、GSV、RMC、VTG、GGA、GSV、GLL,在每条指令输入完成后各延时0.2 s以等待指令生效;
(3)输入指令以允许PUBX00协议输出,并延时2 s以待指令生效;
(4)输入指令以更改GPS模块的接口波特率至38 400 bps,延时2 s以待指令生效;
(5)将MCU的UART0的波特率设置为38 400 bps,与GPS模块波特率一致;
(6)输入指令以设置GPS输出数据更新率和导航频率为4 Hz,延时1 s以待指令生效;
经过以上步骤,即按要求完成了GPS模块配置,然后可进入正常的处理流程。其中第2、3、4、6步中各指令如表2所示。
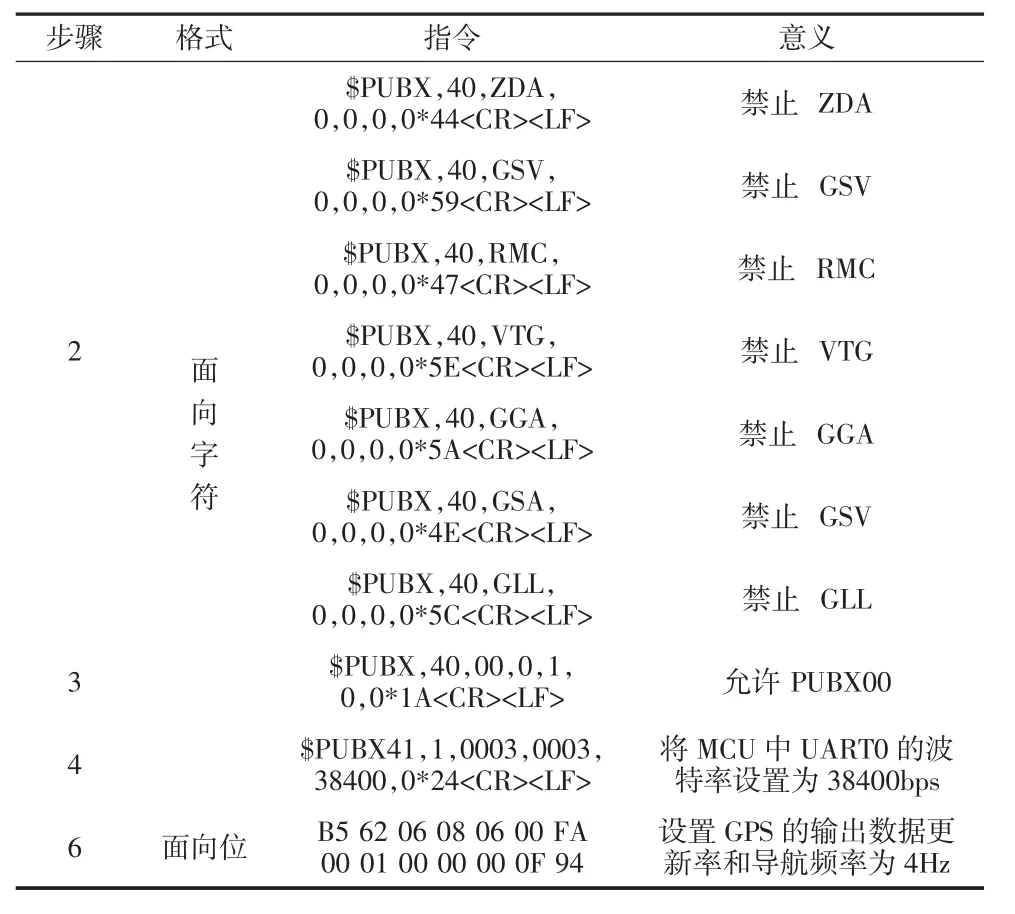
表2 GPS设置指令
1.4PUBX00协议报文数据提取方法
通过对LEA-4H设置后,GPS模块将以4 Hz的更新频率输出PUBX00协议。PUBX00协议其格式为:
$PUBX,00,hhmmss.ss,Latitude,N,Longitude,E,AltRef,NavStat,Hacc,Vacc,SOG,COG,Vvel,ageC,HDOP,VDOP,TDOP,GU,RU,DR,*cs<CR><LF>
该协议包含信息较多,而实际上大多数用户所关心的定位信息较为有限,若能将所关心的协议中的有关信息预先提取出来,组成一个精简的定制协议,即可进一步降低串行通信和无线数字传输模块的数据吞吐量,提高可靠性。
MCU软件中,为处理接收PUBX00协议报文,首先应开辟一个足够大(如128Byte)的接收缓冲区GPSBuffer,然后在UART接收中断服务程序中从’$’开始接收字符,依次放入GPSBuffer,直接接收到帧尾<CR>或<LF>,此时将接收完成标志gps_frame_over置位。
在主循环中查询如果gps_frame_over被置位,则调用相关函数进行GPS报文数据提取,执行完该函数后将gps_frame_over复位。
其中报文数据提取函数的设计思路如下:
(1)进行校验,以确保所接收到的数据的正确性与完备性。
(2)根据面向字符型协议的特点,以逗号为序,依次提取出相关的字符串,并按所设计的GPS精简协议转换成指定格式的数值。
(3)如果转换完成,则将上述数值编制成GPS精简协议,并启动发送。
通过以上方法,所关心的车辆GPS信息以4Hz的频率通过无线数据传输模块发送到监控中心[5]。
2 栅格化地图技术
为了反应出车辆行驶过程中与地面的位置关系,在监控中心必须采用地图技术。目前市场上已经出现了各种矢量化数字地图软件,在应用中存在着以下不足:(1)软件开放性差,不适于集成在监控中心内;(2)地图更新慢,很多道路、建筑等与实际情况并不对应;(3)地图比例尺度过大而失之于粗略,不能反应车辆行行驶范围内的详细情况。为此,本文研究了一种栅格化地图技术,可将普通的地图图片扫描形成栅格文件后,通过对其进行标定,再配合GPS定位数据以实时反应车辆与地面的真实位置关系。
2.1地图标定
地图标定的目的是建立起与GPS位置的对应关系,具体而言要包括:1)确定图形中某一像素点(通常是地图中心像素点)对应的经纬度坐标;2)确定地图的比例关系,即地图上每动一个像素,对应的经纬度的增减量。
可通过确定地图上斜对角上的两个点实现地图的标定。设地图分辨率为xM×yM,图上两个像素p1 (x1,y1)、p2(x2,y2)对应的经纬度值分别为p1(λ1,φ1)、p2(λ2,φ2),图形设备坐标系odxdyd原点为图形的左上点,xd向左为正,yd向下为正,则有

地图中心点的经纬度有:

地图标定好之后,将式(1)、(2)所得四个数值写入特定文件,以供程序调用。
由于地球平面是三维椭球面,而地图是二维平面,因而任何二维地图均不可避免存在变形误差,导致车辆实际位置与地图上显示的位置有偏移。应用上述方法标定后四个角点最大经度误差为:

以料场车辆范围300 km×300 km、地图中心点位于北纬31°的上海市郊为例推算,可得经度最大误差为2.257 8e-9°,转换后得最大距离误差为0.252 m.该误差小于GPS定位精度,在应用中略去不计。
2.2地图缩放与平移
为实现地图的平移和缩放,定义缩放系数Cz、左右偏移量△x、上下偏移量△y.其中Cz初值为1,△x与△y初值均为0.
当△x与(或)△y变化时,按式(5)更新地图的左上角点在以窗口左上角点为坐标原点的窗口坐标系(Y轴向下为正)中的位置值Lx,Ly以及地图欲平铺的范围xD,yD;当Cz变化时则依次按式(4)、式(5)计算更新相关参数,即可显示缩放和平移后的图形。
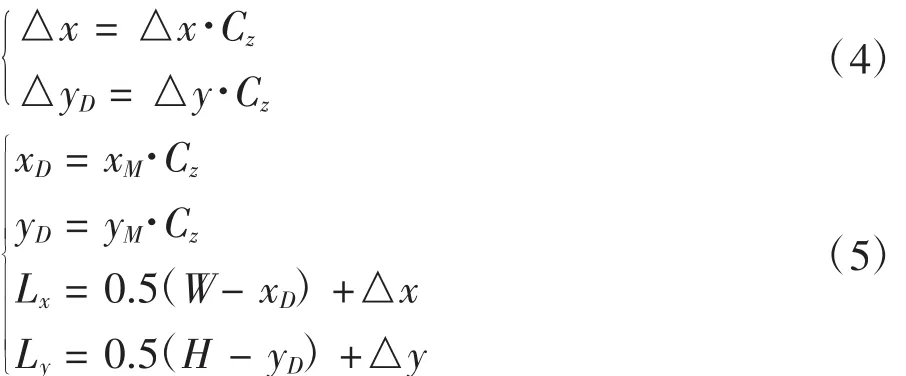
式(5)中W、H表示地图显示窗口的宽与高的像素值。
2.3轨迹匹配与显示
在地图缩放与平移后,为了使车辆行驶轨迹与地面匹配,应按式(6)进行变换,为将车辆某时刻经纬位置(λi,φi)转化为窗口坐标系下的像素位置(xi,yi).

值得注意的是,式中yi的计算中并不需要考虑南北半球而产生的正负号问题,这是由于式(1)中sφ的算式已经自动带入了符号。这样依时间顺序绘制出各车辆的位置连线,即可形成与地图实际位置相对应的动态行驶轨迹。
3 基于GPS的出入料场检测方法
料场管理中重要的一项是对进入料场车辆进行重点监控以保证安全,而如何在不使用其他附属手段的条件下,仅使用车辆GPS位置信息检测车辆是否进入料场是其中的关键问题。
通常料场轮廓形状较为规则,一般为矩形。如图2所示,考虑由逆时针顶点P1,P2……Pn的凸多边形料场,移动点M为车辆,则问题归结为如何判断M在凸多边形内部。

图2 进出凸多边形料场检测方法
通过研究,本文提出了“同侧判断法”。在图2中,如果车辆在凸多边形内部,车辆始终位于沿凸多边形逆时针顶点所构成的各边的左侧(如顶点按顺时针顺序排列,则在右侧)。设M点坐标为(x,y),则M到顶点Pk-1(xk-1,yk-1)与Pk(xk,yk)的距离d有:

值得注意的是,式(7)中侧距离d是有符号的量,从上一顶点Pk-1向下一顶点Pk方向看,若当前位置M位于任务轨迹的左侧,则d为正值,反之为负值。
因此,检测M点在凸多边形内部的“同侧判断法”可以简单地归纳为:M点到各边的距离均为正或均为负时,表明M点在凸多边形内部,否则在外部。
对于非凸多边形区域,可将其划分为2个或多个凸多边形区域再分别进行判断,如图3所示。只要在其中一个凸多边形区域即可确认。

图3 非凸多边形可以划分成多个凸多边形
通过上述方法,仅通过利用已有的GPS位置信息,即可检测车辆是否在料场区域内。
4 应用
本文研究成果在某铁矿石无人化料场得到应用。该料场包括两个不连通的南北两个区域。每个料场中间是塔机吊车的轨道。当车辆进入料场时,装在各车辆上的GPS应用单元向监控中心传输定位信号,监控中心对位置进行监测以防止与吊车发生碰撞,实现对无人化料场的监控与管理。该系统还可以扩展到货料运输监控管理中。
该料场车辆监控系统人机界面如图4所示。该界面主要包含2个部分,即串口通信区与料场地图与车辆显示区。

图4 某铁矿石料场车辆监控系统
串口通信区位地界面左侧,用户可以选择串行通信的端口号及其波特率并建立连接,在提示框中依次显示最新的若干条提示信息和命令,还可以通过手动发送自定义信息经数字传输模块传送到相关车辆终端。
料场地图与车辆显示区中显示地图与车辆位置,可选择是否显示各车辆的行驶轨迹。可使用工具栏中的上、下、左、右、放大、缩小、恢复等按钮对地图进行相关操作;在行驶轨迹重叠不分时,可点击工具栏中的橡皮擦按钮以清除此前的轨迹。
所设计的GPS应用单元和料场监控系统运行可靠,表明了本文研究的正确性和稳定性。
5 结束语
本文结合大型料场进出车辆管理需要,研究了基于u-Blox GPS的料场车辆监控问题。在分析u-Blox GPS接收机特点的基础上,设计了GPS应用单元的硬件,并研究了LEA-4H型GPS接收机模块的设置方法和GPS报文信息提取技术。根据料场地图显示需要,研究了栅格化地图的标定、缩放、平移及地图与车辆轨迹匹配技术。提出了“同侧判断法”,实现了仅通过利用GPS位置信息,即可检测车辆是否在料场区域内。本文研究成果在某无人化料场车辆监控与管理系统中,可靠运行多年,表明了本文研究的正确性和稳定性,为各类相关料场、车队等的监控与管理系统的设计提供了有益参考。
[1]龚真春.GPS在微型无人机导航定位中的研究与应用[D].杭州:浙江大学,2005.
[2]瞿雷,刘盛德,胡咸斌.《ZigBee技术及应用》[M].北京:北京航空航天大学出版社,2007:6.
[3]Klaus Betke.NMEA 0183[Z].2001.
[4]u-Blox公司.ANTARIS Protocol Specification[Z].2007.
Research on Unmanned Vehicle Monitoring System based on GPS u-Blox in Industrial and Mining Area
LI Xue-feng
(Control and Technology College,Wuxi Institute of Technology,Wuxi Jiangsu 214121,China)
For the vehicle manage require of the large materials yard,this paper research the monitor problem based on u-Blox GPS.Design the GPS applicable unit,research the setting method of LEA-4H and the extract skill of GPS protocol data.Research the grid-based map technology to mark,zoom,translation the map and match the vehicle track.Propose the“same side judgment”to check the vehicle whether in the yard only by GPS location. The correctness and stability of the research result are proved by the reliable operation of a unmanned iron ore yard vehicle system for years.The research providegood reference for the design of the monitor and manage system in other material yard and fleet.
GPS;material yard;monitor;same side judgment
TP391.4
A
1672-545X(2016)07-0166-05
2016-04-09
黎雪芬(1979-),女,江西丰城人,硕士,讲师,从事自动化控制方面教学与研究工作。
猜你喜欢
昆钢科技(2022年4期)2022-12-30 11:24:04
山东冶金(2022年1期)2022-04-19 13:40:44
湖南水利水电(2021年6期)2022-01-18 06:07:16
智能制造(2020年5期)2020-07-03 06:24:00
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
电子测试(2018年7期)2018-05-16 06:27:18
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
中国工程咨询(2014年10期)2014-02-16 06:17:30