永磁同步电机矢量控制中的坐标变换和解耦
2016-09-26 09:21:50龚寄,骆拓
装备制造技术 2016年7期
龚 寄,骆 拓
(1.湖南涉外经济学院机械工程学院,湖南 长沙410205;2.长沙矿冶研究院,湖南 长沙410012)
永磁同步电机矢量控制中的坐标变换和解耦
龚寄1,骆拓2
(1.湖南涉外经济学院机械工程学院,湖南 长沙410205;2.长沙矿冶研究院,湖南 长沙410012)
针对永磁同步电机矢量控制中的线性解耦要求,用矩阵理论方法求出几种形式的绕组电感矩阵变换时的模态矩阵,导出坐标变换矩阵,从而使定子磁链方程解耦。并给出了功率不变原则下坐标变换时的电磁转矩方程,为深刻理解永磁同步电机矢量控制的坐标变换理论提供了有益的借鉴和启发。
永磁同步电机;坐标变换;解耦
在研究永磁同步电机矢量控制时,广泛使用到坐标变换。通过坐标变换,可以把定子的电感矩阵对角化、常数化,从而使定子的磁链方程解耦,电磁转矩方程得到简化,使交流电机象直流电机一样容易控制[1]。通常坐标变换是从Blondel的双反应理论、从物理概念出发推导出来的[2],那么从数学上坐标变换是如何导出的?这也是电机控制工程技术人员关心和困惑的问题。
1 永磁同步电机在A、B、C三相坐标系下的数学模型
在建立永磁同步电机的数学模型之前,先做如下假设:
(1)忽略磁路饱和、磁滞和涡流的影响,视电机的磁路是线性的;
(2)电机的定子绕组三相对称,各绕组轴线在空间上互差120°电角度;
(3)转子上没有阻尼绕组,永磁体没有阻尼作用;
(4)电机定子电势按正弦规律变化,定子电流在气隙中只产生正弦分布磁势,忽略磁路中的高次谐波磁势。
按以上假设对被控对象永磁同步电机进行理论分析时,其所得的结果和实际情况十分接近,误差在工程允许的范围内。
在A、B、C三相坐标系下,永磁同步电机的物理模型如图1所示,图中将定子三相绕组中A相绕组轴线作为空间坐标系的参考轴线OA,在确定好磁链和电流正方向后,可得到永磁同步电机在A、B、C坐标系下的定子电压、电流和磁链方程分别如下[3]:

图1 永磁同步电机物理模型
电压方程:

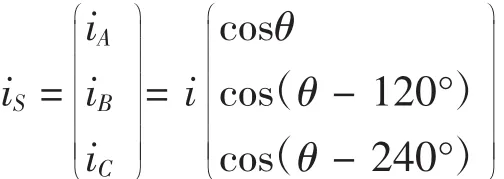
电流方程:
磁链方程:
ψ=LiS+ψS其中:

式中:ψf为转子永磁体磁极的励磁磁链,方向为d轴正向;
θ为转子d轴超前定子A相绕组轴线A的瞬时电角度,θ=ωt+φ,ω=dθ/dt,φ为初始电角度;
MXY=MYX为定子绕组的互感系数;
从上面的磁链方程的电感矩阵可知,各绕组间存在非线性耦合,而且还和转子的旋转角度有关,为了实现解耦,需要对定子电感矩阵对角化。
2 永磁同步电机在α、β、o三相坐标系下的数学模型
由于定子绕组三相对称,有LA=LB=LC=Lss,MXY=MYX=Lm,定子绕组的电感矩阵可写成:的特征根:λ1=λ2=Lss-Lm,λ3=Lss+2Lm.因此,对角化后,有:
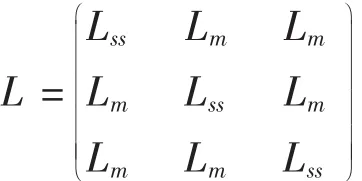
要将矩阵L对角化,先求

(1)λ1=λ2=Lss-Lm时

矩阵L-λiE的秩为1,根据(L-λiE)X=0,有x1+x2+x3=0
得到基础解系的解之一:

现进行正交化,令

最后单位化,有
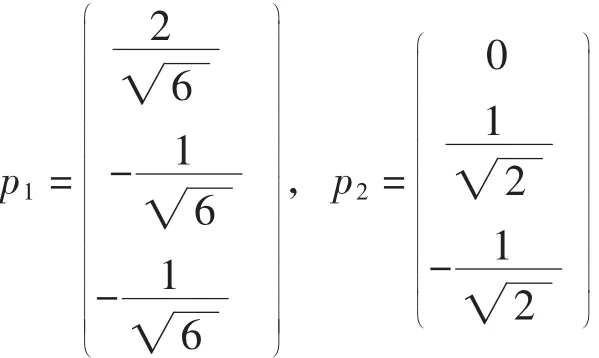
(2)λ3=Lss+2Lm时

矩阵L-λiE的秩为2,根据(L-λiE)X=0,有x1=x2=x3

综合三个单位向量,有
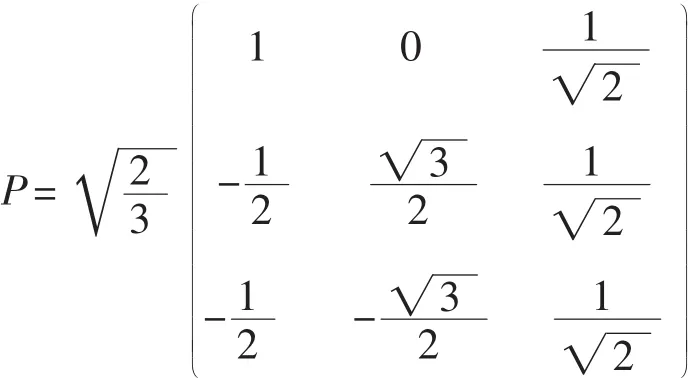

由于电机绕组为星形接法,且没有中心线,即iA+iB+iC=0,即i0=0,第三式可不考虑。仅前两式有意义,定子的静止三相电流iA、iB、iC经过三坐标到二坐标的变换,可得到定子的静止二相电流iα、iβ,如图2(b)所示。
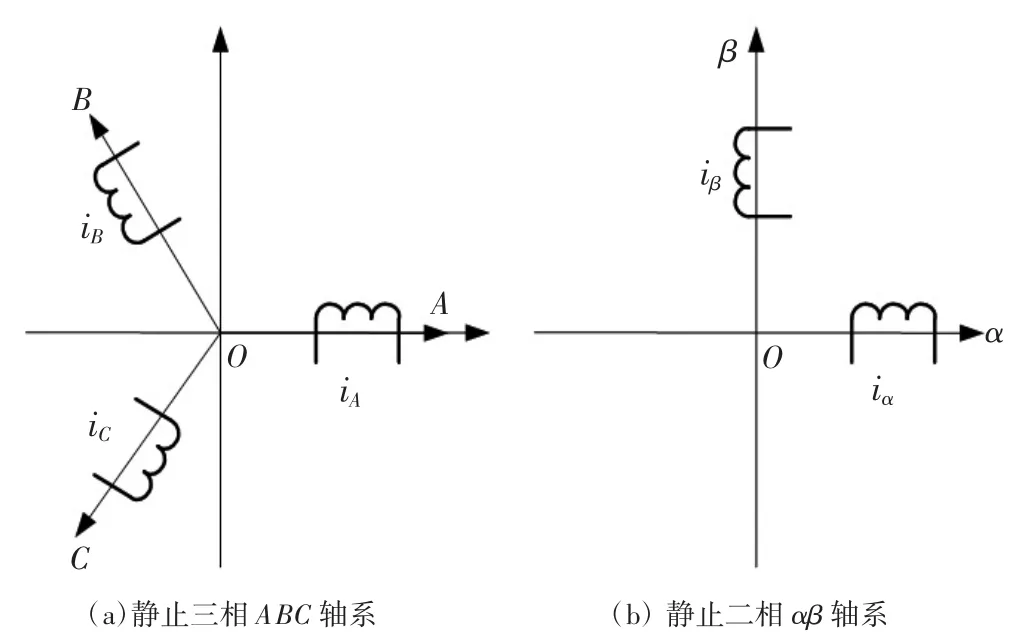
图2 静止三相ABC轴系到静止二相αβ轴系的变换
3 永磁同步电机在d、q、o三相坐标系下的数学模型
当电机旋转时,定、转子绕组之间产生旋转的耦合关系。这时定、转子间互感矩阵内含有定、转子绕组夹角的元素,即带有三角函数非线性,且随时间变化,一般写成
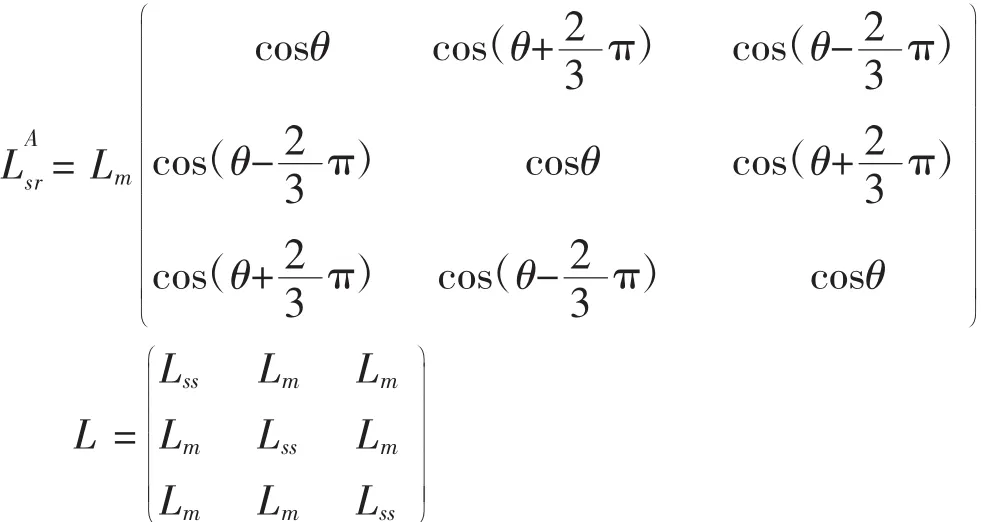

表1 定、转子间互感矩阵的特征根、酉交特征矢和单位化特征矢
从而有酉交变换矩阵如下:

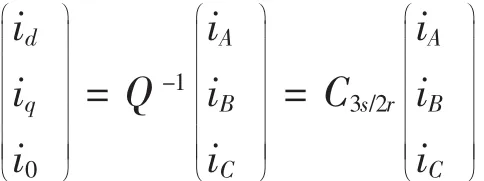

因此有
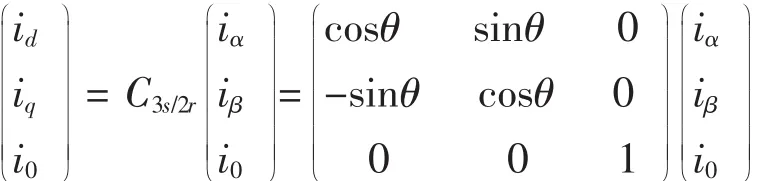
从上式中可得到

可见这是二坐标旋转变换,也即将静止的二轴坐标iα和iβ经旋转变换成为旋转的二轴坐标id和iq,从而实现了由ABC三相静止坐标系的三相电流到dq同步旋转坐标系的二相电流的变换。如图3所示。

图3 ABC三相静止坐标系到dq二相同步旋转坐标系的变换
4 结束语
本文讨论了永磁同步电机矢量控制中的坐标变换与解耦问题,通过坐标变换,把定子的电感矩阵对角化、常数化,从而使定子的磁链方程解耦,并使电磁转矩方程得到简化,使交流电机象直流电机一样容易控制。与从物理概念出发推导不同的是,文中从数学上推导了坐标变换与解耦,给出了功率不变原则下坐标变换时电磁转矩方程,为深刻理解交流电机坐标变换理论提供了有益的借鉴和启发。
[1]陈坚.交流电机数学模型及调速系统[M].北京:国防工业出版杜,1989.
[2]R.Krishnan.Permanent Magnet Synchronous and Brushless DC Motor Drives[M].CRC Press,2009.
[3]Paul C.Krause.Analysis of Electric Machinery and Drive Systems[M].Wiley-IEEE Press,2002.
[4]同济大学数学系.工程数学:线性代数[M].北京:高等教育出皈社,2007.
Transformation Between Reference Frames and Decoupling of PMSM with Vector Control
GONG Ji1,LUO Tuo2
(1.Mechanical Engineering College,Hunan International Economics University,Changsha Hunan 410205,China;2.Changsha Research Institute Of Mining and Metallurgy,Changsha Hunan 410012,China)
To meet the requirements of linear decoupling of vector control for permanent magnet synchronous motor (PMSM),this paper gives a matrix method of transformation between reference frames by solving the diagonal matrix of the stator winding inductance matrix,derives the coordinate transformation matrix and the decoupling stator flux equation.The electromagnetic torque equation is presented with the transformation under power constant. It is helpful and inspiring for understanding of the coordinate transformation theory of PMSM vector control.
permanent magnet synchronous motor;reference frames;decoupling
TM92
A
1672-545X(2016)07-0152-03
2016-04-14
本文得到湖南省教育厅项目资助(编号:14C0649)
龚寄(1976-),女,湖南澧县人,硕士,讲师,研究方向:主要从事机电系统建模与控制的研究及教学。
猜你喜欢
防爆电机(2020年6期)2020-12-14 07:16:54
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
光学精密工程(2016年3期)2016-11-07 09:03:49
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年23期)2014-04-04 12:08:30
电测与仪表(2014年14期)2014-04-04 11:53:30