基于AIS实时测量雷达性能的多雷达数据融合
2016-09-20 05:46石子烨焦秀珍中国电子科学研究院北京100041
现代计算机 2016年18期
石子烨,焦秀珍(中国电子科学研究院,北京 100041)
基于AIS实时测量雷达性能的多雷达数据融合
石子烨,焦秀珍
(中国电子科学研究院,北京100041)
0 引言
雷达和AIS是两类探测海上目标信息的重要传感器,雷达可以主动探测和跟踪目标,探测海域内全方位的信息(包括探测范围内所有可见目标的信息),可以探测到目标的距离、方位,并可反映出目标的大小和形状。雷达可对目标进行编匹,作为目标未消批前的唯一标识,但雷达存在探测盲区,且探测信息精度较低,易受气象、海况的影响,易丢失跟踪目标[1]。为提高雷达探测精度的可信度就必须多次重复测量,但测试方法因各类管制因素的限制,需要后勤保障配合,且测试费用高、测试周期长,技术实施难度高,对后续实验及训练任务有影响。此外,一旦测定雷达的探测精度就是一个定值,未考虑雷达精度因为时间、气象、海杂波、目标距离远近及雷达探测角度导致的测量精度变化[6]。例如,风向是影响海杂波强度的重要因素,海杂波在逆风时最强,顺风时次之,侧风时最弱。研究表明,因海杂波的影响,雷达的探测性能可下降50%,因此实时测量雷达的探测精度可有效提高雷达的可信度[7]。
船舶自动识别系统AIS(Automatic Identification System)可发送静态信息、动态信息、航次信息以及安全信息。由于其探测精度受到距离、天气、海况等外界环境影响较小,目标实时位置的精度较高,当目标密集时不会造成目标误跟踪,也不会因天气及海杂波的影响造成目标丢失。但缺点在于只能接收配备AIS设备的目标发送的信息,对于未配备AIS设备的目标(例如敌方目标)则存在探测盲区[1]。
雷达与AIS探测系统既具有各自优势,又具有局限性,可采取数据融合的方式提高探测航迹质量。两者的数据融合属于多传感器数据融合的一部分,但AIS对目标存在探测盲区时,可采用AIS实时测定雷达精度,提高多雷达数据融合的质量。基于AIS测定雷达精度的思想提出了多雷达数据实时融合的模型框架和实现思路,利用AIS探测精度高的特点,对雷达性能进行分析,实时修正融合权重,从而提高雷达融合数据的精度。
1 融合模型
多传感器间的位置信息融合,可期望得到比单个传感器高精度的位置信息,实现对目标的精确定位。雷达和AIS数据融合的系统结构示意图1如图所示。各个传感器探测到数据后进行数据处理后产生目标位置航迹,发送到数据处理中心统一处理,包括数据预处理,时间对齐,航迹关联和点迹合并,最后输出融合后的数据。
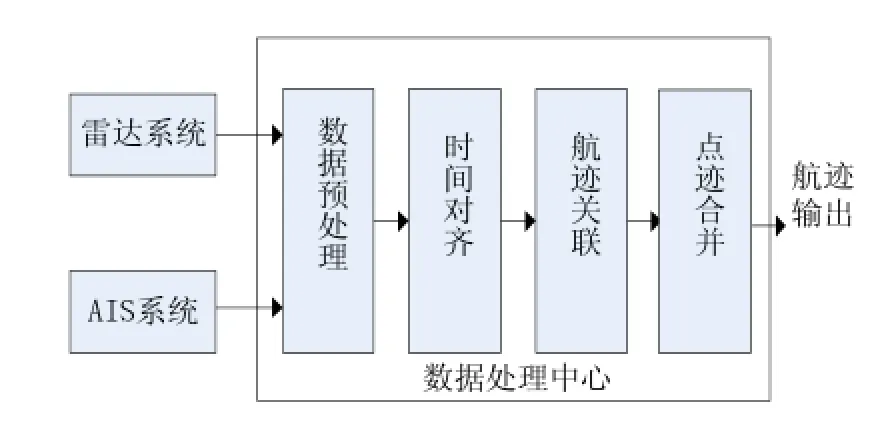
图1 雷达和AIS数据融合的系统结构示意图
2 融合模型
当雷达和AIS传感器的数据各自形成航迹,融合中心需要根据相应的融合准则判断出两个传感器形成的航迹是否为同一目标,如果是同一目标则进行航迹融合。由于AIS探测精度较高,当形成融合航迹的传感器包括AIS时,可直接采用AIS的探测航迹作为融合航迹,并对雷达的探测精度进行实时评估;当形成融合航迹的传感器仅包括雷达时,可用实时评估的雷达性能来修正雷达间的融合权重,从而得到更精确的航迹。
探测性能σ是由量测不完全性带来的误差,传统的雷达性能评估为一定值,即通过采用高精度雷达或GPS作为对比真值,寻找两者探测同一目标航迹进行关联,统计对比两者之差ΔT,通过ΔT的均方差评估雷达的探测性能σ[4],即当有T条关联航迹时,σ为:

但由于未考虑雷达因为时间、气象和海杂波引起的性能变化,我们考虑用AIS来测量雷达的实时误差,将误差表示为时刻t的函数[5]。由于在很短的一段时间、同一探测海域内,雷达误差变化较小,我们将AIS获得的实时位置信息作为真值数据,寻找同一探测海域内AIS与雷达探测同一目标的相关航迹,将与AIS探测航迹关联上的雷达数据进行对比,统计计算两者在最近连续一段时间内位置误差。最近一段时间可取一个固定的时间窗,也可根据数据报送频率决定。若在距离时刻t最近一个时间窗内关联上的探测数据为M条,利用AIS与雷达探测轨迹距离差的均方差σt来评估时刻t雷达的探测性能,计算公式如下:

当AIS传输有延时,可通过对雷达数据缓存,采用数据中心最新接收AIS的M条数据,并通过AIS和对应最近时刻雷达的目标位置信息的关联算法对上式进行计算。例如在图2中,AIS传输有延时,我们在t时刻进行误差对比时,仍采用缓存中雷达采样时间为t-3 至t-2时刻的数据与AIS采样时间为t-3至t-2时刻的数据进行对比。当雷达传输有延时也采取相同的策略。

图2 AIS和雷达数据采样时刻和到达时刻示意图
当探测目标不携带AIS相关设备,仅存在雷达探测的航迹,可采用基于AIS实时测定精度的雷达探测航迹加权融合算法。设雷达组的编号为{1,2,…,m},雷达组在t时刻测量的点迹为,,},实时测量的均方误差为,航迹加权因子为},其在时刻t的航迹融合值为Xt,它们满足如下约束条件:

若雷达间误差不相关,则融合航迹在时刻t的均方误差为:


3 相关算法及流程
融合模型所涉及的算法主要包括坐标转换、时间对齐、航迹关联、航迹加权和航迹管理等。
3.1坐标转换
AIS发送的位置信息是基于经纬高坐标系,即用三维球面来标识位置,以北极或南极为极点,以经纬线为坐标线的坐标系。而雷达探测目标信息往往采用极坐标系,一般以雷达天线的中心为极点,确定目标位置所需的探测值主要包括距离 (目标与雷达间的直线距离)和角度(目标与雷达角度间的连线在水平面上的投影和基准方位间的夹角)[2]。由于需要对雷达和AIS的信息进行航迹对比关联,因此需要把两者的坐标转到同一坐标系下。
3.2时间对齐
因为不同的传感器采样频率不同 (即使同类型的雷达扫描周期也会因工作状态不同而改变),航迹形成的起始时间也存在差别,故存在观测数据时间不同步的问题。为了下一步的航迹关联,需要将不同传感器的探测信息统一到同一时间。时间对齐可采用航迹外推或内插的方法,对采样率较高的航迹内推或外插,得到需要时间节点的数据。经过时间对齐后,数据可能会引入一定的随机误差,所以在进行航迹关联时,要设波门进行航迹相关判断。
3.3航迹关联
3.4航迹加权融合
由于AIS的探测精度较高,当AIS和雷达关联后,可直接采用AIS的探测航迹作为融合航迹。当目标不存在对应的AIS值时,可采用AIS的探测数据测定雷达的探测精度,对雷达性能进行评估。
3.6航迹管理
航迹管理主要包括航迹编号管理和航迹质量管理。航迹编号管理主要包括航迹申请、航迹撤销、航迹保持等。在数据处理中心,每一条航迹都有唯一的一个航迹编号与之对应。航迹质量管理可以避免因系统误差、随机误差或航迹相交时引起的错误关联[3]。在航迹管理模块中设有专门的编批计数器来对接收的航迹进行重新编号;当连续一段时间不再报送某一航迹将对该航迹进行消批处理,当航迹关联错误时则要进行改批处理。
3.6算法流程
算法流程图如图3所示。其中,航迹预处理模块包括坐标转换和时间对齐。融合算法里涉及两类融合处理,一种是雷达与雷达间航迹相关融合,另一种是AIS与雷达间的航迹相关融合,并基于AIS数据实时计算雷达的探测精度。最终的融合航迹存在三种类型,第一种是航迹仅来源于雷达传感器,第二种是航迹仅来源于AIS传感器,第三种是航迹来源于雷达与AIS两类传感器。

图3 算法模块流程图
4 仿真设计
4.1仿真条件设定
假设观测水域内有2条船,均事先在想定中设定船的真实航迹数据。假设观测水域内有两条船A、B,其中A船上携带AIS相关设备,船B不携带。在想定中设定两条船行进的路线,为简化模型起见,假设船A,B均做匀速直线运动,其真实航迹如图4所示。其中船A航向为正北60°,航速为12m/s,航迹为:
自1945年创建以来,浩亭一直是一家100%的家族企业并传承到第三代,保持着独立家族性质的企业愿景,并发展成为工业连接技术领域的全球领先供应商,其连接技术覆盖三条生命线:电力、信号和数据,在全球44个国家拥有13个生产工厂和子公司。如今的浩亭正逐步从产品供应商向解决方案提供商转型,可全面提供数字化产品、软件、硬件和工程服务等。
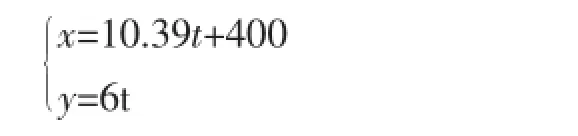
船B航向为正北30°,航速为12m/s,航迹为:

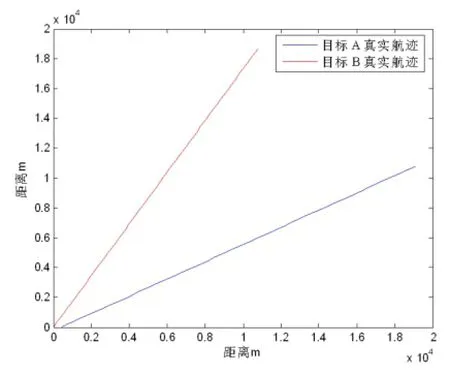
图4 A,B船真实航迹数据
仿真模拟中,雷达和AIS传感器向数据处理中心发送目标的唯一标识号、目标位置、目标位置所对应的时间,此外,雷达的报告频率为30秒,AIS的报告频率为2秒,且均不考虑传输延时问题。

在一段仿真时间内(30分钟),雷达1和雷达2分别对目标A和目标B的探测数据如图5所示,其中直线为真实航迹。
4.2仿真流程

图5 雷达1,2和AIS对目标A,B的航迹描述

图6 仿真流程图
本文基于QT进行仿真模拟,完成整个仿真流程需要通信软件、控制软件、目标模拟软件、雷达探测模型软件、AIS模型软件和数据处理中心模型软件,其中数据处理中心软件是完成数据融合的关键软件。整个仿真流程图如图6所示。
具体仿真流程如下:
(1)启动控制和通信软件,目标模拟模型、雷达探测模型、AIS模型和数据处理中心模型初始化,所有软件时间统一到唯一的仿真时间,仿真开始。
(2)雷达探测模型和AIS模型探测到目标模拟模型模拟的目标信息,发送给数据处理中心。
(3)数据处理中心进行数据预处理,时间对齐,航迹关联,雷达性能评估,数据融合,相关数据显示、存储,数据处理中心的仿真处理流程图如图7所示。
5 仿真分析
通过雷达1,2与AIS对A的探测航迹进行对比,根据公式(1)计算得到雷达1,2的实时探测精度,时间窗可取为5分钟,即每个时间窗内雷达有10个探测点迹。根据公式(4)计算雷达实时融合权重,并将权重带入公式(2)计算目标B的融合航迹。实时融合航迹结果如图7中红色加号所示,按历史评估(非实时评估)进行分配权重,目标B的融合航迹如图8中绿色圆圈所示。

图7 融合中心数据处理仿真流程图


图8 雷达1,2对目标B的融合航迹
6 结语
针对AIS探测精度高的特点,可采用AIS数据与雷达数据关联融合的方式可提高融合航迹的质量。利用AIS数据与雷达数据关联对比,可对雷达进行实时性能分析,从而修正雷达间的融合权重的模型,并基于QT对模型进行仿真验证。仿真实验证明,基于AIS实时修
正雷达融合权重,可获得更精确的融合航迹。
此外,在实际应用中,目标距离远近、雷达探测角度及气象环境均会对目标的探测精度产生影响,故当观测水域面积过大时,可对水域进行分割,并在计算公式(1)时,尽可能选择前进方向一致或方向夹角较小的目标作为对照参考,以减少海杂波等环境因素的影响。
[1]胡晓瑞.基于BP神经网络的雷达与AIS目标信息融合处理研究[D].集美大学,2012.
[2]华中和.防空指挥控制信息处理[M].北京:中国人民解放军空军雷达学院,1989.
[3]穆加艳.雷达数据与AIS数据融合的应用研究[D].南京:南京理工大学,2011.
[4]周必全.雷达与AIS的数据融合及雷达性能评估[D].哈尔滨:哈尔滨工业大学,2013.
[5]李洋,张靖,石教华,张晓丽.目标航迹融合质量度量方法研究[J].中国电子科学研究院学报,2015,6(3):254-259.
[6]吴顺君,梅晓春.雷达信号处理和数据处理技术[M].北京:电子工业出版社,2008.
[7]庞云峰,张 韧,黄志松,张军.大气—海洋环境对武器系统标准效能的增益或损伤[J].指挥控制与仿真,2009,4(2):65-69.
Radar;AIS;Data Fusion
文章编号:1007-1423(2016)18-0014-04DOI:10.3969/j.issn.1007-1423.2016.18.003
The Data Fusion between Multi-Radar Based on AIS Real-Time Evaluation of Radar Performance
SHI Zi-ye JIAO Xiu-zhen
(China Academy of Electronics and Information Technology,Beijing 100041)
1007-1423(2016)18-0009-06
10.3969/j.issn.1007-1423.2016.19.002
石子烨(1987-),女,山东临沂人,博士,工程师,研究方向为数据综合处理,仿真支撑模型设计
2016-06-14
2016-06-20
雷达和AIS是两类探测海上目标信息的重要传感器,可进行信息互补,提高探测精度。为提高多雷达的探测精度,提出基于AIS测定雷达精度的多雷达数据实时融合的模型框架和实现思路。最后用QT对数据融合模型进行仿真和分析。仿真结果验证该模型的有效性和可用性。
雷达;AIS;数据融合
焦秀珍(1985-),女,山西大同人,硕士,工程师,研究方向计算机仿真、效能评估、仿真支撑模型设计
Radar and AIS are two kinds of important sensors to obtain the information of the target in the sea,which can offer complement information for each other.It is more accurate in estimating the target motion parameters.Proposes a model and research scheme about the fusion of real-time radar data based on the evaluation of radar in order to improve evaluation about the fusion track of radar on time,carries out simulation and analysis about the model of the data fusion by QT.Simulation results verify that the proposed model is effective and available.
猜你喜欢
新世纪智能(数学备考)(2021年9期)2021-11-24
青年歌声(2019年12期)2019-12-17
当代陕西(2019年15期)2019-09-02
学苑创造·A版(2018年11期)2018-02-01
雷达学报(2017年3期)2018-01-19
北京航空航天大学学报(2017年7期)2017-11-24
北京航空航天大学学报(2017年12期)2017-04-23
读者(2017年5期)2017-02-15
北京航空航天大学学报(2016年6期)2016-11-16
新疆农垦科技(2016年10期)2016-06-15