基于DSP的卫星太阳能电池板姿态控制系统设计*
2016-09-18 08:46:54闻嘉程
山西电子技术 2016年4期
闻嘉程,王 斐
(河南科技大学 信息工程学院,河南 洛阳 471023)
基于DSP的卫星太阳能电池板姿态控制系统设计*
闻嘉程,王斐
(河南科技大学 信息工程学院,河南 洛阳 471023)
卫星太阳能电池板将太阳能转换为电能,是卫星能源供应系统的重要组成部分。为了实现能源利用率的最大化,设计了基于DSP的太阳能电池板姿态控制系统。通过控制太阳能电池板姿态,太阳能电池板可以完成太阳光的最有效采集,提高太阳能电池板的光电转换效率。首先,依据太阳能电池板输出短路电流与太阳光照强度成正比这一原理,测量出太阳光相对于太阳能电池板的入射角;然后,利用DSP处理并生成电机控制信号;最后,驱动步进电机转过相应角度,完成姿态控制,从而使电池板达到最大采光率。测试结果表明,控制系统显著提高了太阳能电池板的采光率,性能稳定,为卫星能源利用率最大化提供了可靠保障。
太阳能电池板;太阳光线入射角;姿态控制;步进电机;DSP
太阳能电池板是卫星的一个独立系统,也是卫星在轨飞行时唯一主动提供能源的子系统。电池板像发电机一样,把光能转换成电能,源源不断地输送给飞船中的其他系统。因此,太阳能电池板光电转化效率的高低和姿态控制是否合理,将直接影响卫星整体的工作状态与能源的利用率,所以,卫星太阳能电池板系统对于卫星平台具有重要作用,在卫星能源利用的研究中,对卫星太阳能电池板姿态的控制就显得尤为必要。
目前使用最为广泛的太阳能电池板控制系统为太阳光跟踪系统,而跟踪太阳的方法主要有热敏电阻温度比较法和光敏电阻光强比较法[1]。热敏电阻温度比较法通过安装在太阳能电池板上的温度传感器测量出太阳能电池板上温度的高低从而判断太阳具体的偏差位置,如果温度高说明太阳在这个方向,则控制电机向该方向转动,反之则相反。该系统设置简单,但是稳定性差,跟踪精度低,响应速度慢。光敏电阻光强比较法则是利用光敏电阻在光照时阻值发生变化的原理,在电池板上布置一定数量的光敏元件来测量在不同位置时光敏电阻的阻值变化情况,当阻值变小,说明所受光照强,则控制电机向该方向转动;阻值变大时,说明所受光照弱,则控制电机向相反方向转动。但是光敏电阻在光照条件复杂和温度变化大的环境下受影响较大。
通过上面的比较可以发现,上述两种方法对环境的要求较高,而卫星所处的工作环境较恶劣,因此这两种方法都不太适合于卫星系统。通过进一步研究发现太阳能电池板的输出短路电流与光照强度具有正比关系,因此,可以通过太阳能电池板的输出短路电流来计算太阳光相对于电池板的入射角度。当输出短路电流发生变化时,可以间接测量出光线的角度变化情况,进而通过控制系统生成控制信号,控制电池板转动,使光线相对于电池板达到最大光照率。这种控制系统精确度较高,且电路也比较容易实现。
因此,本文根据太阳能电池板对太阳光最大采集率的要求,给出基于TMS320F28335的太阳能电池板姿态控制系统的设计过程。该系统能根据太阳能电池板的输出短路电流与光照强度成正比关系,实时完成输入信号的采集、处理、数据后处理和生成控制信号。控制系统是一个闭环系统,能实时检测出太阳能电池板的输出短路电流,生成控制信号调节太阳能电池板姿态,从而大大提高采光率。
1 系统工作原理
基于上述原理的分析,选择控制精度高和电路易于实现的输出短路电流法作为最终方案,其实现电路的原理框图如图1所示。
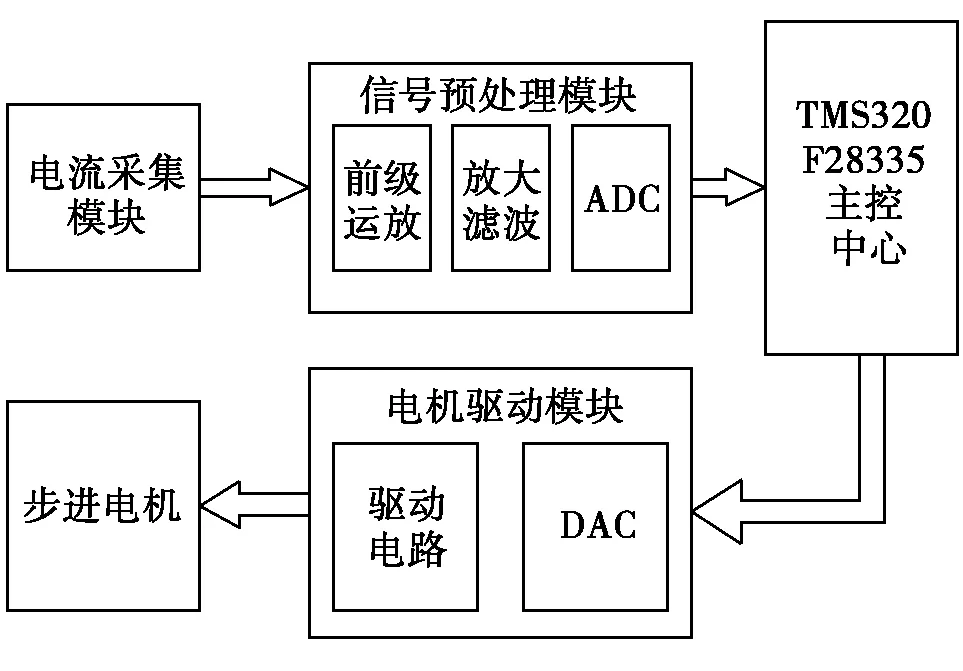
图1 控制系统原理框图
控制系统主要由电流采集模块、信号预处理模块、主控制模块、电机驱动模块以及相应控制软件组成。
对卫星太阳能电池板姿态控制时,系统的主要任务是对太阳光输出短路电流的测量。而对于普遍的太阳能电池板自动跟踪系统的光敏电阻光强比较法,主要是通过在电池板东西方向边沿处的下方分别放置两个完全相同的光敏电阻,当两光敏电阻的阻值相同时,则说明光线直射在电池板上,此时电机也就不转动。若两光敏电阻阻值不同,则太阳光与电池板在垂直方向上有一定的夹角,则驱动电机向光敏电阻阻值减小的方向转动,直至两个光敏电阻阻值再次相等。
然而,对于卫星上的太阳能电池板,由于卫星始终在不停地围绕地球运动,因此,太阳能电池板无法始终与太阳光线垂直。所以我们利用光照强度与太阳能电池板输出短路电流成正比的关系,采集卫星在各个位置时太阳能电池板的输出短路电流,然后将采集到的信号送入主控系统中,进行进一步的处理和比较,继而生成控制信号,控制步进电机转动一定的角度,从而使得太阳能电池板的吸光率达到最大值。
2 系统控制条件
卫星太阳能电池板姿态控制的目的,主要是为了提高电池板对光线的采集率。但是在太空中的太阳能电池板与地面的电池板存在着很大的差别,太空中太阳能电池板无法始终跟踪太阳光,即电池板与入射光的夹角无法永久的保持垂直。因此,要使卫星太阳能电池板姿态控制系统工作需要达到一定的条件[2]。
当卫星运行至地球背光面时,太阳能电池板将得不到太阳光照,则此时无需调节太阳能电池板的姿态,控制系统停止工作,否则将会浪费能源。
太阳能电池板得不到光照的条件有:
第一,卫星进入地球背光面时,如图2所示,卫星位置矢量P与太阳光线入射方向单位矢量L的夹角取值为0°≤α≤90°时处在地球背光面,所以要使系统停止工作需满足的第一个条件为0°≤α≤90°;
第二,当卫星穿越白昼黑夜交界面,由白昼进入黑夜时,在一段时间内太阳能电池板仍然能够接收到一部分阳光,所以需满足的第二个条件是,卫星位置矢量P在地球白昼黑夜分界面上的投影长度|OD|≤R,R为地球半径,|OD|=|P|sin(α)。
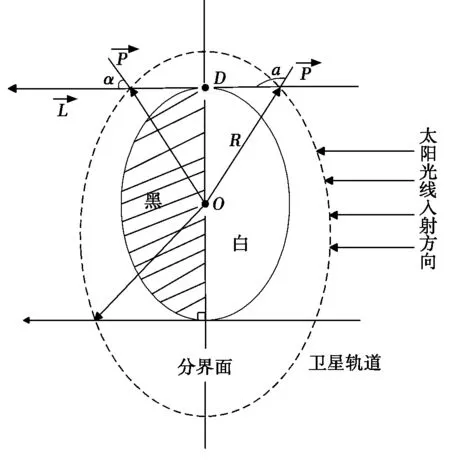
图2 太阳光线照射卫星示意图
3 系统硬件设置
系统硬件主要包括信号采集系统、信号预处理系统、主控制系统及电机驱动系统。
采集系统主要是运用模拟量的检测方式,通过测量在不同位置时太阳能电池的输出短路电流来计算太阳光入射角度。太阳能电池板的短路电流与光照强度成正比,当太阳光线与太阳能电池板所在平面的夹角较小时,太阳能电池板的短路电流也将会减小,其变化关系如图3所示。
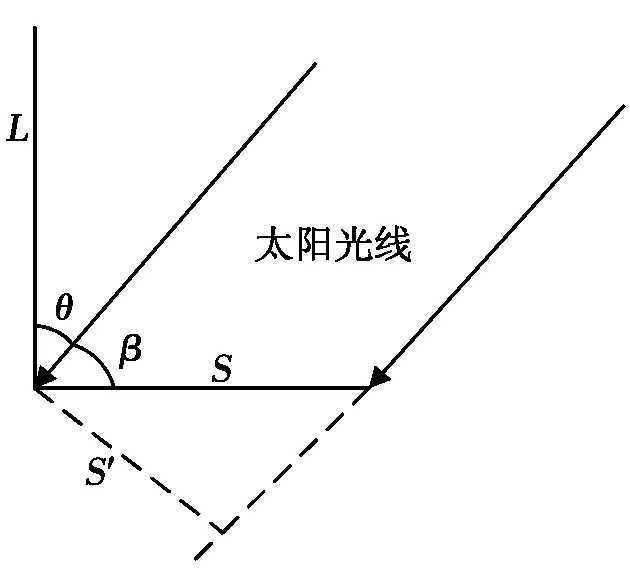
图3 短路电流与太阳光线入射角关系
在图中,S为太阳能电池平面的面积,L为太阳能电池平面的法线,L与太阳光线的夹角为θ,则S与S′的关系有:
S′=Scosθ.
(1)
通过分析可知,太阳能电池板实际接收光线的面积只相当于S在太阳光方向的投影面积。因此,只有将太阳能电池板正对太阳光线才能获得最大能量,即太阳能电池板接收光线的面积与太阳光线入射角β具有反比关系。当太阳光线与电池板垂直时,太阳能电池板接收光线的面积将达到最大[3]。
所以,根据太阳能电池的短路电流与光照强度的线性关系,利用叠加原理,可知太阳电池的短路电流iSC的关系为:
iSC=I0+Imcosθ.
(2)
则短路电流与太阳光入射角的关系为:
iSC=I0+Imsinβ.
(3)
式中,I0为反射光对应的短路电流,短时间内该值为常数;Im是θ为0时的入射光对应的短路电流。
因此,可以通过测量出太阳能电池板短路电流的大小来间接测量太阳光的入射角。
信号预处理系统由前级运放、滤波电路、放大电路及ADC电路组成[4]。信号预处理系统主要是对来自采集系统中采集到的信号进行进一步的处理,将有用信号提取处理,调理成满足AD转换电路中所要求的信号,最终送入主控制中心进行对比处理。
主控制系统主要以TMS320F28335作为控制芯,通过使用芯片内部的资源来完成对整个系统的综合管理和控制功能。
电机驱动系统主要由DAC电路与步进电机驱动电路组成[5]。DAC电路使用的是TMS320F28335自身所带的12位DAC,将处理后的信号传送至驱动电路中;步进电机驱动电路使用的ULN2003A驱动芯片,它可以提供高达500 mA的输出电流,5 V供电,可以提供7对输入/输出通道,能满足同时驱动两个步进电机来控制两片太阳能电池板的转动。
4 系统软件设计
太阳能电池板姿态控制系统的软件采用TI公司的CCSV6.1设计开发。该软件以ANSI C为核心,是一款针对TMS320系列DSP的集成开发环境,编程方式灵活,函数库丰富,可以较好地提高软件开发效率。
软件设计采用模块化原则,以提高软件设计的灵活性和通用性,软件构成如图4所示。
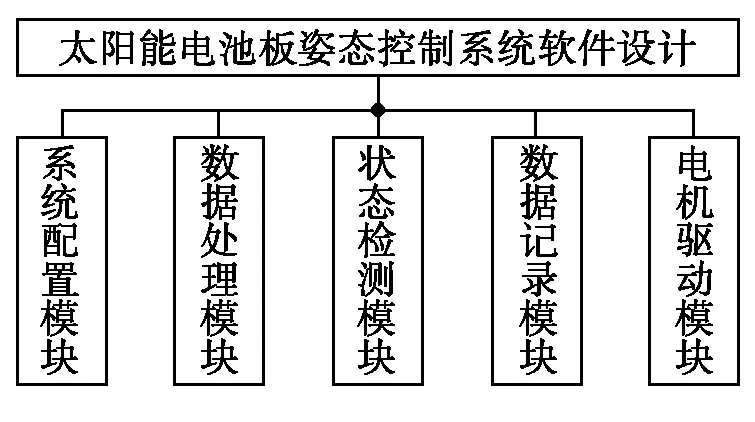
图4 电池板姿态控制系统软件构成图
系统配置模块主要完成姿态控制系统的控制参数配置、定时器配置、I/O参数配置、系统路径配置和输出配置等功能。
数据处理模块主要完成对采集系统中得到的电流参数,转换成太阳光入射角角度值,并且实时对反馈信号进行比较判断,生成电机驱动信号。
状态监测模块主要完成太阳能电池板各位置所对应的短路电流参数的实时采集,并且将测试数据按照一定的频率实时传送到数据处理中心进行处理。
数据记录模块主要以指定数据格式和存储路径完成对采集后计算生成的太阳光线入射角的数据进行记录存储,以便姿态控制结束后的数据分析和处理。
电机驱动模块主要完成步进电机的驱动功能,将数据处理中心所生成的驱动信号,通过驱动芯片ULN2003A驱动步进电机转动固定的角度,从而使电池板采光率达到最佳。
5 测试环境与结果
为了验证系统性能,构建一套模拟测试平台。该测试平台主要有模拟太阳光源,地球,卫星和三者的运动轨道。利用氙气灯作为太阳,将地球与卫星放在模拟轨道中,以一定的速度进行自转与公转。然后利用计算机实时监控光线的入射角以及太阳能电池板转动的角度。
利用该测试平台对卫星太阳能电池板姿态控制系统进行多次重复测试,得到部分测试数据如表1所示。
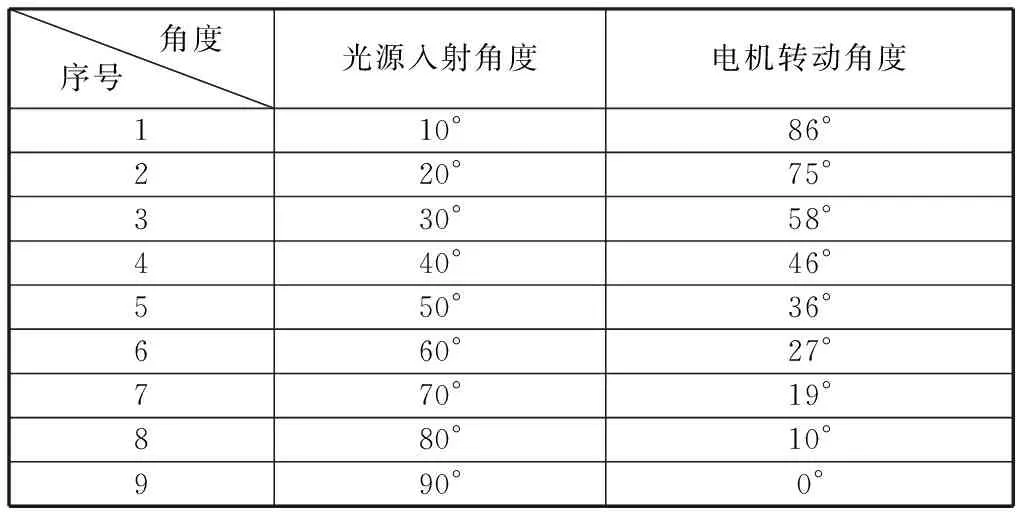
表1 电池板综合测试数据表
根据电机的转动角度与光线入射角度对比分析知测试值和误差均在允许范围内[6],测试结果表明该系统的性能良好,达到预期效果。
6 结论
基于DSP的太阳能电池板姿态控制系统能够较好地完成使太阳能电池板达到最大采光率的功能,可以自动调节电池板达到最佳位置。将该控制系统放在模拟太空环境下进行测试,结果表明,系统性能良好,测试结果达到预期的性能指标,且运行可靠。本设计方案设计简便,适宜于太阳能电池板姿态控制的实际应用,为提高太阳能电池板采光率提供了重要的依据。
[1]杨鹏,史旺旺,刘松青,等.基于太阳能电池的大范围太阳光入射角测量方法研究[J].太阳能学报,2011,2(2):216-219.
[2]王雪文,王洋,阎军锋,等.太阳能电池板自动跟踪控制系统的设计[J].西北大学学报,2004,2(2):163-164.
[3]张龙慧,宋杨,唐俊,等.基于Open Inventor的卫星姿态控制可视化仿真[J].计算机技术与发展,2009,19(11):214-217.
[4]黄彦智,何宁,赵佳庆.基于平衡式阵列的光电传感太阳跟踪系统[J].桂林电子科技大学学报,2015,35(5):377-381.
[5]陈多飞,钟加杰,陈荣.太阳光入射方向的检测与太阳能电池板方位控制系统[J].盐城工学院学报,2014,27(4):1-4.
[6]李燕斌,谭阳,王海泉,等.光伏发电逐日跟踪控制系统设计[J].中原工学院学报,2014,25(6):11-15.
Design of Solar Panel Satellite Attitude Control Based on DSP
Wen Jiacheng, Wang Fei
(SchoolofInformationEngineering,HenanUniversityofScienceandTechnology,LuoyangHenan471023,China)
The satellite solar panels are the important parts of energy supply in satellite system, which can convert solar energy into electrical energy. The attitude control system of solar panel is designed to realize the maximum acquisition rate of solar power based on DSP. The solar panels can accomplish most efficiently to capture sunlight and improve the photoelectric conversion efficiency by controlling the attitude of solar panels. First, according to the principle that the short-circuit current output from solar panels is in proportion to the solar light, the sunlight angle of incidence is measured with respect to solar panels; Then, the DSP is used to process and generate the motor control signal; finally, it drives the stepping motor turning to the corresponding angle to complete the attitude control, so that the satellite solar panels reaches the maximum lighting rate. The test results show that the control system significantly improves the lighting rate of solar panels and the performance is stable, provides a reliable guarantee for the maximize utilization of satellite energy.
solar panel; sunlight angle; attitude control; stepper motor; DSP
2016-05-07
2016-05-19
河南科技大学大学生科研训练计划项目(SRTP2015-03)
闻嘉程(1994- ),男,广东惠州人,学生,本科。
王斐(1976- ),男,河南洛阳人,副教授,博士,主要从事复杂光机电系统建模控制仿真及VV&A方向的研究。
1674- 4578(2016)04- 0039- 03
TM914.4;V448.22
A
猜你喜欢
军事文摘(2021年18期)2021-12-02 01:28:16
装备制造技术(2021年1期)2021-05-21 07:54:44
新能源科技(2021年8期)2021-04-02 19:39:55
——以高PbI2掺杂水平的钙钛矿光阻膜、Bi2S3光阻膜、ZnO光阻膜为例
电子元器件与信息技术(2020年11期)2020-12-14 05:53:08
自动化学报(2018年2期)2018-04-12 05:46:05
知识就是力量(2017年12期)2018-01-15 10:57:23
山西青年(2017年8期)2017-01-31 02:45:46
通信电源技术(2016年4期)2016-04-04 02:57:36
电源技术(2015年2期)2015-08-22 11:28:04
物理实验(2014年8期)2014-09-12 00:35:56