
多旋翼自主飞行器
2016-09-16 08:27西北民族大学电气工程学院赵宇萌
电子世界 2016年12期
西北民族大学电气工程学院 赵宇萌 邢 宇
多旋翼自主飞行器
西北民族大学电气工程学院赵宇萌邢宇
四旋翼飞行器系统由数据采集、数据信号处理、飞行姿态和航向控制部分组成。系统选用瑞萨RL78/G13 MCU板作为主控芯片,通过超声波采样判断离地高度,从而调节PWM保证飞行器控制在h1和h2示高线范围内。采用MPU-6050芯片采集飞行器的三轴角速度和三轴角加速度数据,对这些数据进行PID算法处理给出相应指令,对飞行姿态进行控制。用激光传感器检测出黑色指示线,使飞行器在指定飞行区域及到达指定圆形区域,同时用摄像头进行拍摄工作。
四翼飞行器;RL78/G13 MCU板;MPU-6050;超声波测距
1 系统方案
本系统主要由控制模块、电机调速模块、高度测量模块、电源模块、循迹模块组成。采用瑞萨RL78/G13 MCU开发板为主控芯片,采用MPU-6050芯片采集的数据,对从MPU-6050芯片中读取到的一系列数据进行PID算法处理,通过PWM输出给飞行器的电调给出相应指令对飞行器的飞行姿态进行控制,同时通过超声波传感器可以方便的测出飞行高度。电源采用锂电池减轻飞行器的自身重量。
2 系统理论分析与计算
2.1四旋翼飞行器的基本原理的分析
2.1.1基本工作原理
四旋翼飞行器是由固连在刚性十字交叉结构上的4个电机驱动的一种飞行器[1]。
四旋翼飞行器产生基本动作的原理:电机l和3逆时针旋转驱动两个正桨产生升力,电机2和4顺时针旋转驱动两个反桨产生升力。反向旋转的两组电机和桨使其各自对机身产生的转矩相互抵消,保证4个电机转速一致时机身不发生转动。电机1和4转速减小(增大),同时电机2和3转速增大(减小),产生向前(后)方向的运动。电机1和2转速减小(增大),同时电机3和4转速增大(减小),产生向左(右)方向的运动。4个电机转速同时增大(减小)产生向上(向下)的运动。对角线的电机一组转速增大,另一组转速减小产生自身旋转运动[2]。
2.1.2系统结构及硬件组成
三轴陀螺仪、三轴加速度计和三轴磁力计组成姿态测量系统,主控制器将姿态测量系统的数据进行解算得到当前姿态,再与通过无线模块接收的姿态控制指令一起作为姿态PID控制器的输入,姿态控制器输出相应的PWM信号分别驱动4个电调,进而改变4个电机的转速实现姿态控制[3]。旋翼对称分布在机体的前后、左右四个方向,四个旋翼处于同一高度平面,且四个旋翼的结构和半径都相同,四个电机对称的安装在飞行器的支架端,支架中间空间安放飞行控制计算机和外部设备[4-5]。
2.2姿态解算算法计算
2.2.1初始姿态获取

当飞行器处于静止状态时,参考坐标系下的加速度为重力加速度()=(0,0,0),可得:


2.2.2四元数姿态更新
首先将欧拉角转换为四元数,然后进行四元数的更新,如式(2-6)。代表陀螺采样时间间隔。代表载体坐标系下的角速度,由陀螺得到[9-10]。

2.2.3规范化四元数
表征旋转的四元数应该是规范化四元数,因为计算过程中四元数会逐渐失去规范化特性,所以必须对四元数做规范化处理。使用互补滤波器矫正后的欧拉角,先转换为四元数,然后使用式(2-7)对其进行规范化后再进行更新操作。

2.3PID控制算法的计算
PID控制器由比例单元、积分单元和微分单元组成[11]。输入一般是系统输出与一个参考值的差值即控制偏差,然后把这个差别用于计算新的控制量,目的是可以让系统的输出达到或者保持在参考值。对角速度做积分预算实际得到的就是角度,若四轴有一个倾斜角度,则四轴就会自动调整,直到四轴的倾角为零,所产生的抵抗力与角度成正比[12]。若只有积分的作用,会使四轴产生振荡,必须将P和I结合起来一起使用[13]。
3 电路与程序设计
3.1电路的设计
系统总体框图:
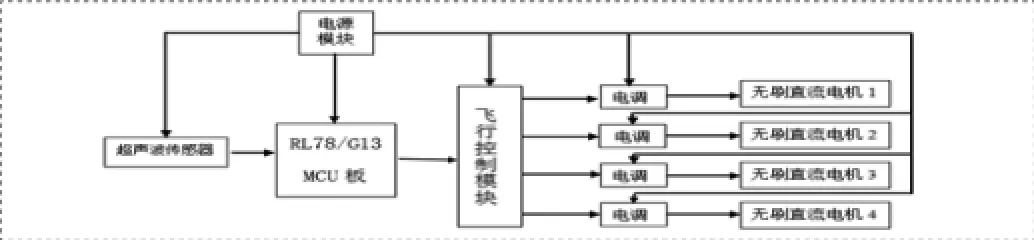
图1 系统总体框图
3.2程序设计思路和流程图
主程序流程图如图2所示。根据瑞萨RL78/G13 MCU板的特点,主要思路:单片机上电、延时等待电源稳定、减少电源波动对系统的干扰,之后利用定时器设定电机PWM周期、串口初始化,在串口中断服务函数中不断接收各类传感器发送的数据,且为数据的有效性设定特定帧头、状态位、结束位和校验位。在初始化结束后,设定目标姿态、进入循环函数,不断检测各类传感器数据是否接收完成,一旦接收到有效的姿态数据,就进入姿态控制函数。在姿态控制函数内部,利用当前四轴飞行器的翻滚和俯仰数据,结合模糊控制算法,解算出不同姿态,每个空心杯电机需要的调整量,这样不断的接收姿态数据,解算数据,调整量输出,使四轴飞行器稳定的飞行。
4 测试方案与测试结果
4.1测试方案
4.1.1硬件测试
检查多次,仿真电路和硬件装置,硬件测试:在硬件电路组装前,先进行电子调速器和电机的单独测试,组装完成后用遥控器进行整体测试。
4.1.2软件仿真测试
在调试程序之前,先用示波器观察瑞萨单片机PWM输出,并用程序模仿飞行器的飞行方法,通过对其仿真来测试PWM的稳定度。

图2 主程序流程图
4.1.3硬件软件联调
对飞行器起飞、悬浮、降落、前进、后退、左转、右转进行测试,利用实际飞行区进行测试。
4.2测试条件与仪器
测试条件:电路与系统原理图完全相同,并且检查无误,硬件电路保证无虚焊。且在试飞场地进行多次测试到达目的时间和偏离目的地情况。
测试仪器:高精度数字示波器,数字万用表,四轴飞行器专用遥控器。
4.3测试结果及分析
4.3.1测试结果

表4-1 A到B测试表
4.3.2测试分析与结论
根据上述测试数据,可以得出以下结论:(1)测量的最大时间符合设计所规定的时间。(2)飞行器在空中飞行时间越长,控制性能越好,飞行越稳定,飞行器降落时偏离目标距离越短。
综上所述,本设计达到设计要求。
5 结论与心得
此次设计用到了瑞萨芯片输出PWM波控制无刷电机的转速,通过I2C通信系统连接MPU6050传感器控制飞行器的平衡,并运用了姿态算法、标准PID算法,使其达到一致从而保证飞行器稳定飞行。
在对四轴飞行器测试过程中,有很多问题。由于电机和机架的震动,加速度计对姿态的估计干扰无法消除,使得遥控器不给控制指令的时候,四轴飞行器也会往一边偏移运动;陀螺仪的误差导致长期姿态的估计误差会越来越大;四轴飞行器的稳定飞行对四个电机或电调性能的一致性要求较高。
[1]王业潘,孙骅,李文静.微型四旋翼直升机控制系统设计[J].广州大学学报,2010,10(2):35-41.
[2]聂博文,马宏绪,王剑,王建文.微小型四旋翼飞行器的研究现状与关键技术[J].电光与控制,2007,14(6):113-116.
[3]张广玉,张洪涛,李隆球,王林.四旋翼微型飞行器设计[J].哈尔滨理工大学学报,2012,17(3):110-114.
[4]陈海滨,殳国华.四旋翼飞行器的设计[J].实验室研究与探索,2013,32(3):41-44.
[5]李小明.无刷直流电机调速系统研究与设计[J].科技信息,2010(35):124-125.
[6]李秀英,刘彦博.基于PWM的四旋翼飞行器控制方法[J].吉林大学学报,2011,29:464-472.
[7]刘焕晔.小型四旋翼飞行器飞行控制系统研究和设计[D].上海:上海交通大学,2009.
[8]叶树球.四翼飞行器姿态控制算法研究[D].安徽:安徽理工大学,2015.
[9]何瑜,四轴飞行器控制系统设计及其姿态解算和控制算法研究[D].成都:电子科技大学,2015.
[10]孙书诚,郎朗,陈孟元.模糊自适应PID控制器在交流伺服控制系统中的研究[J].长春工程学院学报,2012,13(2):39-42.
[11]童诗白.模拟电子技术基础[M].北京:高等教育出版社,2006.
[12]李俊,李运堂.四旋翼飞行器的动力学建模及PID控制[J].辽宁工程技术大学学报(自然科学版)[J].2012,31(1):115-117.
[13]王史春.四旋翼飞行器PID优化控制[J].河北科技大学学报,2013,34(5):457-463.
赵宇萌(1994—),女,河北晋州人,大学本科,现就读于西北民族大学电气工程学院。
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
电子制作(2019年9期)2019-05-30
电子制作(2018年2期)2018-04-18
自动化学报(2018年2期)2018-04-12
北京航空航天大学学报(2016年8期)2016-11-16
通信电源技术(2016年4期)2016-04-04
北京航空航天大学学报(2016年3期)2016-02-27
小朋友·快乐手工(2015年5期)2015-06-06
