
基于近岸GPS RTK技术的潮位和波浪提取算法研究
2016-09-14 09:17党超群齐占辉李明兵赵江涛
电子设计工程 2016年2期
党超群,齐占辉,李明兵,赵江涛
(国家海洋技术中心 天津 300112)
基于近岸GPS RTK技术的潮位和波浪提取算法研究
党超群,齐占辉,李明兵,赵江涛
(国家海洋技术中心 天津300112)
基于实现潮位和波浪信息的同步提取目的,采用仿真方法来获得近岸GPS RTK技术测得的实时海面高程数据,鉴于潮汐和波浪的周期相差甚远,对仿真数据进行相应的低通和带通滤波即可提取。通过对仿真数据进行平滑滤波、中值滤波、小波滤波等低通滤波,以及椭圆、巴特沃斯等带通滤波结果分析表明:1)近岸GPS RTK技术可用于潮位和波浪同步测量;2)对于潮位信息的提取方面,平滑、小波、巴特沃斯低通滤波对仿真数据处理结果较好,经验模式分解(EMD)起始阶段结果较差,后续效果较好,效果最差的是中值滤波;3)对于波浪信息的提取方面,椭圆滤波、巴特沃斯、切比雪夫Ⅰ型效果较好,巴特沃斯Ⅱ型效果较差,equiripple和开尔文带通滤波效果最差。
GPS RTK;潮位和波浪信息提取;滤波算法;仿真
GPS潮位测量是采用GPS RTK技术,通过测得一段时间内水面上的测船或浮球(称为标体)上的GPS天线的系列高程值,计算出潮位。国外在20世纪90年代初首次出现了GPS潮位测量的概念,并相继开展了船载及浮标式潮位测量的可行性试验,试验证明GPS潮位测量可以达到厘米级的精度[1-2]。
GPS波浪浮标利用GPS卫星信号的多普勒频偏原理测量浮标的运动状态[3-4],进而反演出波浪谱,最后由波浪谱算出波浪的特征值数据并把特征值数据存储和发送。当前,国家海洋技术中心研制的GPS波浪浮标已进入国家海洋局业务化试运行。
文中基于GPS技术在潮位和波浪测量方面的应用,提出了基于近岸GPS RTK技术的潮位和波浪提取算法研究。
1 基于近岸GPS RTK技术的潮位和波浪测量原理
1.1GPS RTK技术
GPS RTK技术是以载波相位观测值为基础的实时差分GPS(GPS RTK)技术。实时动态定位(RTK)系统是由基准站和流动站组成,RTK定位技术实现的关键在于数据的传输和数据的实时处理,建立无线数据通讯是实时动态测量的保证。
1.2潮位测量原理
GPS水上潮位测量采用载波相位差分技术[6-7],获取水面标体的瞬时高程值,对瞬时高程值进行低通滤波处理即可提取其中的潮位信息,其测量原理如图1所示。
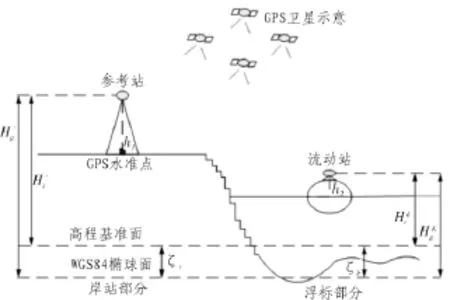
图1 基于近岸GPS RTK技术的潮位测量原理Fig.1 Theory of tide measuring based on off-shore GPS RTK technology

如果在流动站上测得重力异常值,或者有精细的局部重力场模型,就可以计算出高程异常值,否则,在基准站和流动站相距不长的情况下(受RTK的限制,一般在30 km以内),认为与基站上的ξr相同,即

1.3波浪测量原理
GPS RTK波浪测量利用之前获取的水面标体瞬时高程值,经带通滤波后提取出波浪信息,进而通过波浪信息反演出波浪谱,最后由波浪谱计算出波浪的特征值数据。
2 基于仿真数据的潮位和波浪信息提取算法研究
2.1仿真的水面瞬时高程数据
设水面瞬时高程数据[6](12 h的观测的水面高程数据)由两个周期分别为12 h和6 h的潮位、周期为2、8、14、20 s的波浪和姿态等引起的均值为0,方差为0.05 m2的随机噪声引起,具体组成如下:
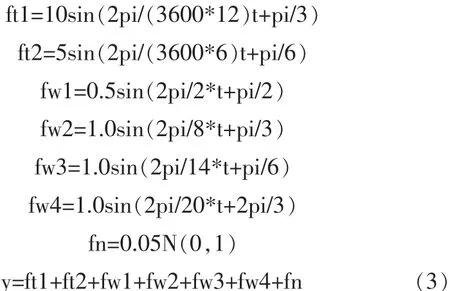
其中,ft1、ft2为潮汐函数;fw1、fw2、fw3、fw4为波浪函数;fn为随机噪声。其时域和频域图如图2所示。
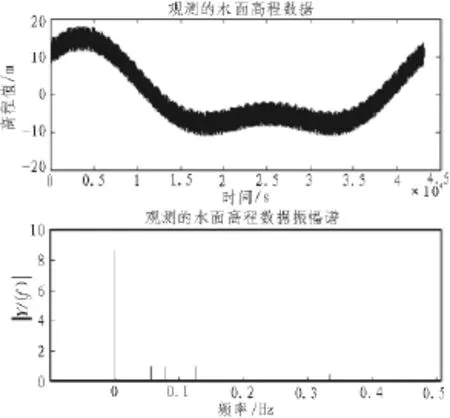
图2 观测的水面高程数据的时域和频域图Fig.2 Time-domain and frequency-domain plot of observing sea level altitude data
2.2潮位信息的提取
观测的水面高程数据,受到海浪谱等外界的干扰和噪声的影响,其精度不能完全满足潮位观测要求,需要对数据进行滤波处理。潮位信息相对于波浪信息属于低频信息,文中分别使用EMD滤波、中值滤波、小波滤波、平滑滤波、巴特沃斯滤波等方法对观测的水面高程数据进行滤波处理,并对结果进行了对比,如图3所示。
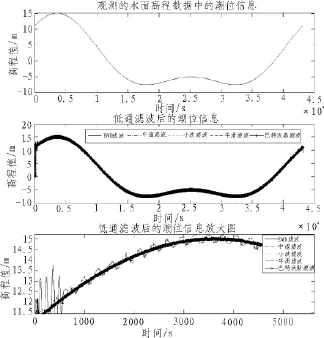
图3 观测的水面潮汐信息与低通滤波后的仿真数据对比图Fig.3 Comparison plot of the tide information of observing sea level with the simulation data which has gone through the low pass filter
对比结果显示,经过低通滤波算法处理后潮位数据有一定程度的改善,详如表1。根据滤波后的潮位数据与观测的水面高程数据中的潮位信息作对比,平滑滤波、小波滤波的滤波效果较好;EMD滤波在数据起始阶段滤波效果较差,后续的滤波效果较好;巴特沃斯滤波和中值滤波效果较差。因此真实海况下GPS RTK测量的观测的水面高程数据中的潮位信息的提取建议采用平滑或小波滤波器。

表1 不同滤波方式的数据对比Tab.1 Data comparison of different types of filtering
2.3波浪信息的提取
观测的水面高程数据,受到潮汐等外界的干扰和噪声的影响,其精度不能完全满足海浪观测要求,需要对数据(1 h的观测的水面高程数据)进行滤波处理。本文采用了切比雪夫Ⅰ型、椭圆、巴特沃斯、equiripple、切比雪夫Ⅱ型、开尔文等带通滤波进行滤波,成功提取到观测的水面高程数据中的波浪信息。如图4所示。

图4 观测的水面波浪信息与带通滤波后的数据对比图Fig.4 Comparison plot of the wave information of observing sea level with the data which has gone through the band pass filter
根据带通滤波后的提取的波浪信息与观测的水面高程数据中的波浪信息作对比,椭圆、巴特沃斯、切比雪夫Ⅰ型滤波效果较好;切比雪夫Ⅱ型稍差一些;开尔文和equiripple滤波效果最差,尚留有低频潮位信息。因此真实海况下GPS RTK测量的观测的水面高程数据中的波浪信息的提取建议采用椭圆、巴特沃斯或切比雪夫Ⅰ型带通滤波器。
3 结束语
仿真结果表明,基于近岸GPS RTK技术测量的水面载体高程数据,通过预置的低通和带通滤波后可提取出潮位和波浪信息,进而开展潮位和波浪的计算,最终完成潮位和波浪的同步观测。
由于GPS RTK方法测量潮位和波浪的核心是GPS双差技术[8-9],受到解算距离和通信链路的限制,这种方式的作用范围比较有限,适用于近海地区,所以对于近岸的潮位和波浪测量实用价值非常高。
[1]李浩,肖付民,夏伟,等.GPS浮标高程数据滤波窗函数选取方法[J].海洋测绘,2012,30(6):10-12.
[2]柴洪洲,崔岳.GPS动态定位实现厘米级海平面检测的研究[J].全球定位系统,2001,26(3):18-21.
[3]张锁平,齐占辉.GPS测波技术分析与初步实验研究[J].海洋技术,2010,29(3):14-18.
[4]JJ de Vries.Designing a GPS-based mini wave buoy.International ocean system[J].2007,May/June:21-23.
[5]陆洋.海洋卫星测高新概念——GPS浮标 [J].海洋技术,2000,19(4):28-33.
[6]李杰.GPS潮汐测量及应用.北京:国家海洋局第一海洋研究所,2009:19-40.
[7]阳凡林,赵建虎.GPS验潮中波浪的误差分析和消除[J].海洋测绘,2003,23(3):1-4.
[8]冯义楷,李杰,杨龙,等.远程GPS验潮方法研究[J].海洋测绘,2010,30(1):4-6.
[9]Teruyuki Kato,Yukihiro Terada,Masao Kinoshita,etc.Realtime observation of tsunami by RTK-GPS[J].Earth Planets Space,2000(52):841-845.
[10]王生辉.GPS RTK技术在电力线路测量中的应用[J].陕西电力,2007(9):49-51.
[11]王葵,翟荣刚,王道斌,等.基于激光测距雷达和车载GPS的动态障碍物检测[J].工业仪表与自动化装置,2013(2): 10-13,18.
Research on algorithms of tide and wave extraction based on off-shore GPS RTK technology
DANG Chao-qun,QI Zhan-hui,LI Ming-bing,ZHAO Jiang-tao
(National Ocean Technology Center,Tianjin300112,China)
In order to achieve the extraction of tide and wave information,we simulated the real-time sea level altitude data which measured by GPS RTK technology.As the period cycle of which had a wide difference,it was not complicated to extract tide and wave information from the simulation data by the way of corresponding low pass and band pass filter.After executing and analyzing the low pass filter of moving average,median,wavelet and the band pass filter of elliptic,Butterworth,it was general summarized as follows.(1)The technology of off-shore GPS RTK could be simultaneously applied to the measurement of tide and wave;(2)Low pass filter of moving average,median,wavelet performed well on extracting tide information from simulation data.In the beginning,Empirical Mode Decomposition(EMD)had a poor performance,afterwards,it became well.As a whole,median performed worst;(3)Band pass filter of elliptic,Butterworth,first type of Chebyshev performed well on extracting wave information from simulation data,second type of Chebyshev had a poor performance,as a whole,equiripple and Kelvin performed worst.
GPS RTK;tide and wave information extraction;algorithms of filtering;simulation
TP391
A
1674-6236(2016)02-0006-03
2015-07-09稿件编号:201507073
国家自然科学基金(41406114);天津市自然科学基金项目(13JCQNJC03800;12JCQNJC02400)
党超群(1987—),男,安徽砀山人,硕士研究生,助理工程师。研究方向:海洋观测技术。
猜你喜欢
武汉理工大学学报(交通科学与工程版)(2022年4期)2022-09-07
学苑创造·A版(2022年4期)2022-06-18
港工技术(2022年2期)2022-05-12
声学与电子工程(2021年2期)2021-07-26
河北地质(2021年1期)2021-07-21
当代陕西(2020年24期)2020-02-01
水利水电快报(2019年2期)2019-03-08
小哥白尼(趣味科学)(2018年12期)2018-12-18
电子制作(2017年1期)2017-05-17
电测与仪表(2016年15期)2016-04-12
