基于单片机的电动摩托车无刷直流电机控制系统的设计
2016-09-12 02:35:06马洪雨帕孜来马合木提
电子设计工程 2016年4期
马洪雨,帕孜来·马合木提,李 倩
(1.新疆大学新疆 乌鲁木齐 870047;2.北京大学 北京 100871)
基于单片机的电动摩托车无刷直流电机控制系统的设计
马洪雨1,帕孜来·马合木提1,李 倩2
(1.新疆大学新疆 乌鲁木齐 870047;2.北京大学 北京 100871)
根据无刷直流电机的工作原理,设计了以PICl6F737单片机为核心的电动摩托车无刷直流电动机控制系统,给出了控制系统的硬件组成和软件设计方法,可以实现调速、限速、定速功能,保护及辅助功能完善。通过对控制系统的静态和动态调试表明系统性能良好,满足设计要求,具有广泛的现实意义。
电动摩托车;PIC16F737;无刷直流电机;PID控制
环境污染的不断加剧和能源供应的日益紧缺[1-2],电动摩托车作为代用燃料、使用新型能源的交通工具出现了并且逐。无刷直流电机是电动摩托车的主要部件,以其结构简单、运行可靠、功率密度高、低转速,输出转矩大等特点得到了广泛应用[3-4]。根据无刷直流电机的工作原理,设计了一种以PIC16F737单片机为控制核心的电动摩托车无刷直流电机控制系统,给出了系统详细的硬件电路和软件设计方法。
1 技术要求及设计原理
技术要求:本文所设计的电动摩托车控制系统中的无刷直流电机额定电压为48 V,额定功率为1 000 W,额定转速为3 000 r/min,额定转矩为1.6 N*m。速度实现方面具有调速、限速和巡航功能;保护方面具有柔性刹车、过流(堵转)保护、欠压保护和防盗保护等。
系统设计原理框图如图1所示。
系统以单片机为核心可分为:
1)控制核心单片机、+5 V电源电路及辅助电路组成。
2)驱动电路和逆变电路。
3)速度转把、制动手柄信号及检测电路。
4)保护电路及辅助功能性电路。
控制系统是由单片机依据转速把信号、电机转子位置信号和电流反馈信号输出对应的波,通过驱动芯片,控制由六个功率场效应管的组成的三相全桥驱动电路[5],从而对电机进行控制。如有异常信号发生,控制系统会产生相应保护动作。
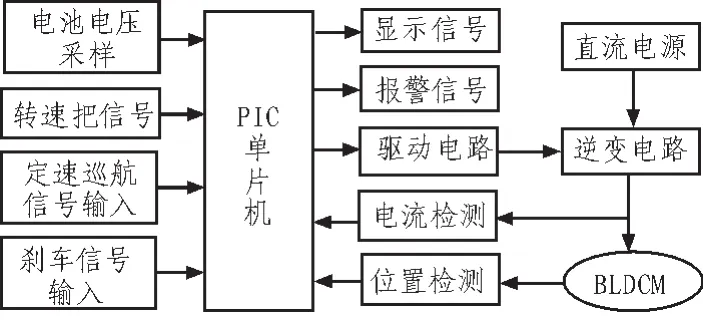
图1 系统的原理框图Fig.1 Block diagram of the system
无刷直流电机是由电机本体、转子位置检测器和电子开关电路三者协同工作的过程,其工作原理如图2所示。

图2 无刷直流电机工作原理图Fig.2 Block diagram of brushless DC motor
电机通电后,带电的某一相的定子绕组形成的电流就会与转子的磁场作用产生转矩,由此驱动转子运动,此时,转子位置传感器检测到转子磁钢位置(处于变化状态),通过逻辑变换,产生驱动信号控制功率管的通断,电枢绕组逐步通电,这样就可以在定子上产生旋转磁场,推动定子旋转。
综合比较无刷直流电机的连接方式可知三相全桥星形连接的综合性能最好。此外,最为常见的工作方式也是两相导通星形三相六状态[4-5]。文中电动摩托车无刷直流电机采用PWM控制策略,转速电流双闭环控制。
2 控制系统的关键硬件设计
1)单片机主控电路是整个控制系统的核心。其中单片机的各个接口连接如图3所示。
2)检测电路包括位置检测电路、电流检测电路、转速限速刹车信号检测和定速巡航信号检测。
位置检测电路是通过电机自身安装的霍尔元件实现检测功能的[7-8],上拉电阻将输出信号处理后得到方波信号(高低电平),该信号送至单片机的引脚作为控制依据。

图3 单片机外接口电路Fig.3 External interface circuit of Microcontroller
电流检测是通过分流电阻法实现的,电路由两个运算放大器组成。所得到的信号是电压信号,该电压信号与电流是成正比的。
3)逆变电路选用多个并联驱动的三相全桥控制方案,下桥臂按周期轮流导通,上桥臂采用PWM控制,通过驱动芯片分别驱动三相逆变电路中的6个功率开关管。
4)辅助电路包括过流保护电路、欠压保护电流以及报警电路等辅助性功能电路。
3 控制系统的软件设计
本系统结合PIC单片机的特点,在集成开发环境MPLAB IDE中完成的,使用C语言编程,包括主程序模块和中断服务程序模块。
主程序主要完成初始化、电机的驱动、巡航等实时性要求比较低的流程,目的是负责各模块间资源的任务调度。其中,初始化主要是完成系统、变量和寄存器、外围模块的初始化;电机驱动程序包括转子位置检测模块、转速计算模块[9]、速度调节模块、电流采样模块、电流调节模块等,主程序流程图和电机驱动流程图分别如图4和图5所示。
中断子程序主要完成一些实时性要求都非常高的任务,主要完成系统的保护功能,如刹车、过流保护、欠压保护等保护模块。中断服务子程序由各功能模块的相应中断源提出申请,CPU实时响应。
中断服务程序主要是完成一些实时性要求高的功能[6],本系统的中断服务程序主要是针对保护功能设计的,主要包括:过流及欠压保护模块、刹车模块等。

图4 主流程图Fig.4 MainFlow chart of the software design
4 控制系统的调试
1)通过测试各个阶段波形(起步阶段、起步加速阶段、低速稳定阶段、再加速阶段、中速稳定状态、高速运行状态)表明系统启动平稳,能够实现电压电流波形对称[10],转矩脉动和开关损耗很小。
2)测得10组电机性能数据,根据与计算所得理想数据比较可得系统系统可靠性强,能够实现快速、精准的调速。
3)通过对样车的实际操作和骑行检测,表明系统运行状态良好,保护措施严谨。
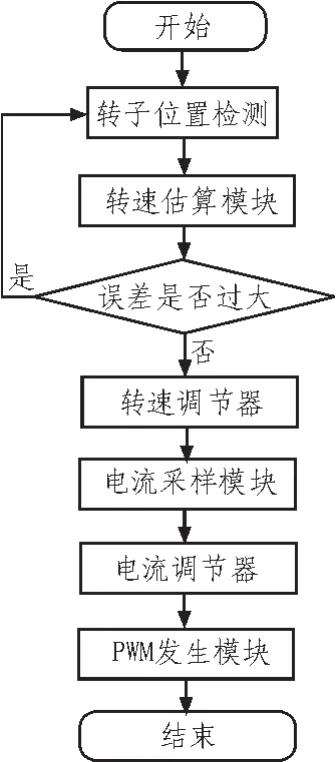
图5 电机驱动流程图Fig.5 Flow chart of the motor driving
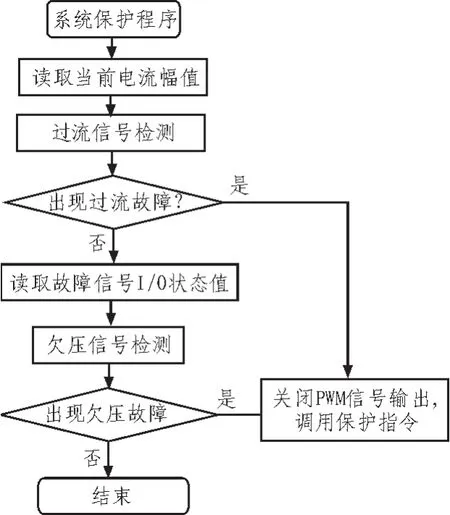
图6 中断服务程序流程图Fig.6 Flow chart of interrupt service program
5 结束语
该系统硬件设计采用以PIC16F737为控制核心的直流无刷电机控制系统,软件部分以模块化为设计原则,提高了控制系统的高可靠性和高智能化。通过对试验样车进行理论和实际的测试,表明整个控制系统设计简洁、操作准确、稳定可靠、现场运行良好等特点,达到了设计要求。
[1]劳力.动力蓄电池管理系统SOC算法研究[D].北京:北京交通大学,2005.
[2]陈清泉,詹宜居.21世纪的绿色交通工具—电动车[M].北京:清华大学出版社,2000.
[3]叶金虎,徐思海,崔海大.无刷直流电动机[M].北京:科学出版社,1982.
[4]孙广星.无位置传感器无刷直流电机控制系统研究[D].湖北:华中科技大学,2007.
[5]杨光.电动车无刷直流电机无位置传感器控制研究[D].天津:天津大学硕士,2008.
[6]刘铮.基于的电动自行车控制器[D].天津:天津大学,2007.
[7]钟晓伟,宋蛰存,许刚.电动自行车用无刷直流电机控制系统设计[J].电机与控制应用,2011,38(1):20-24.
[8]李胤昌,郑日荣.基于单片机的电动自行车控制系统设计[J].现代电子技术,2009,32(8):136-138.
[9]徐拥军,谢书鸿,栗鸣,等.基于OPPC的温度和应力光纤光栅传感技术[J].供用电,2013(2):40-45.
[10]王亮,王文策,程斌,等.基于Simulink的发电机励磁系统整流单元的建模与仿真[J].陕西电力,2011(7):25-28.
Design of brushless DC motor control system for electric motorcycle based on PIC
MA Hong-yu1,PAZILAT Mahemuti1,LI Qian2
(1.XinjiangUniversity,Urumqi 830047,China;2.Peking University,Beijing 100871,China)
According to the controlling strategy of BLDCM,a brushless DC motorof electric motorcycle control system based on PIC16F737 microcontroller was designed,a detail ofhardware circuit andsoftware design methods were given,This system can realize regulation speed,speed limit and stationary speed and has perfect function of protection and assistance.Static and dynamic test of the control system were completed.Experiments show that the control system has a good performance,meet the requirements,the devise have definite practical value.
electric motorcycle;PIC16F737;BLDCM;PID control
TN710
A
1674-6236(2016)04-0168-03
2015-03-25 稿件编号:201503354
马洪雨(1986—),男,吉林延吉人,硕士研究生。研究方向:过程检测、诊断与控制技术。
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
小读者(2021年2期)2021-03-29 05:03:20
电子制作(2019年13期)2020-01-14 03:15:28
电子制作(2019年15期)2019-08-27 01:12:10
电子制作(2019年9期)2019-05-30 09:42:02
汽车观察(2018年10期)2018-11-06 07:05:28
车迷(2017年10期)2018-01-18 02:10:46
北京汽车(2017年3期)2017-10-14 02:15:52
电子制作(2017年1期)2017-05-17 03:54:12
淮南师范学院学报(2015年3期)2015-03-22 01:16:17