
多模式视频监控系统在武器试飞中的应用
2016-09-12 02:34李南伯李天志
电子设计工程 2016年4期
李南伯,李天志,汪 洋
(中航工业成都飞机工业(集团)有限责任公司 四川 成都 610092)
多模式视频监控系统在武器试飞中的应用
李南伯,李天志,汪 洋
(中航工业成都飞机工业(集团)有限责任公司 四川 成都 610092)
随着技术的进步,以常规视频监控系统、吊舱视频监控系统、伴飞摄像监控系统为主体构架的多模式视频监控系统逐渐完善,在阐述了各子系统在某型机的武器投放试飞中应用及技术难点后,分析了目前多模式视频监控系统存在的弊端,并提出了改进方向。
多模式视频监控;多路视频采集记录器;吊舱;伴飞摄像
随着技术的进步,视频监控[1]作为飞机科研试飞的重要手段,在多年的科研试飞过程中,已经得到了长足的发展,衍化出的多种监控模式在各种试飞领域都有着广泛的应用,成为保障试飞安全有力的安全之锁,并为各种科目试飞提供重要的试飞数据和判断素材。
在某型机的武器投放试飞科目中,运用了多种视频监控模式,形成有效的可视化监控网络,覆盖了武器试飞的全过程,成为了安全试飞的有利保障并为试飞决策提供了重要依据。
1 常规视频监控系统
1.1 常规视频监控系统在试飞中的应用
目前常规视频监控系统的核心主要通过加装的机载多路视频采集记录器,采集机上实时的一路屏显、三路下显信号以及加装在座舱的摄像头传来的告警面板信号,将这些视频信号通过合并、压缩、转化,成为一路PCM信号,从而实现遥测监控[2]。多模式视频监控体系如图1所示。
1.2 常规视频监控系统的技术要点
常规视频监控系统主要由安装于待测飞机上的多路视频采集记录器以及安装于地面监控大厅的实时图像数据管理系统组成,地面的实时图像数据管理系统包括有安装于前端服务器的接收解调软件、视频流管理软件和处理后图像的实时显示软件。
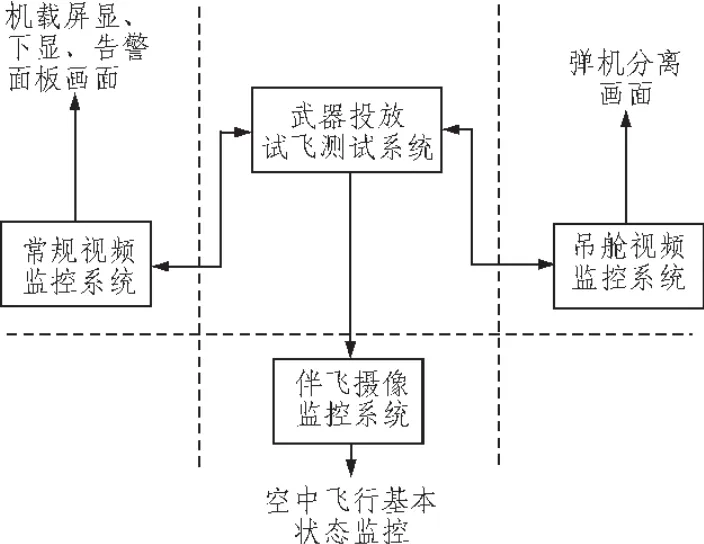
图1 多模式视频监控体系Fig.1 Multi-mode video monitoring system
安装于机载的多路视频采集记录器通过分布于飞机各处的采集节点,将所需要采集的视频、语音、标准时码信息等信号统一采集,并将采集节点所提供的模拟语音视频转换成数字语音视频,之后对数据进行统一的压缩处理,并将压缩后的数据流一分为二,其中一路转换成PCM制式并遥测发送给地面站接收 (这路信号可以如传统PCM信号一样选择帧率进行发送);另外一路则直接进入该设备的记录模块进行100%数据的记录。而多路视频采集记录器所采集的标准时码信息则给所采集到的每一帧画面都打上时间标签,以便地面的图像显示软件进行解调与分析,从而实现所采集的每帧图像和机载其他设备所采集的数据处于同一时间格式下,以便实时监控和事后的数据分析。
飞机上所采集的影像数据通过该设备的PCM输出模块与机载其他采集设备所采集输出的PCM数据一起通过统一的遥测设备,将数据发送出去,经由地面遥测接收机,将接收到的影像数据传输到有接收解调功能的前端服务器进行处理,之后以固定的数据格式将解调后的影像数据通过以态网将影像数据发包到各个有监控需要的监控终端,监控终端通过影像实时显示软件,把机载影像实时还原出来,让试飞工程师对所收到的数据进行实时监控与分析。
而机载多路视频采集记录器将所采集的影像数据在本机的记录介质上加以保存,试飞任务结束后,也可以通过快卸工具,将记录下来的所有数据通过地面软件加以还原,供试飞工程师对当日的试飞影像数据进行详细处理与分析。
安装于前端服务器上的软件是用于将PCM的原码提供给视频流服务器。首先把接收到的遥测数据解调成为三同步数据(即位同步、字同步、帧同步数据)。之后将解调出的数据的格式转换成视频流服务器上的视频流管理软件所能解读的数据格式,并以内存共享的方式将数据提供给视频流服务器软件。
视频流管理软件在接收到前端服务器所共享的数据之后,将所收到的信息重新组成一个PCM全帧,对该帧数据进行分析处理,从PCM全帧数据中提取并还原出校验正确的视频数据帧及VGA格式的影像数据帧,然后以组播的方式通过以太网把数据发送到网络上所有的监控终端。常规视频监控体系构架如图2所示。

图2 常规视频监控体系Fig.2 Conventional video monitoring system
2 高速摄像系统
高速摄像系统主要用于监控武器投放科目试飞中[3],导弹与机身的分离情况,保障试飞安全,并为飞机和导弹设计部门提供弹机分离后轨迹的第一手资料。并且,通过非接触式的,基于多帧图像的精确测算与运动测量方法,在与武器系统互不交联、独立于武器发射过程之外的状态下,获取的弹机分离影像数据,之后运用机翼变形测量试飞三维运动姿态分析系统,对外挂武器的投放初始状态及发射过程中的机翼变形量的分析。导弹发射后标志显示如图3所示。
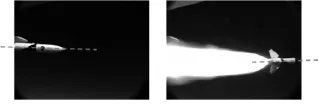
图3 导弹发射后标志显示Fig.3 Indication after the missile launch
2.1 飞机改装与武器安装方案
如图4所示,在飞机机身下方固定连接一个安装有两台高速摄像机的定制吊舱,考虑到机载外挂武器发射过程的测量区域需要较大的可视空间,因此,两台高速摄像机的布置视场应略有不同。根据机体与吊舱空间视场的实际情况,摄像机的拍摄视场应适用于6 m×6 m。并实际视场状态(光线、距离等),选择适合的相机镜头,视场大小可在试飞之前调至最佳。武器通过挂梁固连机翼下方,在武器上刻绘有“十”字丝或其它标志作为被测标识点。在飞机起降两个过程的前后,需对高速摄像机进行标定,记录下在飞机起降与科目试飞集中种状态下,两台高速摄像机同时记录的包含被测标识点在内的影像像,对影像进行数据处理,从而获取外挂武器在投放发射阶段的三维运动姿态 [4]。考虑到高空的温度情况,吊舱内部应采取相应的加热保温措施,以保障高速摄像机可以正常运行。外挂武器表面所粘贴或喷涂的事后分析用标志点的形状和布置位置则需格局实际情况完成。
2.2 试飞中的应用与分析
在武器投放试飞过程中,将高速摄像机的拍摄帧数设置为100,即每秒钟将捕捉 100幅图像,以目前高速摄像机的记录容量,可持续记录40秒钟的高速运动画面。当试飞飞机进入武器投放区域后,由飞行员触发安装于座舱内的触发开关,然后进行武器投放,以保证可以拍摄到武器投放的全过程。
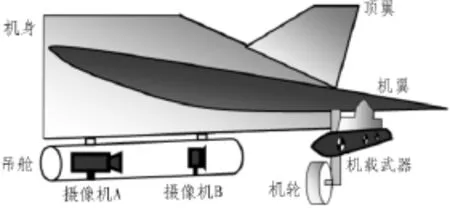
图4 摄像机布置Fig.4 Camera arrangement
对外挂吊舱中的高速摄像机所拍摄的数据进行100%无损记录,试飞结束后使用专用软件进行数据分析处理,从而获取了机翼携带并且伴随飞机一起运动的机载外挂武器挂飞与投放过程中的武器三维运动姿态参数。
在飞机起降过程的前后分别对所使用的高速摄像机进行标定,获取高速摄像机的标定参数数据。在试飞过程中高速摄像机完整记录包含被测外挂武器标识点在内的所有影像,并将拍摄到的影像按照拍摄顺序存储在影像像采集卡里。试飞任务结束后,将影像采集卡中的顺序影像数据下载到数据处理计算机中进行影像处理,分析处理后即可得到机载外挂武器在挂飞于投放的整个试飞过程中的三向位移、姿态(俯仰角/滚转角/偏航角)等参数。
专用的影像数据处理软件系统框图如图5所示,包括有试验任务管理模块、序列图像回放模块、摄像机标定模块、图像特征提取[5]模块、武器三维位置姿态计算[6]模块、武器三维运动速度/加速度计算模块及结果三维动画显示模块等模块在内。
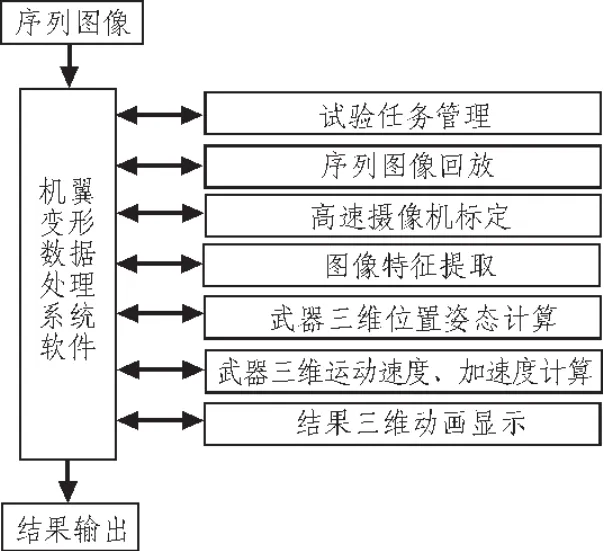
图5 数据处理软件系统框图Fig.5 Data processing software system
3 伴飞摄像监控系统
目前,国内的伴飞摄像一般通过人工观测到目标后,再实现对目标的人工拍摄,但是人工观测的距离有限,人工拍摄角度不易把握,使得视频捕获灵活性低,稳定性差,采集的视频数据可观性不强,不能满足设计部门、飞行试验部门和飞行员的分析要求。自动跟踪技术是国内外视觉监控领域研究的难点和热点之一。
3.1 伴飞摄像系统解决技术难点
首先,在伴飞摄像系统中采用手动锁定模式,锁定需要跟踪的目标,并将目标信息送到自动跟模块。在自动跟踪模块中,利用背景差分法实时捕获目标信息,从而实现自动跟踪。背景差分法是目前运用在移动目标的跟踪检测领域中较为常用的一种方法,该方法以实时图像和背景图像为基础素材,以二者差分计算的结果来检测运动区域,将背景前景图像的灰度提取作差,从而保证可以较为完整的提取目标。但这种背景差分法[7]对光照、天气等外部环境条件的变化较为敏感,不能完全用于伴飞摄像系统对空中拍摄的要求。经过研究,采用中值背景模型实时更新背景信息。在伴飞摄像系统中,在建立背景模型的过程中采用四角筛选式中值计算法,并且在计算过程中,间隔30秒刷新一次背景图像。将手动锁定目标的时间点定义为零时刻t0,从t0时刻开始计算,选取第1,3,5帧图像,使用四角筛选式中值法对已选取的三帧图像进行计算,并且从t0+n×30秒(n为自然数)的时间点开始,再选取第1,3,5帧图像,使用四角筛选式中值法对选取的三帧图像再次进行计算,这样即是每间隔30秒钟进行一次四角筛选式中值计算,实现背景图像达到每30秒一次的刷新率。如图6所示。

图6 背景提取示意图Fig.6 Schematic diagram of background extraction
其次,将自动跟踪技术[8]应用到伴飞摄像系统,除了获取目标的即时位置的动态坐标信息外,还需要将被跟踪目标的目前所在方位的空间坐标信息输入到PID控制器中。PID控制器得到被跟踪目标的坐标信息(x,y)后,和当前摄像机瞄准的坐标(x0,y0)进行实时差分,计算出x方向与y方向的偏移量,如式(1)和式(2)所示。

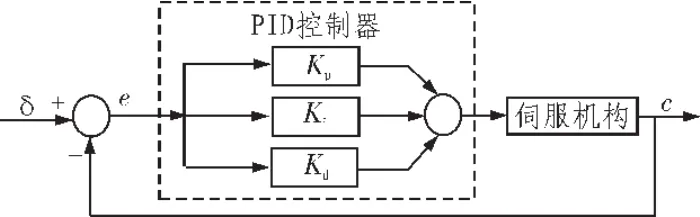
图7 PID控制系统结构框图Fig.7 PID control system diagram
在伴飞摄像系统中,控制系统的伺服机构控制器采用了PID控制律,PID即比例(Proportional)、积分(Integral)、微分(Derivative)控制,PID控制是一种基于过去、现在和未来三系时间坐标所属信息对比得出的控制算法,具有较强的鲁棒性。其控制系统结构图如图7所示,PID控制系统主要包含PID控制器和被控对象两部分。PID控制器是利用比例、积分和微分的方法对定值与实际值的偏差进行运算,并通过线性组合的方式,完成控制量对被控对象进行控制。
3.2 伴飞摄像系统的应用
在成功的解决通过基于背景差分法提取目标及PID (Proportional Integral Derivative)伺服机构控制系统的关键技术问题后,将自动跟踪技术应用到伴飞摄像中,有效的解决了视频目标捕获的灵活性及稳定性问题。伴飞摄像系统实现框图如图8所示。
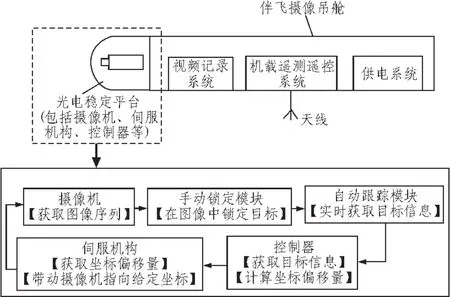
图8 伴飞摄像系统实现框图Fig.8 Schematic diagram of co-flight video recording
由此开发的伴飞摄像系统也成功的应用到了武器投放试飞中。在武器投放试飞中,由伴飞飞机携带伴飞吊舱,全程拍摄试飞飞机的整体和局部画面,并将影像数据传送回地面监控大厅,使在监控大厅中的试飞指挥员、试飞工程师等可以综合其它的机载遥测试飞数据,更加全面的了解试飞飞机在整个试飞过程中的起飞着落、空中姿态、空中对靶场的瞰视全景、弹机安全分离全过程、导弹命中等试飞要素。
4 结 论
以常规视频监控、吊舱视频监控、伴飞摄像监控为主体的多模式视频监控系统在武器试飞以及常规科研试飞中已得到了广泛的应用。为可视化试飞体系的构建建立了良好的基础。目前的多模式视频监控系统还存在一些缺点,如受传输带宽限制,遥测监控视频画面质量不稳定;数据存储量大,数据下载时间较长;控制环节较多,需要操作人员较多等缺点。随着试飞需求的进一步提高,测试技术的进步,视频监控体系也迎来了二次发展的机会,在不久的将来,网络化将应用到全新一代视频采集设备中,地面模拟驱动还原技术,分流多点遥测技术,小型化存储阵列技术,等也将逐步应用在视频监控体系之中,以改善监控质量,提高效率,提升试飞基地的整体试飞监控能力。
[1]张建琳.试飞监控与指挥系统的建立及应用[J].测控技术,2004,23(9):27-30.
[2]李相国,李士丽.试飞遥测显示监控系统[C]//2013年首届中国航空科学技术大会论文集,2013.
[3]苏曾立.高速摄像系统及其在靶场中的应用分析[J].飞行器测控学报,2003(4):267-270.
[4]阮娟.机载导弹传递对准匹配方案研究[J].弹箭与制导学报,1998(5):57-60.
[5]杨杰.一种移动机器人视觉图像特征提取及分割方法[J].机器人,2008,36(1):227-234.
[6]唐自力.单站光测图像确定空间目标三维姿态[J].光子学报,2004,33(12):48.
[7]李林,卢焕章.基于分级自适应背景差分的运动目标检测[J].电视技术,2013,40(8):34-39.
[8]郑岩,谭庆昌,王树范.车载火控系统自动跟踪的卡尔曼滤波[J].红外与激光工程,2010,39(2):230-233.
The application of multi-mode video monitoring system in weapon test
LI Nan-bo,LI Tian-zhi,WANG Yang
(Flight Test Center of Avic Chengdu Aircraft Industrial(Group)Co.,LTD,Chengdu 610092,China)
With the progress of technology,in this thesis,a multiple video monitoring system was formed based on legacy video monitoring,suspended cabin video monitoring and co-flight video monitoring,in each subsystem in weapons delivery flight test in the application of a certain type of machine and the technical difficulties,analysis of the current insufficiency of multi-mode video monitoring system,and proposed the improvement direction.
multiple mode video monitoring;multiple video acquisition recorder;suspension cabin;co-flight video recording
TN2
A
1674-6236(2016)04-0094-04
2015-04-02 稿件编号:201504029
李南伯(1983—),男,江西九江人,工程师。研究方向:飞行试验、试飞测试。
猜你喜欢
环球时报(2022-05-30)2022-05-30
当代陕西(2019年11期)2019-06-24
作文周刊·小学一年级版(2017年9期)2017-06-20
小哥白尼·军事科学画报(2017年3期)2017-06-12
中国公共安全(2017年11期)2017-02-06
办公自动化(2016年18期)2016-12-17
小学生导刊(低年级)(2016年8期)2016-09-24
少儿科学周刊·儿童版(2016年2期)2016-03-19
儿童故事画报·发现号趣味百科(2015年10期)2016-01-20
新闻前哨(2015年2期)2015-03-11
