
舰载机光学引导模拟训练系统设计及实现*
2016-09-09 09:21潘传勇
舰船电子工程 2016年8期
潘传勇 张 涛 黄 葵
(海军航空工程学院青岛校区 青岛 266041)
PAN Chuanyong ZHANG Tao HUANG Kui
(Navy Aeronautical Engineering Academy Qingdao Branch, Qingdao 266041)
舰载机光学引导模拟训练系统设计及实现*
潘传勇张涛黄葵
(海军航空工程学院青岛校区青岛266041)
论文利用工控机、PC104单板机、单片机等主控单元,对舰载机光学引导模拟训练系统进行设计,采用CAN总线监控网络技术、网络桥接技术和故障模拟技术,实现了舰载机光学引导系统多项模拟训练功能。
光学引导; 模拟训练系统; 设计与实现
PAN ChuanyongZHANG TaoHUANG Kui
(Navy Aeronautical Engineering Academy Qingdao Branch, Qingdao266041)
Class NumberTP391.9
1 引言
光学引导装置是舰载机着舰引导的重要组成部分,该装置具有结构复杂、自动化程度高等特点,其操作管理的复杂性和难度较高,只有通过训练有素的人员的正确使用,才能发挥出应有的作战效能。然而,高水平的使用管理人员需要一个较长的持续训练过程,由于舰艇操作管理人员具有定期的流动性,因此,如何保持和提高人员的训练质量和训练水平,是一个迫切需要解决的重要问题[1~3]。
目前,各国海军使用的训练方式及手段主要包括岸基训练和实船海上训练[4~7]。实船海上训练效果好,作用不可替代,但存在训练成本高、受外部因素影响大、承训量有限等问题,解决这些问题的有效途径是研制岸基模拟训练系统[8],本文利用现场总线和计算机技术,研制了舰载机光学引导装置模拟训练系统,满足了院校与部队新装备日常训练和技术保障的实际需要。
2 系统组成
该系统设计的出发点就是模拟实操及训练功能,能代替实际装备进行战位的操作训练,在操作方式、显示效果、界面信息等方面与实装相同,同时还具有操作流程演练、故障设置与诊断、操作示范教学、考核评定等多项功能,能够满足院校教学和部队模拟训练要求[9]。
模拟训练系统就是综合运用多种仿真技术,模拟出实际操作环境和故障现象[10~11]。本模拟训练系统包括训练管理系统、灯光控制系统、模拟场景单元三部分,如图1所示。
训练管理系统包括训练管理台和灯具驱动电路板。训练管理台通过以太网向灯光控制系统发送故障设置信息,接收并记录状态信息和操作训练信息,通过CAN总线发送灯具的故障信息,完成状态监控、故障设置考核评定等任务。灯具驱动电路板接收灯光控制系统产生灯具的控制命令和训练管理台产生的灯具故障命令,将灯具控制命令转换成模拟灯具的驱动信号,根据灯具故障命令模拟故障现象,并将灯具的状态上报给灯光控制系统。
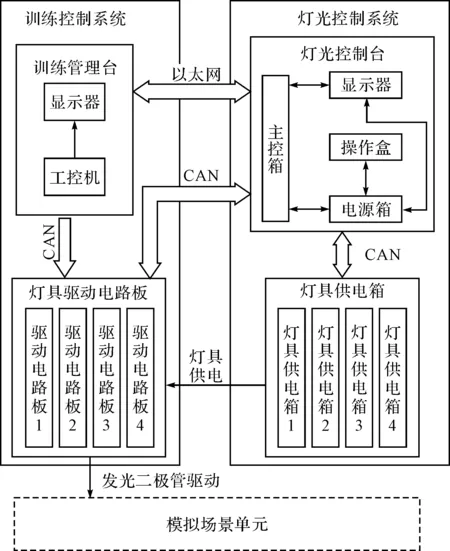
图1 模拟训练系统结构图
灯光控制系统包括灯光控制台和灯具供电箱。灯光控制台具有操作功能,采集操作信息控制灯具的亮灭并进行亮度调整,采集灯具和灯具供电箱的状态信息进行显示,接收训练管理台设定的灯光控制系统故障信息,模拟相应的故障现象,向训练管理系统发送操作信息作为考核评定依据。供电箱负责为灯具供电。灯光控制系统内部通过CAN总线进行信息传递。
模拟场景单元主要用来模拟显示灯光控制系统的操作和故障模拟效果,利用高亮度的发光二极管代替实际灯具,以降低模拟训练系统成本,减小系统占地面积。模拟场景单元实现起来相对容易,本文只讨论训练管理系统和灯光控制系统设计。
3 系统设计
3.1网络架构设计
根据仿真对象复杂程度不同,系统采用了单片机、嵌入式PC104单板计算机、工控机等多种不同类型的计算机。根据不同通信要求,将模拟系统的网络分为两类。第一类为100Mbps以太网,由训练管理台、灯光控制台组成,可以提高仿真数据和逻辑指令等信息的传输速度,实现大容量的通信。第二类是总线拓扑结构的CAN网络,训练管理台、灯光控制台中带CAN接口的I/O板卡和供电箱、灯具驱动电路板则组成CAN现场监控网络,实现灯具控制指令和状态信息的实时传输,既满足系统对通信速度的要求,又便于单片机系统的硬件实现。整个系统的网络结构为两级异构网络。如图2所示。
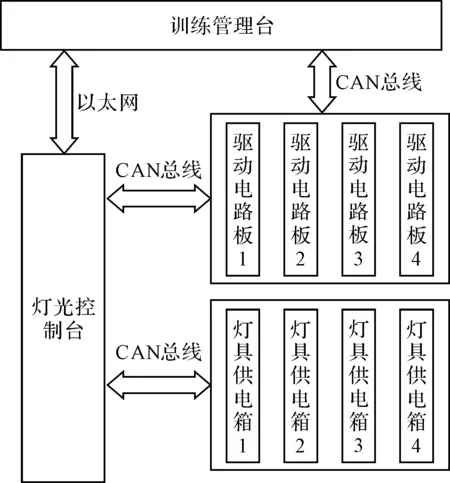
图2 模拟训练系统网络架构
3.2训练管理系统设计
3.2.1训练管理台设计
训练管理台主要与灯光控制台和灯具驱动电路板进行信息交换,通过以太网向灯光控制台发送控制系统故障设置信息,接收并记录操作训练信息,通过CAN总线将灯具故障信息发送给灯具转换箱,接收灯具工作状态。训练管理台与系统其它部分的信息关系如图3所示。
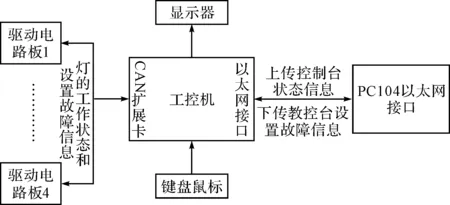
图3 训练管理台信息关系
设计训练管理台基于一台研华工控机,内置以太网卡,与灯光控制台通信;机箱内扩展一块CAN总线通信卡,与灯具驱动电路板进行通信。
3.2.2灯具驱动电路板设计
秀容月明苦笑着说:“你请她都不来,我去请,她更不来。我出门一步,都有人跟着,就算把亲兵都打发走,像贺三媳妇那些人,也会跟过来看热闹。那样,还不如不去。”
模拟训练系统中共有四块灯具驱动电路板,分担200多个发光二极管的控制任务,每块电路板的结构和功能基本相同,差别在于所驱动的发光二极管灯数量略有不同。灯具驱动电路板结构框图如图4所示,主要包括单片机、CPLD、CAN总线接口电路、发光二极管恒流驱动电路、故障模拟单元等,完成信息接收与综合、故障现象模拟、发光二极管的驱动等功能。
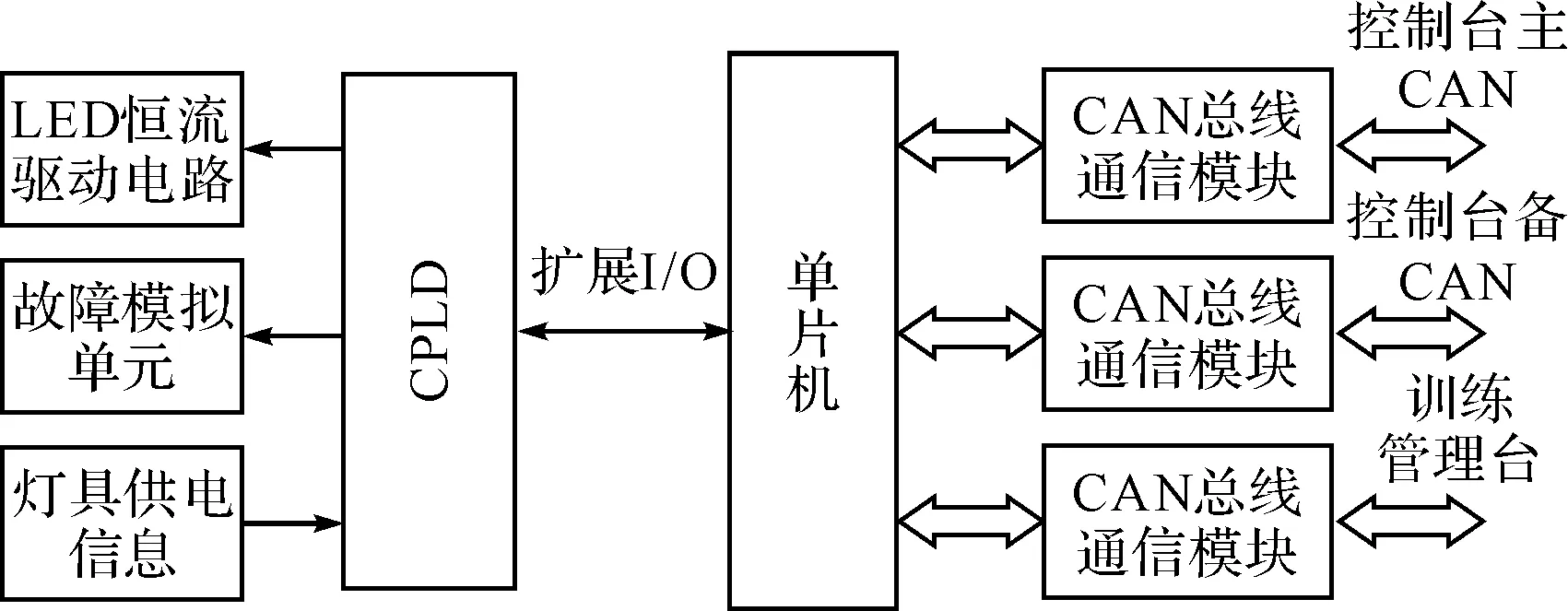
图4 灯具驱动电路板结构框图
灯具亮度的调节采用PWM波调光方式。通过调整PWM波的占空比来调节发光二极管的亮度。恒流驱动通过光电耦合器实现,设计光耦工作于线性状态,通过设定输入端串联电阻值决定发光二极管的工作电流。故障模拟单元用来模拟灯具短路和断路故障现象,实现电路如图5所示。正常工作时,短路继电器触点断开,断路继电器触点吸合。当设定断路故障时,首先使CPLD的输出变为低电平,使光电耦合器输出断开,发光二极管熄灭,然后使短路继电器常闭触点吸合,此时用万用表测量接线端1和3之间的电压值为0V,模拟出短路故障信号。当设定断路故障时,短路继电器触点断开,CPLD的输出信号保持不变,此时用万用表测量接线端1和3之间的电压值为5V,模拟出断路故障信号。
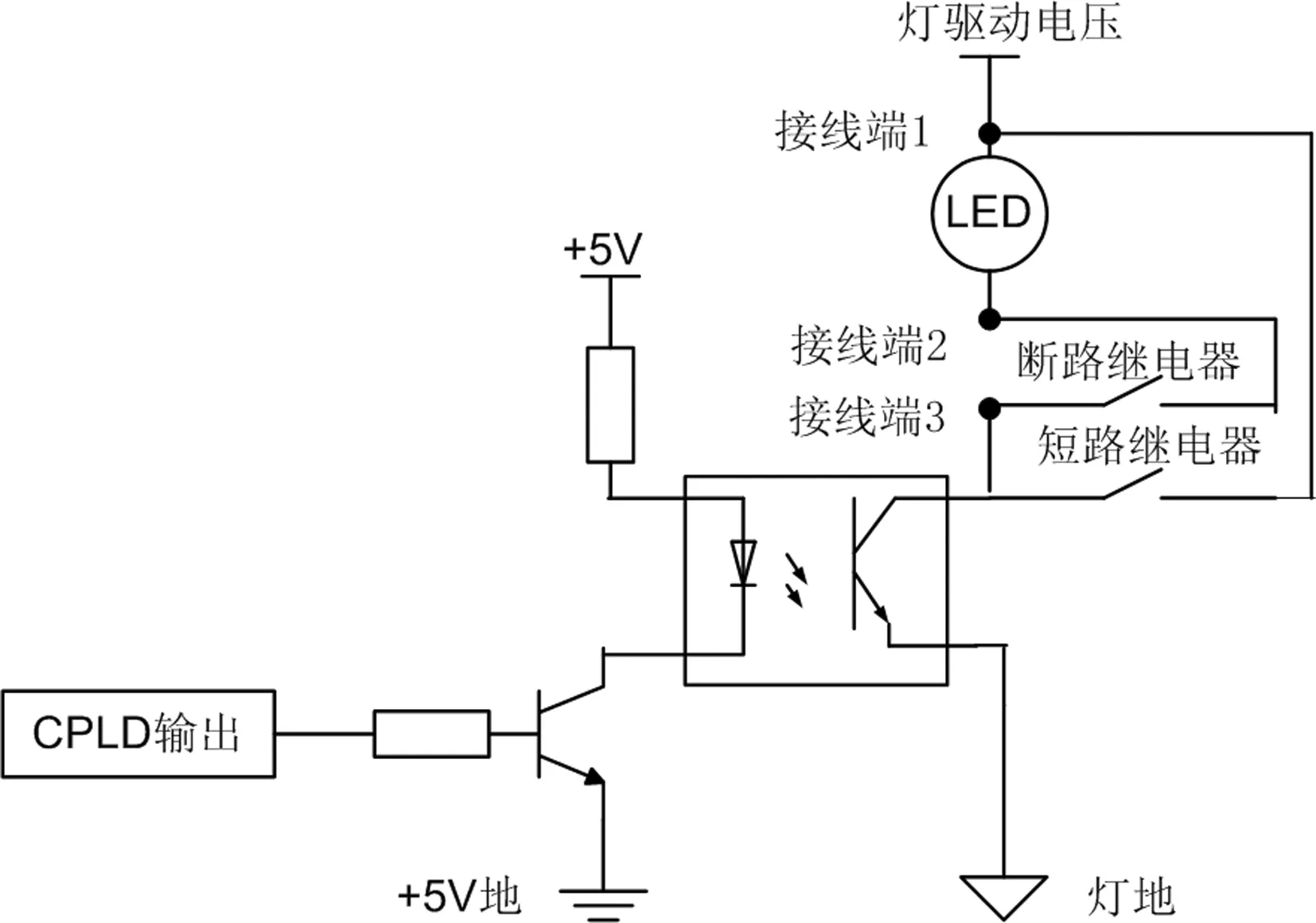
图5 故障模拟单元电路
3.3灯光控制系统设计
3.3.1灯光控制台设计
灯光控制台是灯光控制系统的控制、显示核心。主要完成系统操作状态的采集、所有灯具的亮灭和调光控制、灯具工作状态汇总、与供电箱以及灯具间的总线网络状态的监测、系统状态的显示、与训练管理台通信等功能。灯光控制台包括主控箱、显控盒、电源箱。
PC104模块和8块通信板构成主控箱。PC104模块包括PC104主机板、CAN卡、宽温高速型CF存储卡和PC104电源板。主机板集成了PS/2 键盘鼠标接口、视频输出接口、以太网接口以及串行和并行接口,在极小空间里实现PC机几乎所有的功能。由于PC104需要较稳定的电源,配备PC104系统专用的电源板,输入电源范围为7V~30V,输出为稳定的5V,保证系统稳定可靠地运行。通过扩展CAN卡,实现PC104模块和主控箱中的通信板及显控盒进行通信。
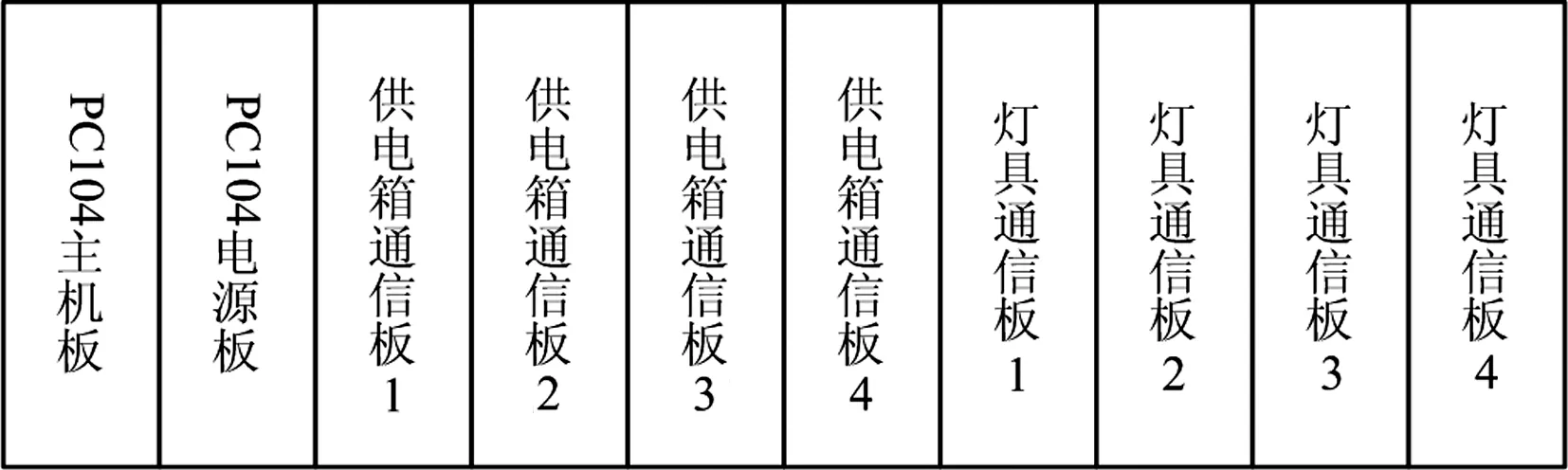
图6 主控箱组成框图
显控盒的核心是显控电路板,显控电路板完成从操作面板上读取控制命令,并对操作面板上的工作状态指示灯以及鸣音器送驱动信号的任务。显控电路板的主控芯片采用单片机,辅以各种I/O接口电路完成系统功能,其组成原理图如图7所示。
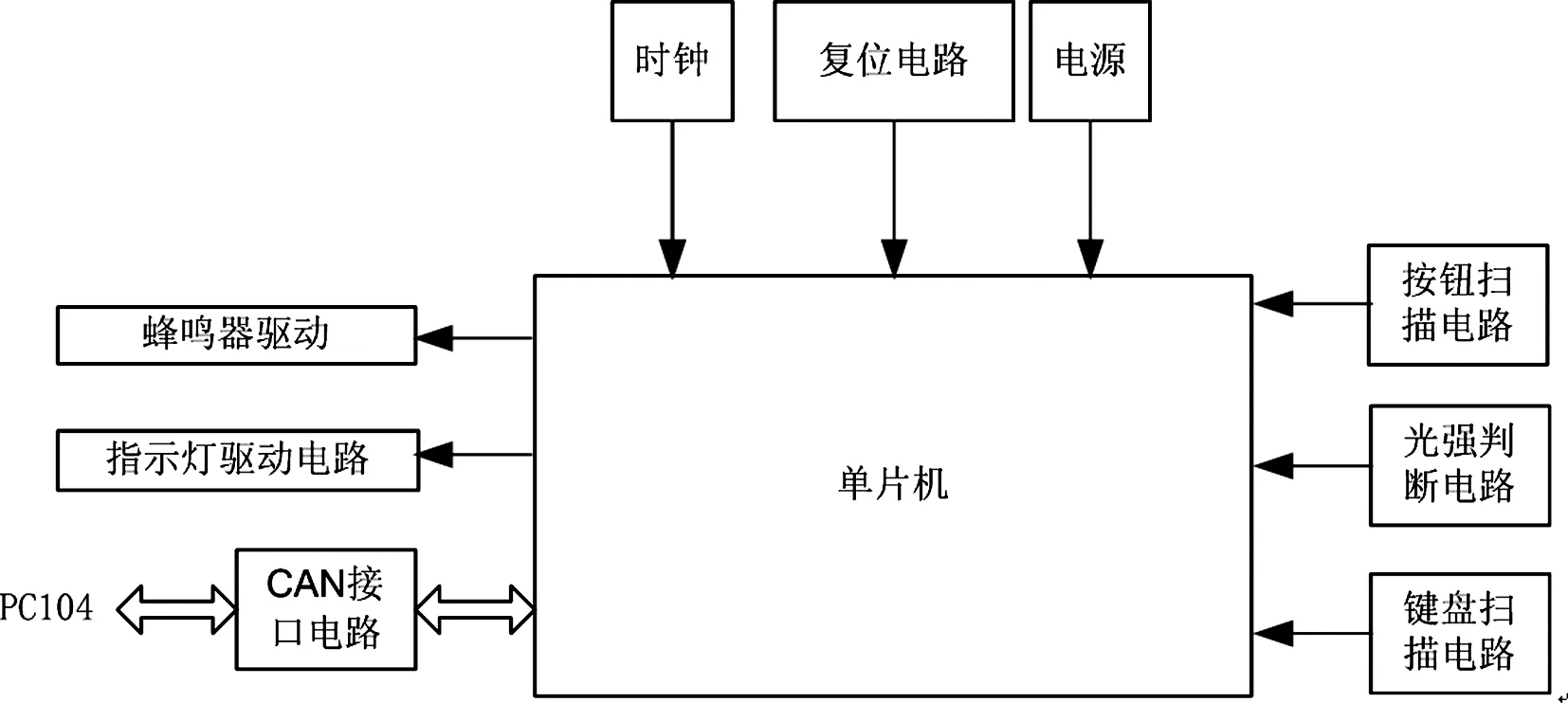
图7 显控电路板组成框图
电源单元主要由一个大功率的开关电源组成,输入交流220V、50Hz电源,输出5V、15A和24V、5A两种电压等级的直流电,为显控盒、主控箱供电。同时为显示器、控制台风机提供交流电源。
3.3.2供电箱设计
供电箱通过CAN总线接收通信板转发PC104的控制指令,将220V交流电送到灯具驱动电路板,提供灯具的供电信号。供电箱的主控板电路也是一个基于单片机控制的系统,其硬件电路框图如图8所示。直流电源单元将交流220V电源转换成直流5V,给单片机供电,单片机读入控制命令后,输出灯具驱动信号,控制灯具驱动电路为灯具供电。供电检测电路将检测到灯具供电状态发给单片机,单片机通过CAN总线上传给PC104单板机。
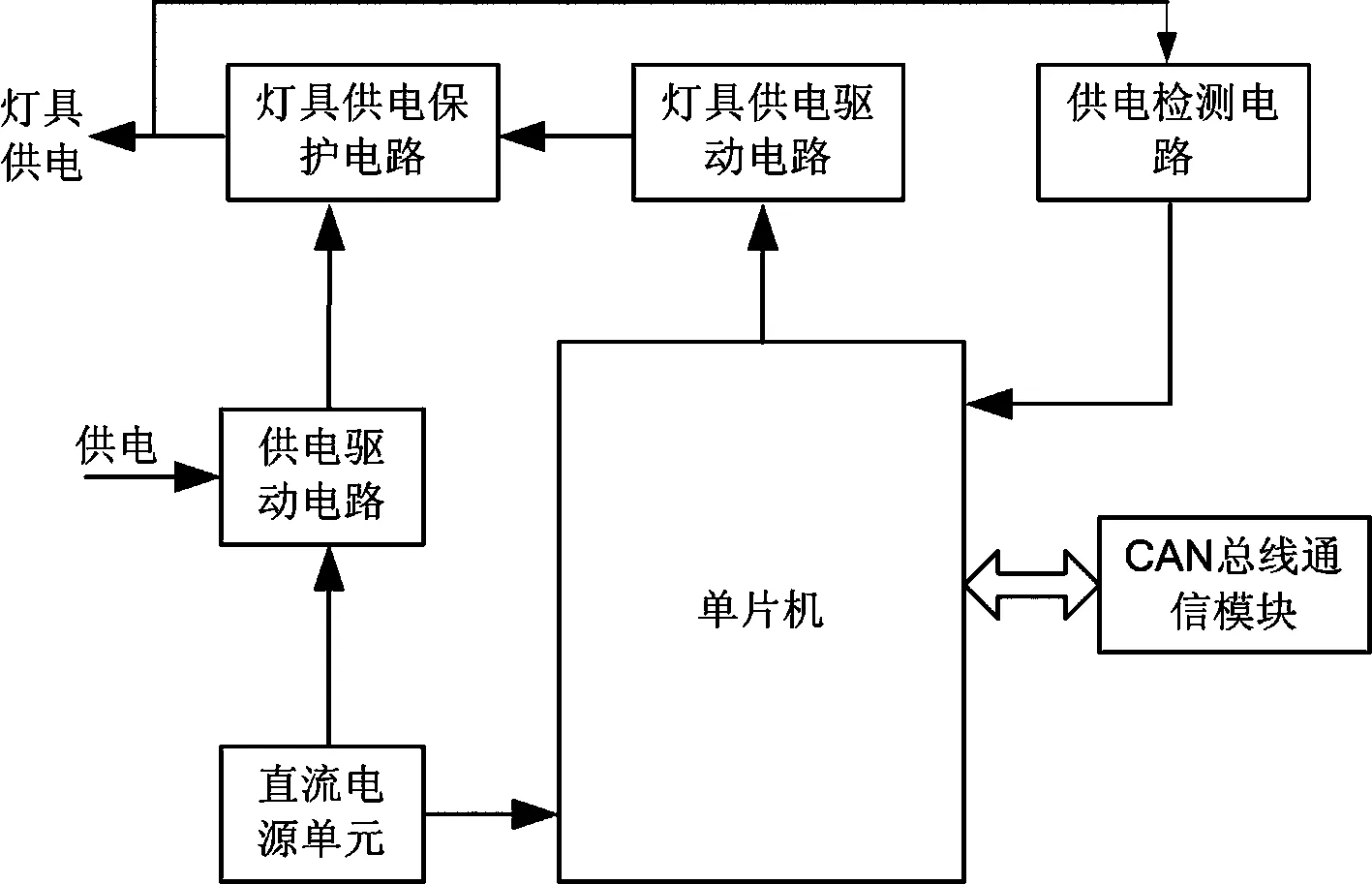
图8 供电箱硬件原理框图
针对所设计的硬件架构,编写训练管理台、灯光控制台、通信电路板、供电箱、灯具驱动电路板软件,实现舰载机光学引导模拟训练系统的装置操作、流程演练、故障设置与诊断、操作示范教学、考核评定等多项功能。
4 结语
本模拟训练系统用实物仿真与模拟场景相结合的方式,利用CAN总线监控网络技术、网络桥接技术和故障模拟技术,首次构建了集操作训练与维修训练于一体的舰载机光学引导操作维修训练平台,填补了新装备训练的空白。
[1] 曾凡明,陈于涛,胡锦晖.潜艇动力平台训练仿真系统总体设计与实践[J].中国舰船研究,2012,12(6):78-85.
[2] 程刚,倪何,曾涛,等.基于支撑平台的船舶动力模拟训练系统研制[J].系统仿真学报,2009,21(23):7460-7463.
[3] 王晓雯.集散控制手自动操作站的仿真[J].电力学报,2007,22(3):356-358.
[4] FONG K Q, HODHOD A, SAKAMOTO D, et al. Integrated machinery control system operator training tools for the Canadian Navy[C]//11th Ship Control Systems Symposium. Southampton,UK,1997:357-371.
[5] ROZMYSLOWSKI J, KUCHARZEWSKI H G, BURG J. Simulation programmes for computer based training frigate 124(SIM/CBT F124)[C]//The Sixth International Naval Engineering Conference and Exhibition.UK, 2002:295-304.
[6] CORNATON F. Training simulator for la Fayette class frigate[C]//11th Ship Control System Symposium Southampton, UK,1997:403-416.
[7] SMIERZCHALSKIR. Simulation system for marine engine control room[C]//International Biennial Baltic Electronics Conference. Tallinn, Estonia,2008:978-983.
[8] 纪凯.舰艇通信一体化模拟训练系统研究[J].舰船电子工程,2010,30(6):12-13.
[9] 余云智,程健庆,周玉芳.作战指挥自动化系统模拟训练技术研究[J].舰船电子工程,2008,28(7):118-122.
[10] 张治杰.基于VB测控装备模拟训练系统设计及实现[J].舰船电子工程,2012,32(5):12-13.
[11] 郑丽敏.人工智能与专家系统原理及其应用[M].北京:中国农业大学出版社,2004:23-25.
Design and Implementation of Carrier Plane Optical Guiding Equipment Training Simulation System*
The carrier plane optical guiding equipment training simulation system is designed based on IPC, PC104 and MCU. The system employs can bus scrutiny, network bridge, fault simulation techniques, achieves multi-functions of simulation training.
optical guiding, training simulation system, design and implementation
2016年2月11日,
2016年3月20日
潘传勇,男,硕士研究生,副教授,研究方向:舰载机引导装备。张涛,男,博士研究生,讲师,研究方向:舰面航空保障。黄葵,女,硕士研究生,副教授,研究方向:航空舰面保障。
TP391.9
10.3969/j.issn.1672-9730.2016.08.026
猜你喜欢
通信电源技术(2020年19期)2021-01-23
现代装饰(2019年10期)2019-10-17
煤气与热力(2019年1期)2019-02-14
中学科技(2018年2期)2018-03-15
IT经理世界(2017年10期)2017-05-26
电子制作(2017年23期)2017-02-02
中学科技(2016年12期)2017-01-07
中学科技(2016年11期)2017-01-07
演艺科技(2014年10期)2015-04-02
科学中国人(2015年17期)2015-01-28
