基于摄像头的直立自平衡智能车设计
2016-09-07 05:51邰玉民耿艳峰张朋举刘建帮
计算机测量与控制 2016年1期
邰玉民,耿艳峰,张朋举,潘 浩,刘建帮
(中国石油大学(华东) 信息与控制工程学院,山东 青岛 266580)
基于摄像头的直立自平衡智能车设计
邰玉民,耿艳峰,张朋举,潘浩,刘建帮
(中国石油大学(华东)信息与控制工程学院,山东 青岛266580)
设计直立行走式循迹智能车的机械及控制系统;系统选用微控制器MK60为控制核心,利用陀螺仪和加速度传感器,采用互补滤波的方法计算车体的角度和角速度,通过比例微分算法控制智能车车轮的加速度来抵消车模运动倾向,实现智能车直立;单片机通过模拟摄像头进行赛道图像捕捉,采用边沿检测算法识别赛道中心线,计算与设定值的偏差,进而控制左右两个电机产生速度差,完成智能车的转向;经测试,智能车能够在保持直立同时,完成赛道识别,且运行平稳快速。
智能车;直立控制;PID算法;路径识别
0 引言
遵循于第九届全国大学生智能汽车竞赛技术规范,在D型车模机械结构的基础上,选择MK60处理器[1]为控制核心,完成周边包括电源模块、驱动模块、速度模块和直立模块设计,并配合软件编程实现智能车的直立和循迹。
1 智能车整体结构
智能车由D型车模改装,机械结构如图1所示。倾角传感器包括陀螺仪和加速度传感器,陀螺仪水平安装,防止转弯过程中会出现加减速的现象。电池按放于底部,降低重心,提高智能车的过弯和高速通过路障区的性能;摄像头采用高强度、低质量的碳素纤维杆与智能车相连,安放于模型车直立的最高点,保证有一定的前瞻,有利于对赛道的及时反应和减少赛车前方盲区;为了保护智能车和传感器,增添了防撞保护装置。
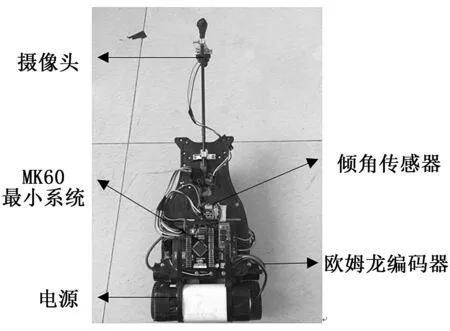
图1 智能车机械实物图
2 智能车控制原理
从智能车控制角度来看,控制对象为智能车车体,控制输入量是左右两个电机的转动速度。车模运动控制可由以下3个基本控制任务[2]组成。
1)直立控制:根据车模角度和角速度,控制电机的正反转保持智能车平衡。控制策略为PD控制。
2)速度控制:在智能车保持平衡的基础上,根据车模采集到的电机转速和速度设定值,计算电机的控制量改变倾角,最终实现智能车按要求速度行驶。采用增量式PID控制策略。
3)方向控制:根据车模采集到图像的中心值计算出两电机转速差以实现转向。控制策略为PD控制。
2.1直立控制
两轮直立智能车模型与倒立摆相似;设智能车高度为L,质量为m,将倒立摆至于可水平移动的小车上,如图2所示。
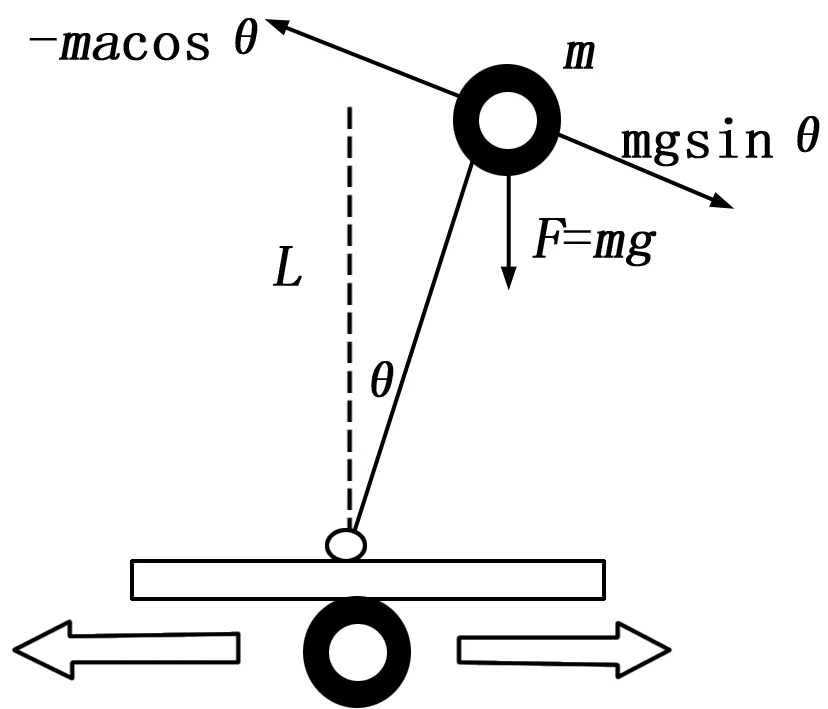
图2 倒立摆受力分析
假设外力干扰引起的角加速度为x(t),方向垂直于车体,沿该方向进行受力分析,可得到智能车运动微,分方程表达式为:
(1)
当倾角θ很小的时候,可以进行线性化处理:cos(θ)≈1、sin(θ)≈θ ,运动微分方程可简化为:
(2)
对其进行拉式变换,可得到系统输入输出传递函数:
(3)
根据牛顿第二定律,为实现倒立摆模型在垂直位置的稳定,应施加额外的受力,使得恢复力与位移方向相反才行,来源为车轮与地面的摩擦力。大小是根据角度θ及角速度θ′的反馈得出,因此需要在控制系统中引入角度θ及角速度θ′构成比例(P)微分(D)反馈环节,如图3所示。
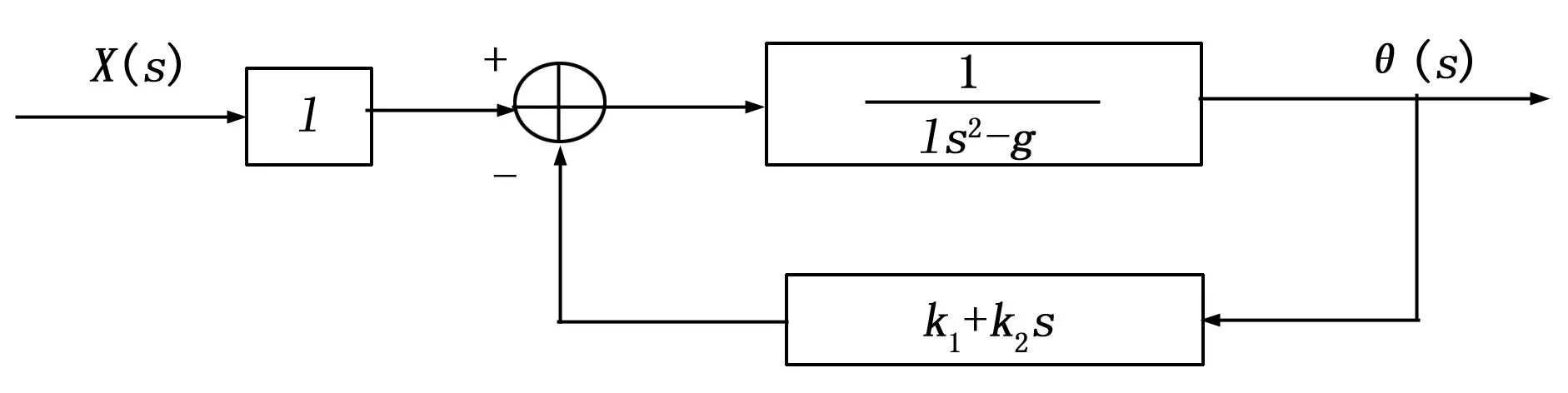
图3 比例微分环节后的控制系统结构图
加入比例微分反馈后的系统传递函数为:
(4)
测量车体的角度和角速度,经过筛选,选择陀螺仪ENC-03和加速度传感器MMA7260:采用互补滤波的方法,利用加速度传感器所得到的角度对陀螺仪测量到的角度进行校正,如图4所示。
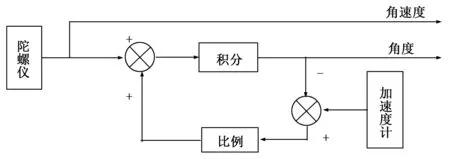
图4 互补滤波
陀螺仪利用了旋转坐标系中的物体会受到科式力影响的原理,测量出智能车的角速度,加速度传感器利用重力加速度产生的分量,得出智能车的倾斜角度;但加速度计易受外界干扰,采用互补滤波后角度输出更加平滑,消除外界干扰,使得输出的角度信号跟踪上智能车的实际角度,利于智能车运行过程中的稳定,波形如图5所示。
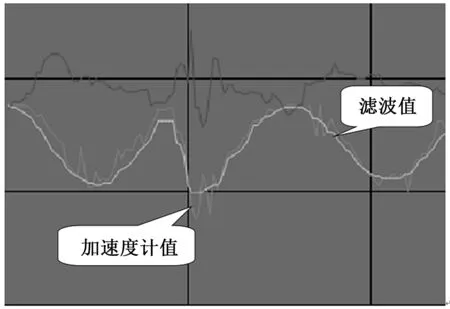
图5 互补滤波效果图
直立控制过程中,PD参数的整定,采用实验法,先比例后微分的原则,在经过反复的实验后,最终比例参数设定为145,微分参数设定为4,由于对角度和角速度进行了归一化,归一化系数是0.22,所以实际上比例参数k1=31.9,微分参数k2=0.88,但考虑到k1>g,k2>0只是在理想状态下求得的,实际情况下还要把机械结构等因素考虑内,比例参数k1和微分参数k2会相对大点,所以实际情况符合理论分析得到的结论。
2.2速度控制
速度控制的核心是形成速度闭环,选择欧姆龙编码器作为反馈单元,每周输出500个脉冲,将编码器的脉冲输出端接入单片机的I/O口,再由内部的程序处理信号,便能比较准确地测量出智能车的运行速度,再通过单片机进行反馈,就能形成一个速度控制闭环,通过PID控制,实现智能车按照给定速度行驶。如图6所示。
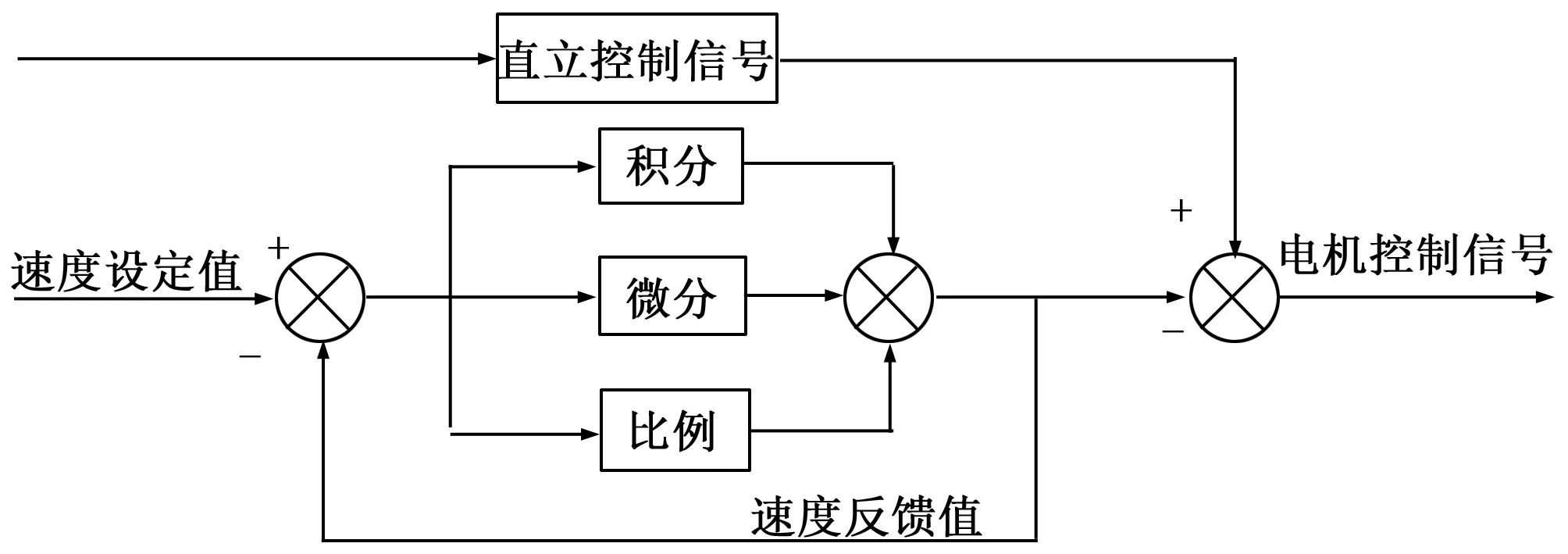
图6 速度控制算法框图
直立智能车的速度控制比四轮智能车的速度控制要复杂,原因在于在速度控制过程中,要时刻保持智能车的直立,在车模直立控制下,为了能够有一个往前的倾斜角度,车轮需要往后运动,这样会引起车轮速度下降。由于普通四轮智能车采用负反馈,使得车模往前倾角需要更大。如此循环,车模很快就会倾倒。原本利用负反馈进行速度控制反而成了“正”反馈。
为了使智能车在速度控制过程中保持直立,将速度控制量的极性设为负,和通常速度反馈控制的极性“恰好相反”,此时智能车为了保持直立,将驱动车体向前运动,实现加速目的,考虑到速度控制过程中要保持直立,如果在行驶过程中进行加减速,不利于直立车稳定,所以在运行过程中直立车速度设为恒定值,全程匀速运驶。
2.3方向控制
方向控制依靠摄像头对赛道的实时采集,选用模拟摄像头OV5116, 摄像头输出为PAL制式,PAL制式信号每秒钟扫描25 幅图像,每幅图像分为奇、偶两场,奇场在前、偶场在后,所以每秒钟扫描50场图像,保证图像采集的实时性,利于智能车对赛道的及时反应。PAL制式如图7所示。
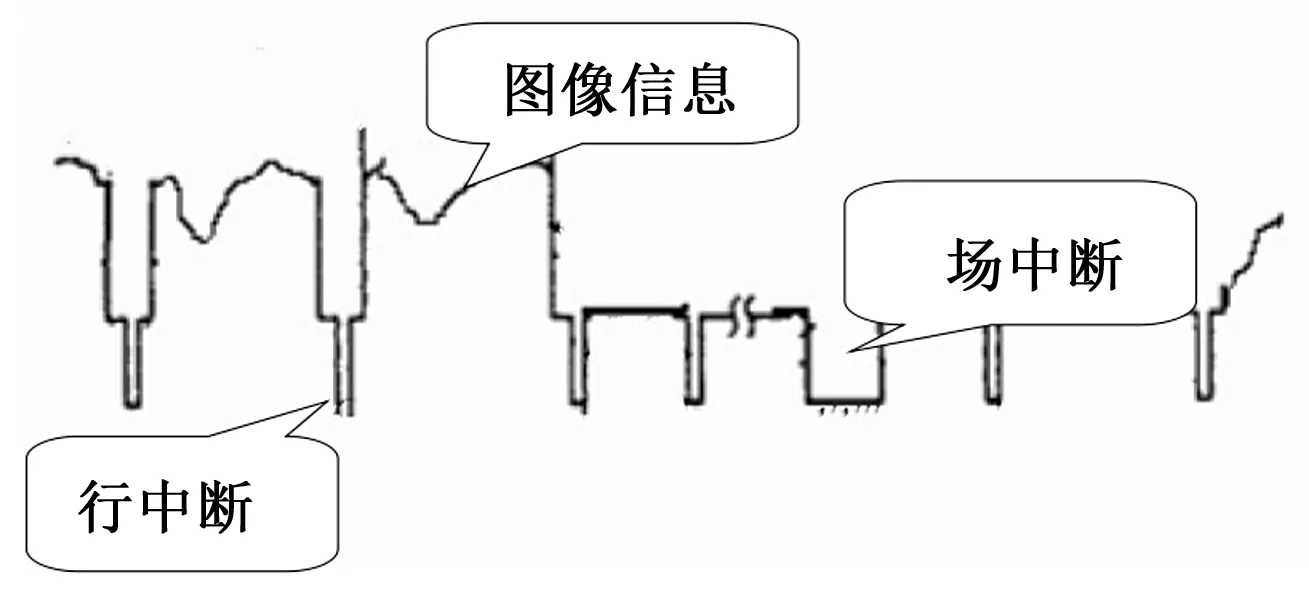
图7 PAL信号组成
PAL制式的信号线包括场中断信号,行中断信号和视频信号,并不能直接连接单片机,需要用视频处理模块对信号分离,分离出场中断信号、行中断信号和视频信号;单片机利用外部中断触发的方式采样图像数据,当新的一场到来时,单片机采集到下降沿信息进入场中断,开始采集新的一场图像;当单片机捕捉到行同步信号后就进入行中断处理程序,开始AD采集图像信息,并存储在二维数组内。
摄像头OV5116的分辨率为352×288,每一场采集的行数和列数越多越好,但是采集的多会影响单片机的处理速度,且赛道只有黑白两色,图像采集的目的在于提取黑色边缘线,所以并不需要提取所有的信息,最终方案决定每一场采集80行,150列[4]。图8是障碍赛道。

图8 障碍赛道
通过边缘检测法,提取赛道两边黑线的位置,并求出赛道中心线的位置,将中点设定值减去每行中心线位置作为偏差,为了使智能车对赛道实时作出反应,采用加权平均,近处权重大,远处权重小,如表1所示。
表1 行数权重表
得到总偏差后采用PD控制得到方向控制信号,同直立控
制信号和速度控制信号结合,实现智能车的循迹功能。
2.4直立、速度、方向融合控制
传统的方法是将智能车模的直立控制、速度控制以及方向控制都是在1 ms中断程序中完成。使用PIT定时中断模块完成1 ms中断设置,实现智能车直立,但在实际过程中智能车姿态控制1 ms中断与摄像头信息采集中断存在相互干扰的问题,影响直立控制并对摄像头采集产生负面效果,如图9(左)所示,此时赛道不完整且没有计算出赛道中心线。
为解决相互干扰的问题,将智能车模的直立控制、速度控制以及方向控制放在while循环内,并加1 ms延迟,此时程序中仅有摄像头中断,不存在干扰问题,也保证了图像信息的完整性,如图9(右)所示,图像完整并有中心线。
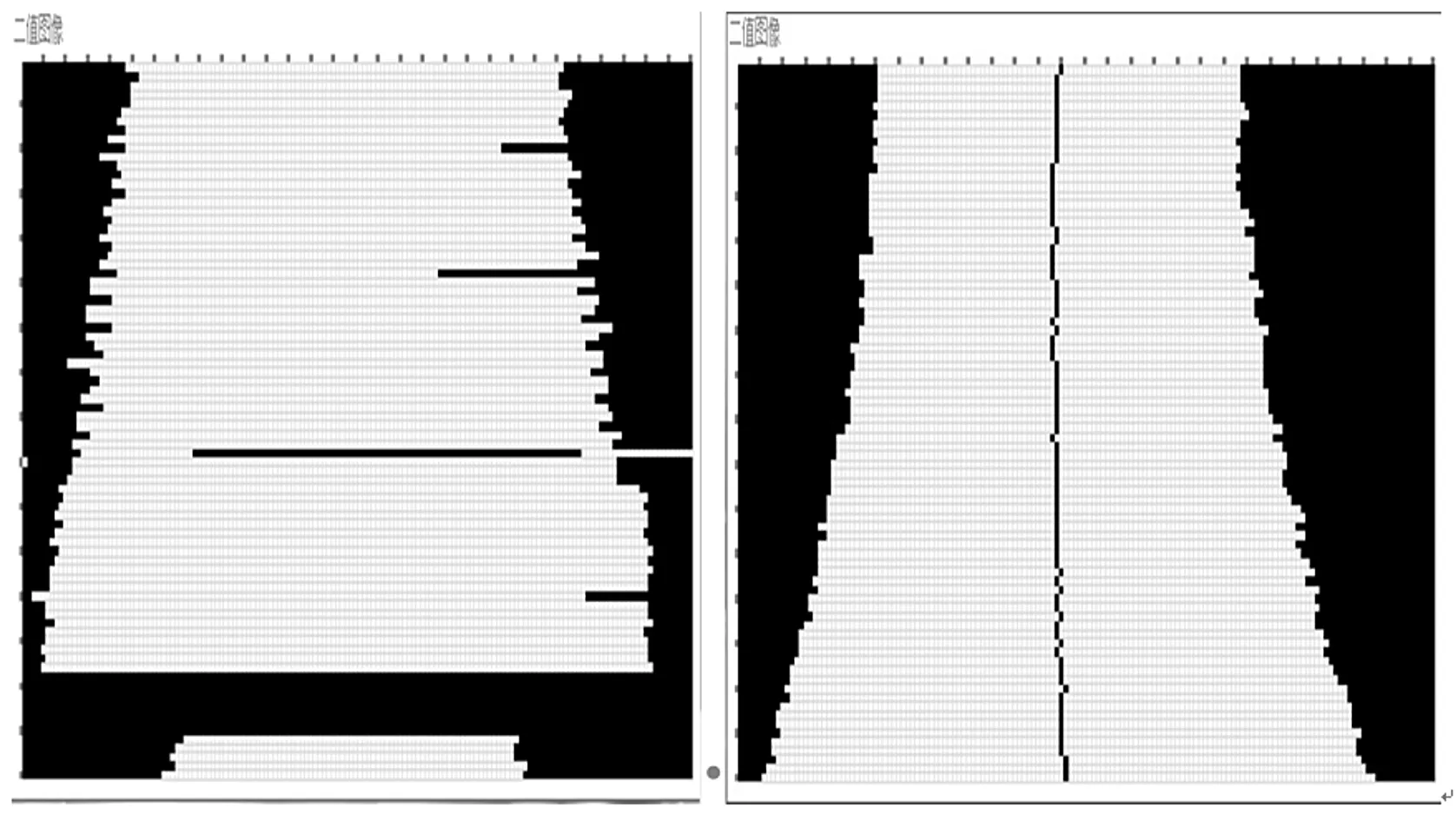
图9 赛道采集图
3 结论
本文在查阅在大量资料后,设计出直立循迹系统,利用陀螺仪、加速度传感器和摄像头采集外部信号,通过直立控制、速度控制和方向控制实现智能车的直立循迹功能,随着智能车的不断改进和优化,智能车稳定性好,速度达到2 m/s,能实现多种赛道类型的识别和循迹,达到预期的效果。
[1]王宜怀,吴瑾,蒋银珍.嵌入式系统原理与实践[M]. 北京:电子工业出版社,2012.
[2] 竞赛秘书处.直立行走参考方案2.0[Z]. 2012,64-69.
[3] 胡寿松.自动控制原理[M]. 北京:科学出版社,2007.
[4] 吴吟箫,第虹,王新生.基于黑白摄像头的智能小车路径识别系统设计[J].信息技术与信息化,2009(2):42-45.
Design of Upright Self-balancing Smart Car Based on Camera Sensor
Tai Yumin, Geng Yanfeng, Zhang Pengju, Pan Hao, Liu Jianbang
(College of Information and Control Engineering,China University of Petroleum ,Qingdao266580,China)
Design of mechanical and control system of walking upright type smart car. The system employs MK60 as the main controller, with the gyro sensor and acceleration sensor together, using complementary filter methods to measure the tilt angle and angular velocity of the smart car.,Using the PD algorithm to control the smart car wheel acceleration to offset the car movement tendency, realize the smart car upright.MK60 array camera sensor, through the edge detection algorithm to analysis of the center line and calculate deviations with the set value, then control the two left and right motor speed difference, to realize appropriate direction of the intelligent car. After testing, the smart car to stay upright at the same time, complete identification of the track, and runs smooth and fast.
smart car; upright control; PID algorithm; path recognition
2015-07-02;
2015-08-27。
邰玉民(1990-),男,山东临沂人,硕士研究生,主要从事检测技术与自动化方向的研究。
1671-4598(2016)01-0099-03
10.16526/j.cnki.11-4762/tp.2016.01.027
TP302.7
A
猜你喜欢
公民与法治(2022年4期)2022-08-03
走向世界(2022年3期)2022-04-19
玩具世界(2020年6期)2020-12-06
小哥白尼(趣味科学)(2020年6期)2020-05-22
通信技术(2018年11期)2018-11-07
经营者·汽车商业评论(2016年5期)2017-11-30
空中之家(2017年11期)2017-11-28
时代英语·高二(2017年4期)2017-08-11
解放军健康(2017年5期)2017-08-01
现代营销·经营版(2013年10期)2013-05-14