基于图像分割的尾矿坝干滩长度监测
2016-09-07 05:50黄青松张金锋王燕杰
计算机测量与控制 2016年1期
黄青松,李 青,张金锋,王燕杰
(1.中国计量学院 机电工程学院,杭州 310018; 2.浙江省安全生产科学研究院,杭州 310012)
基于图像分割的尾矿坝干滩长度监测
黄青松1,李青1,张金锋2,王燕杰1
(1.中国计量学院 机电工程学院,杭州310018; 2.浙江省安全生产科学研究院,杭州310012)
干滩长度是反映影响尾矿库安全稳定的重要参数之一;为了测量尾矿坝干滩的长度,提出一种基于图像分割的干滩长度监测系统;根据尾矿库地形特点通过获取尾矿库水域边界图像,在Emgu CV环境下,使用OTSU阈值分割法、轮廓识别、分水岭法等算法过滤图片中尾矿库周围的植物、水面的波纹和倒影,自动清晰地识别干滩和水面的分界水线,并对水线像素坐标点进行分析与处理,实时得出最准确的干滩水线像素坐标;创新性地只通过一次标志物标定就能得出水线坐标与干滩长度的函数,从而得到尾矿坝干滩长度;经过浙江建德铜矿尾矿坝实地测量,该方法长度误差小于2.6%。
尾矿坝;干滩长度;图像分割;分水岭算法
0 引言
尾矿库是部分矿山生产的必然产物,同时也是矿山重大环境污染源和危险源[1]。在线实时监测技术为矿山企业的安全提供有利保障,发展尾矿库在线实时监测技术是大势所趋。尾矿库安全监测的主要内容有浸润线、坝体位移、干滩和库水位等,其中干滩长度是反映尾矿库安全稳定的重要参数之一[2],干滩长度是指干滩顶至尾矿内水线之间的最短水平距离,如图1所示。
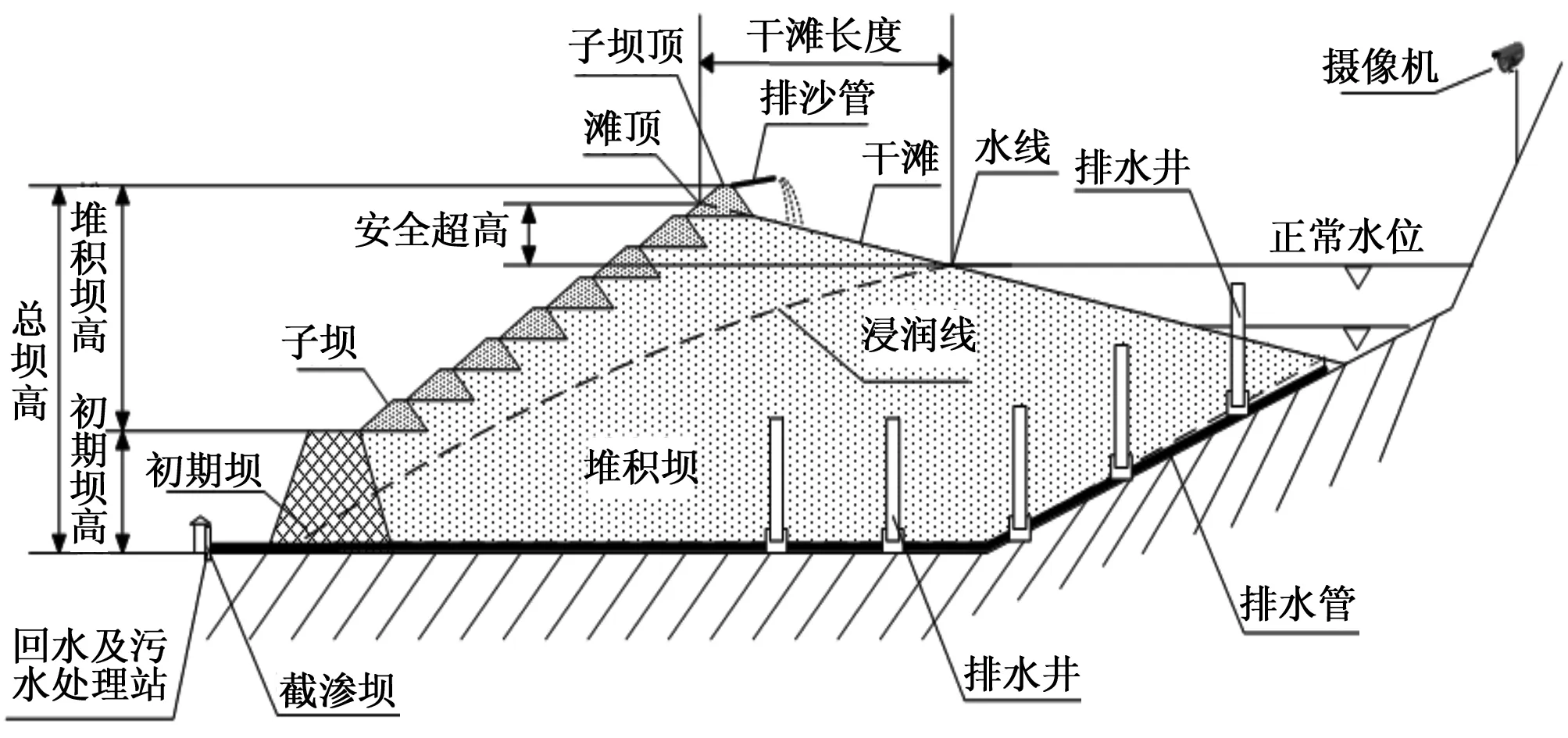
图1 尾矿坝示意图
近几年视觉测量[3]和图像处理技术[4]应用于尾矿坝干滩长度测量系统,但都是将干滩与水面区域分开,无法直接提取水线的点坐标值且标定方法复杂。通过Emgu CV[5]视觉处理算法在C#平台直接从干滩图片中提取水线上所有点的图像坐标值。从而与干滩表面标志物位置进行最小二乘法拟合函数,通过水线坐标值可得出尾矿坝干滩的长度。
1 干滩摄影系统
不同于其他干滩摄影测量系统,该系统不将摄像机放置于尾矿坝的坝顶,而是将摄像机放置于尾矿的山体上。从干滩水线的对岸拍摄干滩图像。由于尾矿沙堆积使得尾矿库容量的增加,需要往上增加子坝以提高尾矿库容量及强度。如果将摄像机放置坝顶,随着子坝的增高,摄像机安装位置势必要变化。将摄像机放置于尾矿的山体上,避免摄像机的位置变化,只需控制安装时摄像机的高度。
2 图像分割识别水线
摄像机拍摄的尾矿坝干滩照片由尾矿干滩、干滩表面的雨水及排砂废水、水面波纹、水面植物、尾矿两侧山体与植物、水面山体及植物倒影组成。由于阳光、雨雪、风力、植物生长、尾矿排砂流量流速的不确定,导致拍摄的图片存在许多影响水线识别的不确定物体及噪声。
常用的图像分割方法都将图片分割成数量不确定的若干个区块。如果将上述图像分割算法无法明确分割出干滩与水面的分割线,无法直接应用与尾矿坝干滩长度测量系统。
Beucher S等提出的分水岭算法是一种区域图像分割方法,可以精确快速的定位单像素图像边缘、检测出弱边缘对象和提取封闭轮廓[6]。因此设计出一种基于改进标记提取的分水岭图像分割算法的尾矿坝干滩长度测量系统,自动清晰的得出干滩与水面的单像素分割线。
2.1传统分水岭算法
分水岭算法是一种形态学分割算法,将图片的灰度值视作地形高度图,低灰度值像素对应山谷、高灰度值像素对应山峰山脉。水从不同地方由高致底流动,流到局部低洼处形成水盆地,最终所有的水填充在不同的盆地上,盆地与盆地之间的山脊既是分水岭[7]。
但由于该分割法极易受噪声的影响,容易产生过分割现象,所以对目标图像直接进行分水岭分割往往很难达到预期效果。
2.2改进的分水岭分割算法
改进算法的流程如下:(1)通过对图像锐化突出边缘轮廓。在HSV颜色空间中,删除尾矿干滩坝图片H值在固定值的绿色植物噪声干扰。(2)对(1)中锐化后的图像求RGB颜色梯度图像。(3)梯度图像利用OTSU算法提取标记图像, 基于形状、面积的修改标记图像。(4)对得到的标记图像进行组合成2种最终标记最小值区域, 在标记极小值的最终梯度图像上进行分水岭分割。算法流程如图2所示。
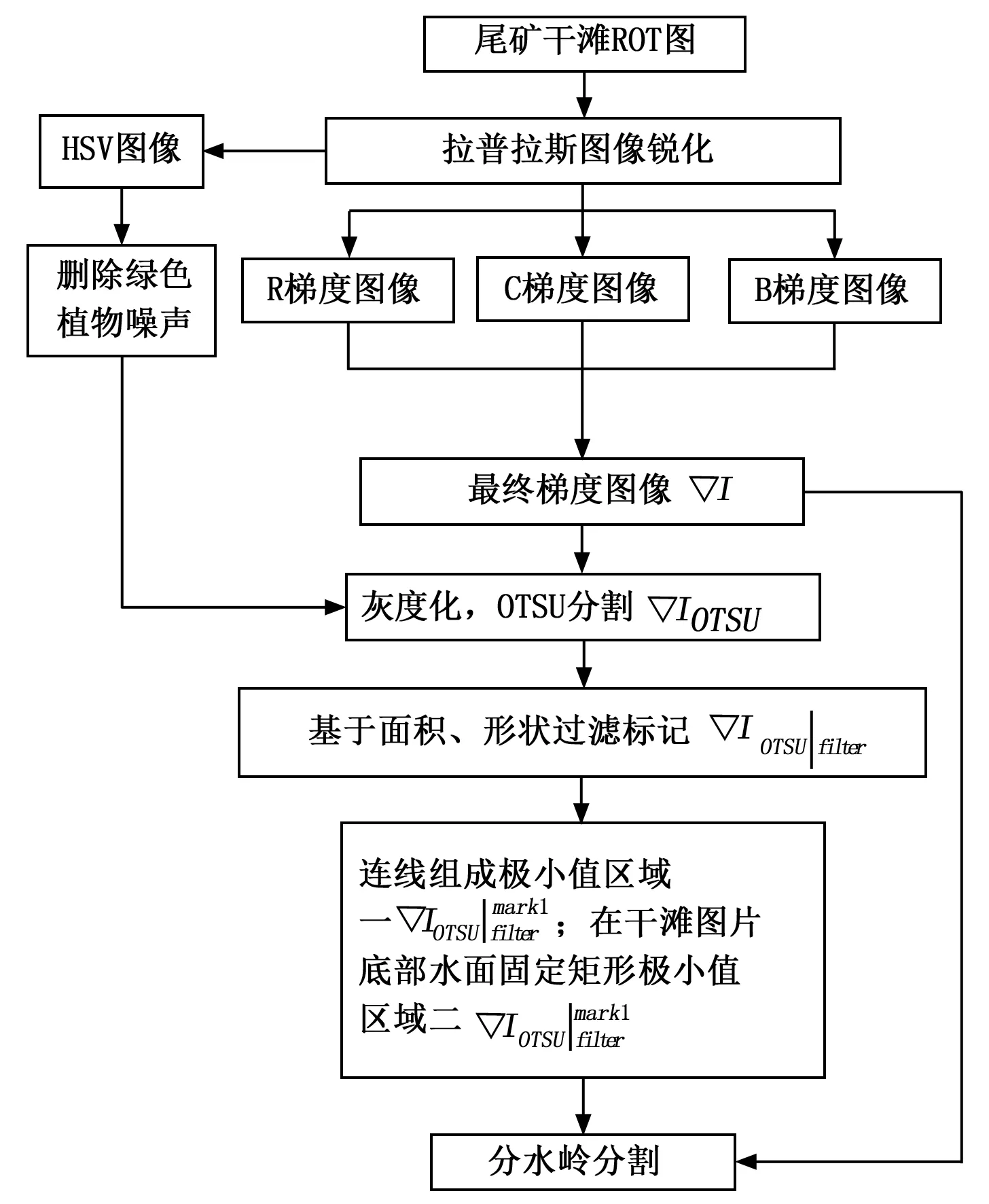
图2 Emgu CV图像处理流程图
2.2.1拉普拉斯算子图像锐化
由于尾矿坝干滩与水面图像在光照或者干滩表面湿度等因素影响下会出现轮廓模糊、线条不均、亮度不均等现象。需要通过图像锐化突出边缘信息,增强图像轮廓特征。
通过微分概念进行图像锐化,使用拉普拉斯算子做锐化高通滤波器,其运算既是偏导数运算的线性组合,同时也是各向同性(旋转不变)的线性运算[8]。其算子表达式:
(1)
对于离散函数f(x,y),其差分形式是:

(2)
将图像f(x,y)减去它的拉普拉斯变换可以增强对比度达到锐化效果:

(3)
设置ROI (Region Of Interest) 区域,取得感兴趣的中心区域,尽可能将尾矿坝两端的山体及植物删除,将图3(a)左右两侧删去20%像素,ROI锐化图如图3(b)所示。
2.2.2RGB彩色梯度计算
在彩色向量空间直接计算梯度比用灰度图像直接计算梯度具有更高的准确度。采用彩色向量空间梯度算法,直接在RGB向量空间计算梯度[9]。
设r、g、b是RGB彩色空间沿R、G、B轴的单位向量,像素沿水平方向和垂直方向的彩色梯度可用向量来表述。
(4)
数量gxx、gyy、gxy定义为这些向量的点乘:
(5)
据此可得彩色图像的梯度为:

(6)
彩色图像在(x,y)处最大变化率方向由角度θ给出:
(7)
彩色梯度图像如图3(c)所示。
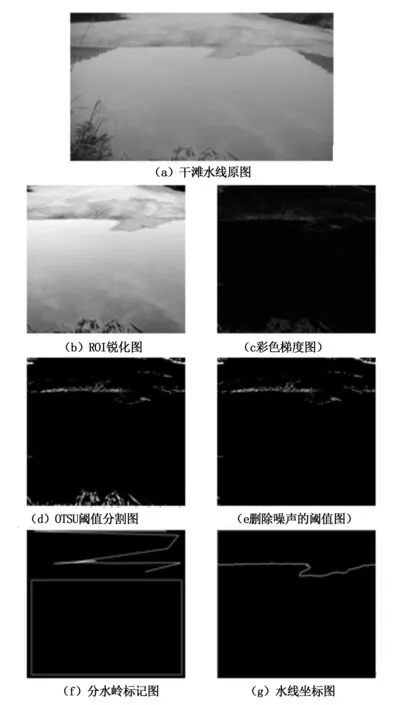
图3 图像处理结果图
2.2.3删除绿色植物噪声
尾矿坝干滩图为RGB(Red,Green,Blue)图像,容易受到光线强弱、阴影等因素影响。相比之下,HSV(Hue,Saturation,Value)模型面对这些光照的变化更稳定一些,能更好的反应颜色的本质。将此RGB图转为HSV图片,每个像素点都可用HSV表示,即f(H,S,V)。H表示颜色的相位角(Hue),范围:[0,360],互补色分别相差180度;红、蓝、绿分别相隔120度。尾矿坝干滩图片底部的绿色植物HSV图像为亮绿色。截取图片中绿色植物图片(像素:100×100),如图4。取其H分量归一化直方图,如图5,绿色植物H值为0.12×360度到0.25×360度,既43.2度到90度。记录下该H值范围的绿色植物像素坐标点。

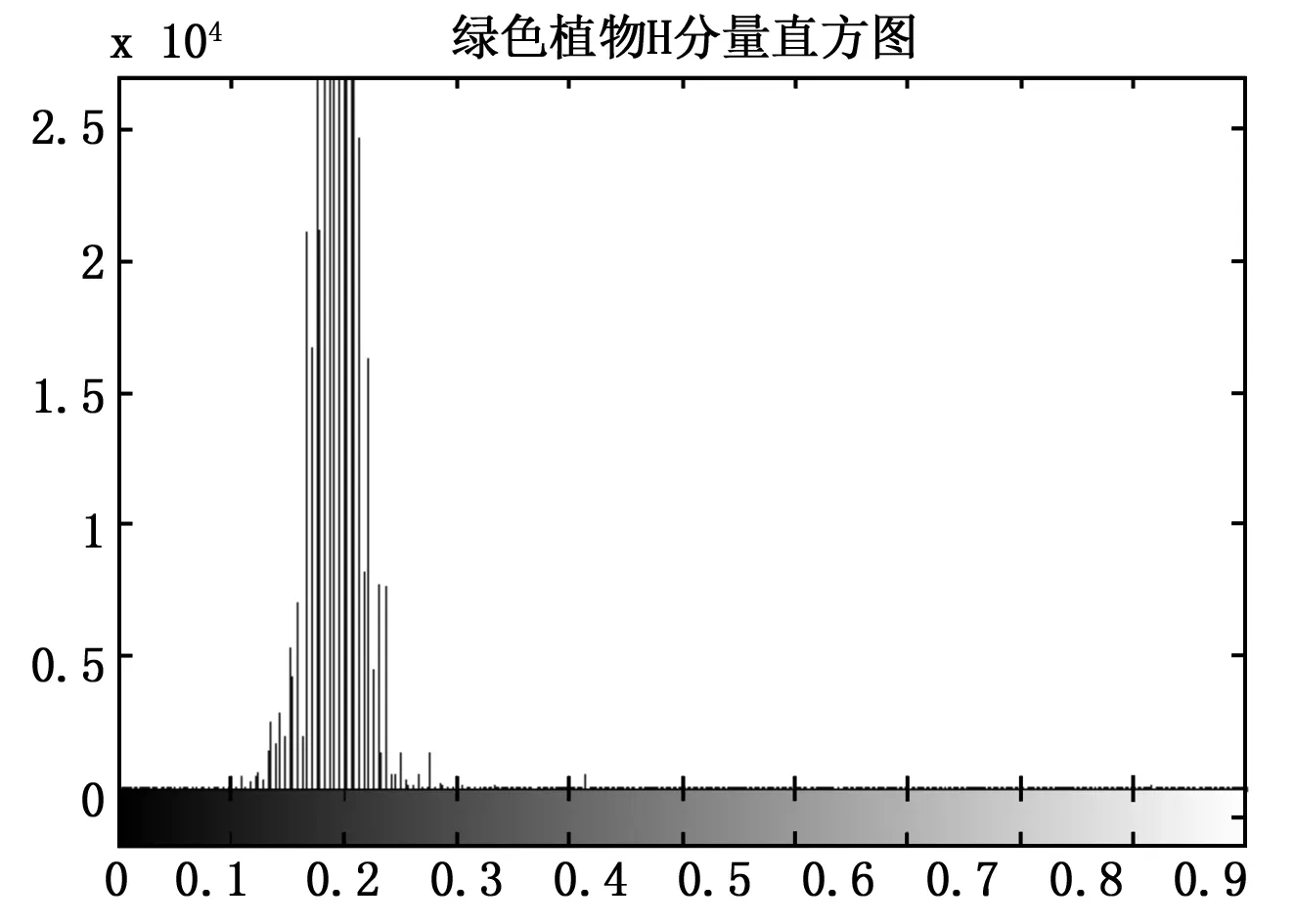
图5 绿色植物H分量直方图

图4截取绿色植物图片(100×100)
2.2.4OTSU法标记提取
对梯度图像进行二值化阈值处理,采用一种使类间方差最大化的自动求取阈值方法,即OTSU法[10]。得到最佳阈值T之后,将输入图像f(x,y)按照下面的规则进行其分类:
(8)
其中,▽IOTSU(x,y)是阈值分割后的图像,灰度值为255(二值化则为1)的是标记区域。OTSU阈值分割图如图3(d)所示。记录下绿色植物的像素坐标点,在阈值分割图中将该坐标的像素值置零变黑,如图3(e)所示。
2.2.5基于面积、形状过滤标记
尾矿坝干滩图像标记轮廓局部极小值灰度值反映了区域边缘的强度,增大阈值T可以更有效地消除虚假边缘,但是真实的弱边缘可能被当作噪声过滤掉。
如图6,T2梯度灰度值小于噪声梯度值Tn,为了剔除噪声,阈值T必须大于Tn,同时却把目标梯度2删除,所以通过阈值不能完全过滤噪声得到有效标记。S1、S2、Sn表示目标1标记面积、目标2标记面积、噪声标记面积。梯度图像中标记表面较为平坦,一般有较大的面积及较高的梯度;而噪声经过梯度计算产生的区域面积很小。
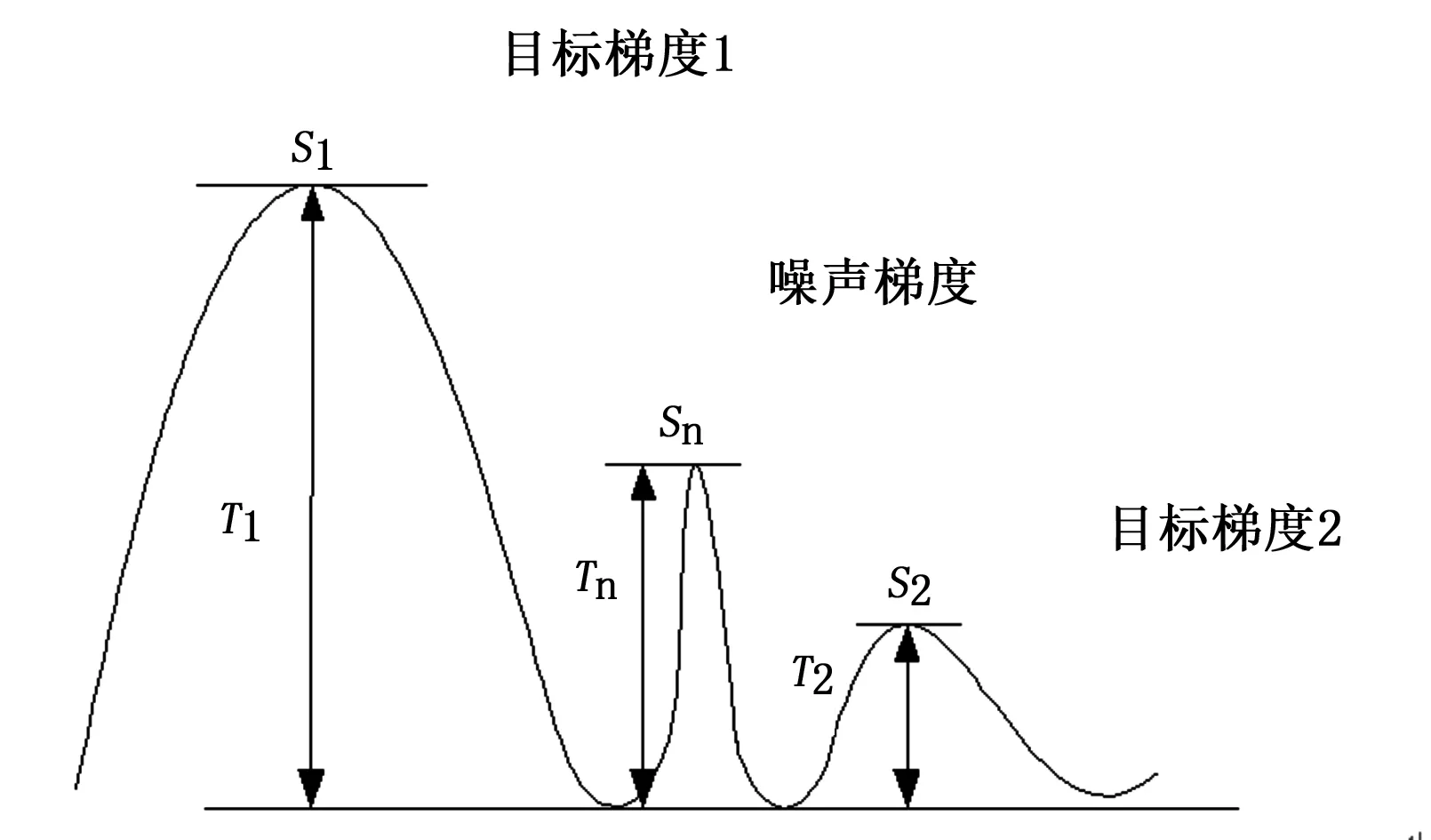
图6 目标与噪声梯度对比图
在尾矿坝干滩图片中干滩表面的轮廓由于尾砂排放的冲涮以及山体排水淹没与涨水,造成轮廓呈现长条形。删除长宽比小于系数K的目标标记,删除面积小于N的目标标记,避免无意义小区域的产生,提高标记提取的有效性和算法的抗噪性能,得到新的二值化标记 ablaIOTSU|filter。
2.2.6重绘标记
将得到的有效轮廓的中心坐标用直线串联起来作为标记一 ablaIOTSU|filtermark1;查询夏天雨季时单日最大干滩变化长度的知,干滩历史数据干滩水线的变化范围在若干天内是固定的,在水线下方,画出一个长方体作为标记二 ablaIOTSU|filtermark2,该标记二的4个角点的纵坐标需在水线的变化范围之外。 ablaIOTSU|filtermark1和 ablaIOTSU|filtermark2为标记图像的种子像素灰度值大于0,二值化表示为1,既是白色线条部分;非种子部分为0,既是画面黑色部分;如图6(f)所示。
2.2.7分水岭算法分割
获取极小值标记后即可利用形态学极小值标定技术修改梯度图,将应极小值标记 ablaIOTSU|filtermark1和 ablaIOTSU|filtermark2种子部分的点置0,其余点保持原梯度图▽I不变,得到新的梯度图▽Io,既:
(9)
式中,IMMIN()为Soille[11]所提出的极小值强制运算。将得到▽Io进行分水岭分割算法,得到的图像用IWS表示,既:
(10)
式(10)中Waterd()表示分水岭分割算法。
2.3图像分割实验结果
通过对Emgu CV识别图像6(e)最大标记面积Smax,面积系数Ns、最大长宽比系数K,面积小于N=Smax×Ns、最大长宽比小于K的轮廓。参数数值如表1所示。
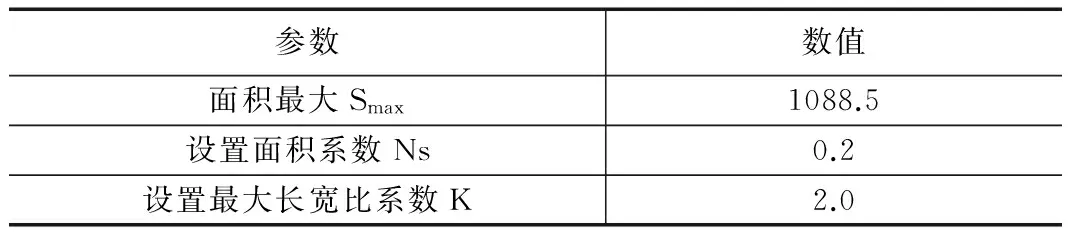
表1 删除轮廓噪声参数

3 测量结果分析
3.1安放标志物
只需一次安放标志物就可标定图像坐标与干滩长度的关系。将泡沫标志物用细绳串起来,在坝顶和山体处固定细绳,垂直尾矿坝顶放置标志物,在水面上安放用泡沫标志物。此方法只需操作人员站在干滩干燥处及山体标定一次即可取走泡沫标志物,无需在干滩潮湿处及水面长期安放标志物,避免了标志物被掩埋及操作人员定期检查操作。安放标志物位置,x1到x8,如图7所示。本次试验使用8个间隔为15米的泡沫标志物进行干滩长度标定,在不同角度拍摄若干张图片。

图7 标志物提取坐标点
3.2图像坐标与干滩长度几何模型
在浙江建德铜矿尾矿库进行测量实验,使用索尼DSC-T900相机进行拍摄。拍摄图6(a)相机参数:分辨率为1 920×1 080,光圈值f/3.5,曝光时间1/60秒,焦距6 mm,最大光圈3.625。使用MATLAB的cftool(Curve Fitting Tool)拟合工具箱将Windows画图工具手动提取标志物图像像素纵坐标与实际长度通过拟合指数函数绘制出图8。使用95%置信区间产生拟合参数,得到g(x,y):y=320.1*e((-9.063e-005)*x)-179.5*e(-0.001 924*x),残差平方和(SSE)为3.501,相关系数平方(R-square)为0.999 7,校正相关系数平方(Adjust R-square)为0.999 6,标准差(RMSE)为0.836 8。将MATLAB得到的g(x,y)函数使用C#编程与Emgu CV水线图像识别结合,可实现实时监测干滩长度。
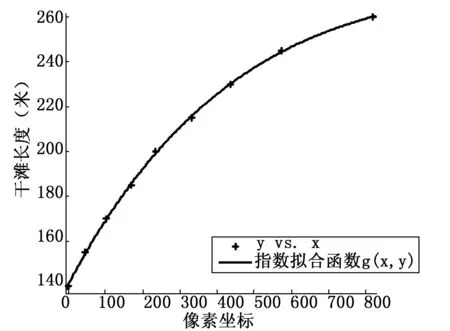
图8最小二乘法拟合曲线函数g(x,y)
3.3实验测试结果
将图3(g)得到的水线像素纵坐标最小值为237带入图8中的拟合函数g(x,y)得到干滩长度为199.5米。将干滩长度L与用全站仪(型号:苏州一光OTS812BL)测出的干滩长度204.9米进行比较,误差为5.4米,误差小于2.6%
本实验8张干滩水线图片通过图像处理得到的干滩水线最小纵坐标xmin带入g(x,y)得到干滩长度L=g(xmin,y)与真实值比较误差皆小于6米,误差小于2.9%,满足干滩测量要求。
误差主要来源于标志物安放是长度测量时人工使用卷尺测量造成误差;人工识别标志物坐标位置是由于标志物距离相机拍摄位置远,在画面中面积小,手动识别坐标势必会产生长度误差。
4 结论
1)为了安全稳定的监测尾矿坝干滩长度,使用Emgu CV视觉处理库在C#平台利用改进分水岭算法创新地解决了所有干滩水线点坐标值的取得问题。
2)在干滩和水面上垂直尾矿坝顶放置若干个泡沫标志物,固定相机,只需提取一次其坐标值与实际的坐标处干滩长度。解决了过往干滩长度监测过程中复杂而危险得标定方法,简化标定工作。通过最小二乘法拟合函数,将水线坐标值带入拟合函数可得到干滩长度,经过实验误差小于2.9%满足测量要求。
[1]李青石,李庶林,陈际经. 试论尾矿库安全监测的现状及前景[J]. 中国地质灾害与防治学报,2011,22(1):99-106.
[2] 陈善刚,苏军,袁子清,等. 尾矿库安全在线监测技术探讨[J]. 有色金属(选矿部分),2011(3):64-67.
[3] 胡军,刘泽北,胡珊. 基于视觉测量的尾矿库干滩长度监测[J]. 工业安全与环保,2014(11):1-4.
[4] 张玉磊,牛昱光,李晓新. 基于数字图像处理技术的尾矿坝干滩长度监测[J]. 矿业研究与开发,2013(6):106-108.
[5] Bradski G,Kaehler A,Pisarevsky V.Learning-based computer vision with Intel’s open source computer vision library[J]. Intel Technology Journal . 2005,9(2):119-130.
[6] Beucher S,Meyer F.The morphological approach to segmentation the watershed transformation[J].Mathematical Morphology in Image Processsing. New York:Marcel Dekker,1993:433-481.[7] 魏振忠,郗曼,张广军,等. 一种山区图像边缘信息的分水岭变换提取方法[J]. 计算机测量与控制,2009,(7):1403-1406.
[8] 吴海波,刘钊.基于拉普拉斯算子的彩色图像锐化处理[J]. 电脑开发与应用,2008,(9):27-28.
[9] 余旺盛,侯志强,王朝英,等. 基于改进滤波和标记提取的分水岭算法[J]. 电子学报,2011,(4):825-830.
[10] Otsu N.A threshold selection method from gray-level histograms[J]. IEEE Transactions on Systems, Man and Cybernetics.1979.
[11] Soille P.Morphological Image Analysis: Principles and Applications, 2nd ed[M].Springer-Verlag ,N Y,2003.
Dry Beach of Tailings Dam Length Monitoring Based on Image Segmentation
Huang Qingsong1,Li Qing1,Zhang Jinfeng2,Wang Yanjie1
(1.College of Mechanical and Electrical Engineering,China Jiliang University,Hangzhou310018 ,China;2.Zhejiang Institute of Safety Science and Technology,Hangzhou310012,China)
The length of dry beach is an important monitoring content that affects the safety of tailing pond. In order to measure the length of the tailings dam,proposed a dry beach length monitoring system based on image segmentation.According to the terrain features of the tailings dam, the water boundary image of the tailings dam is obtained by the acquisition of the water.In the Emgu CV environment, the OTSU algorithm threshold segmentation, contour recognition, and watershed algorithm can be used to retrieve the boundary between dry beaches and water surface.Analyze and deal with the image pixel coordinates, the most accurate pixel coordinates of waterline can be real-time measured.Only through one calibration can be obtained waterline coordinates and dry beach length function innovatively, so it’s easy to measure the dry beach of tailings dam length.After field survey of tailings dam in Zhejiang Jiande copper mine, the error of this method is less than 2.6%.
tailings dam; dry beach length; image segmentation; watershed algorithm
2015-07-24;
2015-08-27。
国家质量监督检验检疫总局科技计划项目(2013QK027);浙江省“仪器科学与技术”重中之重学科开放基金资助(JL150516)。
黄青松(1990- ),男,福建宁德人,硕士,主要从事图像处理、尾矿安全方向的研究。
李青(1955-),男,浙江杭州人,教授,主要从事测控技术,传感器方向的研究。
1671-4598(2016)01-0067-04
10.16526/j.cnki.11-4762/tp.2016.01.018
TD
A
猜你喜欢
昆钢科技(2022年2期)2022-07-08
建材发展导向(2022年4期)2022-03-16
有色金属(矿山部分)(2021年4期)2021-08-30
河北地质(2021年2期)2021-08-21
矿产综合利用(2020年1期)2020-07-24
劳动保护(2018年8期)2018-09-12
江西建材(2018年4期)2018-04-10
现代传输(2016年3期)2017-01-15
现代传输(2016年2期)2016-12-01
新农业(2016年5期)2016-05-23