浅析工业基于PLC的伺服电机定位运动
2016-09-06 08:53:42阮安正华南理工大学广州学院广东广州510800
中国设备工程 2016年9期
阮安正(华南理工大学广州学院,广东 广州 510800)
浅析工业基于PLC的伺服电机定位运动
阮安正
(华南理工大学广州学院,广东 广州 510800)
目前在工业自动化中,基于PLC控制的伺服电机的使用非常广泛,一般在精度比较低的要求中用PLC加步进电机来解决问题,在精度要求比较高的地方就用PLC加伺服电机来解决问题。本文针对基于PLC控制的伺服电机定位运动展开深入分析,总结一些相关实际现场可能出现的问题。希望本文能给相关读者一些有价值的参考。
伺服电机;PLC;定点运动
PLC控制器目前在轻功行业应用很广,近些年来在政府的号召下,许多工厂在产线升级,机器替代人工的过程中,PLC被更加广泛的用于电机的控制、气缸的控制。目前比较流行的伺服电机以松下、三菱、西门子这几类为主。本文的研究将以松下PLC为例做介绍;目前的伺服电机主要使用的是安川、松下、三菱的伺服电机,在这里本文以松下电机为例。
1 PLC控制的伺服电机定位运动的实现
1.1 定位运动分类
通常我们所说的定点运动分为两类,一种是单轴(单一方向)的定点运动,一种是多轴的定点运动。工业上为了实现单轴运动已经发展出来了很多单轴模组;多轴定位运动上已经发展出了多轴机器人,例如国产的李群四轴机器人,六轴的如ABB、三菱、库卡、柯马等一些知名品牌。基于本人的有限知识,在这里只对单轴定点运动进行研究。
1.2 精确定位系统的总体设计
整个定位运动系统将由控制部分(PLC)、驱动部分(交流伺服电动机)、导向部分(滚珠丝杆等精密部)、工作台、AD/DA转换模块、触摸屏人机界面以及其他辅助部件组成。具体情况如图1所示。

图1 系统整体方案
在这样的系统中PLC与伺服驱动器之间将会进行信息交互,伺服电机由伺服驱动器驱动。人的意志可以通过触摸屏这个人机交互界面来对PLC发出指令,这些指令将会最终被电机执行。
1.3 技术指标
丝杆进给速度可调范要大(正常速度70~120 mm/s,快进速度3 000 mm/min),另外还要保证很好的精度。本文制定的指令单位为l um,也就意味着一个脉冲信号控制丝杆运动1 um。在实际工程中,信号需要经过差分信号处理之后才到达PLC,本文因为选择的是松下伺服电机与PLC,脉冲丢失不超过10个。
1.4 单轴模组的选型
电机最终是驱动单轴模组而实现定点运动的,因此单轴模组的选型也是很重要的。
①单轴模组原理。由于本文的精度要求比较高,我们在这里不可能使用皮带—滑块型单轴模组,我们要使用的是丝杆—滑块型单轴模组。
所谓丝杆—滑块型号的单轴模组就是用丝杆加上滑块来实现精密的直线运动。通常情况下单轴模组里面会有一根丝杆,两根直线滑轨,还有丝杆固定座、丝杆螺母、联轴器等组成。
②单轴模组选择。在精度要求比较高的情况下,中国企业选择丝杆一般会选择上银、misumi的丝杆和直线滑轨来设计自己的单轴模组,如果是买市场上现成的,会有很多国产品牌可供选择,但是里面的核心部件基本上还是依赖进口。
1.5 控制辅助原件
即使是伺服电机,为了防止误差的出现,我们还是需要在单轴模组上面设置传感器来实现定点运动更加精准的实现。在单轴模组上面一般需要安装三个光电传感器。依次排开,两边分别是“近点”、“远点”,中间一个是“原点”。单轴模组在每次运动中参考原点来运动,“近点”与“远点”之间的距离就是人为设置行程。
2 PLC伺服控制系统的软件设计
2.1 PLC伺服控制系统软件的总体设计
控制系统主要是通过脉冲来实现对丝杆运动的控制,丝杆是运动台的动力,根据现代设计理念,这一控制过程应该满足人的方便操作要求,因此我们在这里加入了触摸屏人机界面,PLC通过人界面的指令以及光电感应器反馈的信号来判断位置,并根据回馈的信号进行调整。
2.2 限位开关电路的程序设计
限位开关电路的程序设计流程图如图2所示。放置在原点处的限位开关输出端与PLC的X 2连换右极限处的限位开关输出端与PLC的X 5连接,左极限处的限位开关输出端与PLC的X 4连接。
3 总结
伺服电机的选型一定要根据负载选择电机,旋转编码器编程方式通常一般是增量编程,通常选择带油封、带刹车的伺服电机。实际中,传感器要用三个,在特殊情况下,例如行程特别短的情况下可以只用两个,第三个点的位置可以通过PLC进行位置偏移来实现定位。
本文只列举了单轴定点运动情况,在很多时候,我们要实现双轴(X Y)方向的定点、三轴(X Y Z)方向的定点运动,在这种情况下,我们的人机界面里面就要植入更多其他方向的运动控制界面来实现单动、联动。
[1] 肖子廉.PLC控制伺服电机实现定位控制[J]电子世界,2014,(5).
[2] 黄灿灿.基于PLC的脉冲磁体绕线机伺服电机控制系统的设
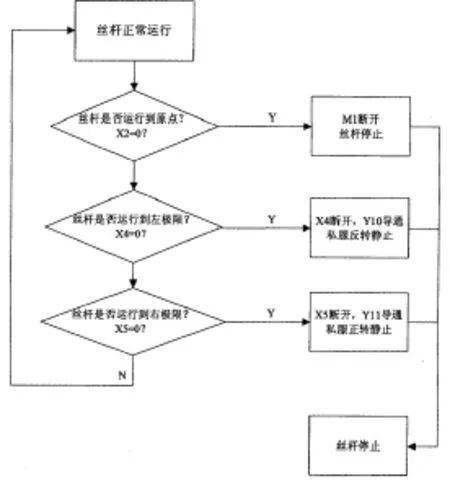
图2 限位开关PLC程序设计流程图
[3] 刘佳佳.PLC伺服控制系统实现精确定位的设计与研发[D]南京师范大学,2013,(3).
[4] 林杰文,吴亦锋.基于PLC的伺服电机运动控制系统设计[J]机电技术,2015,(10).
TM 383.4
B
1671-0711(2016)08(上)-0062-02
猜你喜欢
中国设备工程(2024年9期)2024-05-13 06:05:08
橡塑技术与装备(2022年10期)2022-10-03 07:39:14
流体机械(2022年5期)2022-06-28 02:30:00
橡塑技术与装备(2021年2期)2021-02-01 03:36:18
电子制作(2019年12期)2019-07-16 08:45:20
摄影之友(影像视觉)(2018年10期)2018-11-06 06:25:50
电子制作(2018年8期)2018-06-26 06:43:10
电子测试(2017年11期)2017-12-15 08:57:38
汽车维修与保养(2015年1期)2015-04-17 03:25:27
中国摄影(2014年9期)2014-09-24 22:30:53