
异步电动机动态节能综合实验平台研制
2016-08-30 01:36王玉彬马文忠
实验技术与管理 2016年6期
王玉彬, 马文忠
(中国石油大学(华东) 信息与控制工程学院, 山东 青岛 266580)
异步电动机动态节能综合实验平台研制
王玉彬, 马文忠
(中国石油大学(华东) 信息与控制工程学院, 山东 青岛266580)
为满足目前学生实验向综合性和研究性发展的需要,开发了异步电动机动态节能综合实验平台。针对异步电动机经常轻载运行这一工况,依据调压节能原理,综合运用了电动机及电气控制相关专业知识,通过对功率主电路、驱动电路、信号检测电路以及控制电路等设计和调试,实现了异步电动机的软启动及动态节能实验。该综合实验平台的应用,既丰富了电机学等专业课程的教学内容,又能提高学生的综合实践能力,取得了良好的教学效果。
异步电动机; 综合实验; 动态节能
异步电动机结构简单,控制技术成熟,运行可靠,价格低廉,因此,被广泛用作工农业生产中的动力设备[1-2]。目前,异步电动机的实验课程主要以电机参数测定以及交流调速等基础性实验为主,学生对异步电动机工程应用的理解停留在认知层面,缺少由认知提升到应用层面的综合性实验装置。因此,为满足实验教学需要,实现由基础性实验课程向探究性实验课程的过渡,本文面向工程实践发展方向,研制了一套异步电动机动态节能综合实验平台。该平台融合电机学、电力电子技术、自动控制及计算机控制等多学科领域专业知识,能够使学生从本质上理解异步电动机的运行原理,能够提高学生综合运用专业知识的实践动手能力,达到学以致用的训练目的[3-5]。
1 实验平台总体设计
异步电动机动态节能综合实验平台,意味着自异步电动机启动开始,至电动机稳定运行的整个过程中,该装置能够根据负载的动态变化全程实现节能运行。为此,所设计的实验平台应具备软启动和动态节能运行两大功能。图1所示为实验平台的系统框图,控制器采用AT89S51单片机,其外围电路主要由电压过零点检测电路、电流过零点检测电路以及晶闸管的驱动与保护电路等构成。
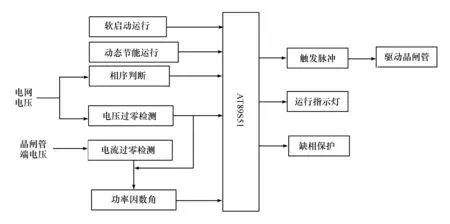
图1 实验平台系统框图
1.1主电路设计
主电路采用图2所示的三相交流调压电路,ABC三相电网电压经调压后接至异步电动机的对应相,驱动电动机运行。功率器件采用西门康晶闸管可控模块SKKT42/12E,其额定电流为42 A,耐压可达1 200 V。缓冲电路则采用RC串联缓冲电路,其作用是吸收晶闸管关断时晶闸管两端的过电压。其中,R=68 Ω(功率为5 W),C=22F(无感电容)。
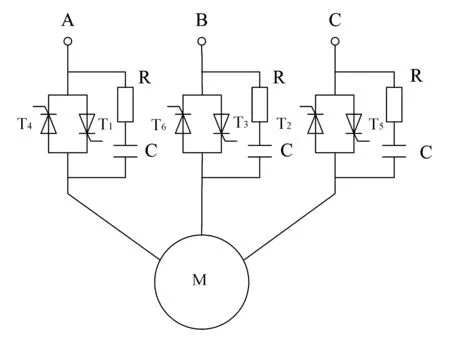
图2 主电路
1.2驱动及信号检测电路
1.2.1驱动电路
晶闸管驱动电路见图3,驱动芯片采用摩托罗拉公司的晶闸管专用驱动集成电路MOC3052。由于MOC3052承受的最大电压值为线电压峰值,但是其耐压值仅为240 V,因此设计时采用两片MOC3052串联可以有效地解决这一问题。图3中的2 MΩ电阻为均压电阻,使得每个MOC3052承受的电压均为线电压的一半。MOC3052芯片驱动的工作原理:在电压正半波,正向电压经A+、D2、4个串联的2 MΩ电阻施加在晶闸管T1的门极及阴极之间,由于D2的压降给T4的门极与阴极间施加0.7 V左右的反向电压,所以此时T4能够可靠保持关断状态。若此时控制器自P1.0及P2.6管脚发出MOC3052导通信号,则两片串联的MOC3052处于导通状态,提供门极电流,且此时T1的门极与阴极之间为正向偏置,满足晶闸管的导通条件,T1导通。同理,在A相的负半波期间触发时应该T2导通,T4导通的原理和T1类似。

图3 晶闸管驱动电路
1.2.2信号检测电路
信号检测主要包括相序检测、电压过零点及电流过零点检测,根据电压过零点以及电流过零点的相位差,从而确定电机的功率因数角。由于相序检测及电压过零点检测较为常规,此处仅给出图4所示利用晶闸管压降检测电流过零点的检测电路[6]。为捕捉电流过零点,采用高速光电耦合器6N139。它的作用是:若T1和T4关断,则光藕导通,6脚低电平输出;若T1或T4导通,则光藕关断,6脚高电平输出。控制器实时检测光电耦合器6N139的6脚电平,则可以准确地检测电流的过零点。

图4 电流过零检测电路
图5为本异步电动机动态节能综合实验平台实物图,其额定功率为7.5 kW,可满足实验需要。同时,为方便比较异步电动机常规运行与节能运行的耗电量,实验平台配置了三相电度表,根据常规运行和节能运行的用电量,可以直观地反映其节能运行效果。

图5 异步电动机动态节能综合实验平台实物图
1.3系统软件设计
系统运行时,主要包含软启动和调压节能两种运行工况,因此,系统软件设计中首先采用功率因数角闭环控制实现软启动。启动结束后,根据负载率的大小判断是否节能运行,若负载率低于预先设定值,则按最小功率因数角控制规律实现节能运行,若负载率大于预先设定值,则设定晶闸管触发角为0°,常规运行。图6为该综合实验平台的程序设计流程图。
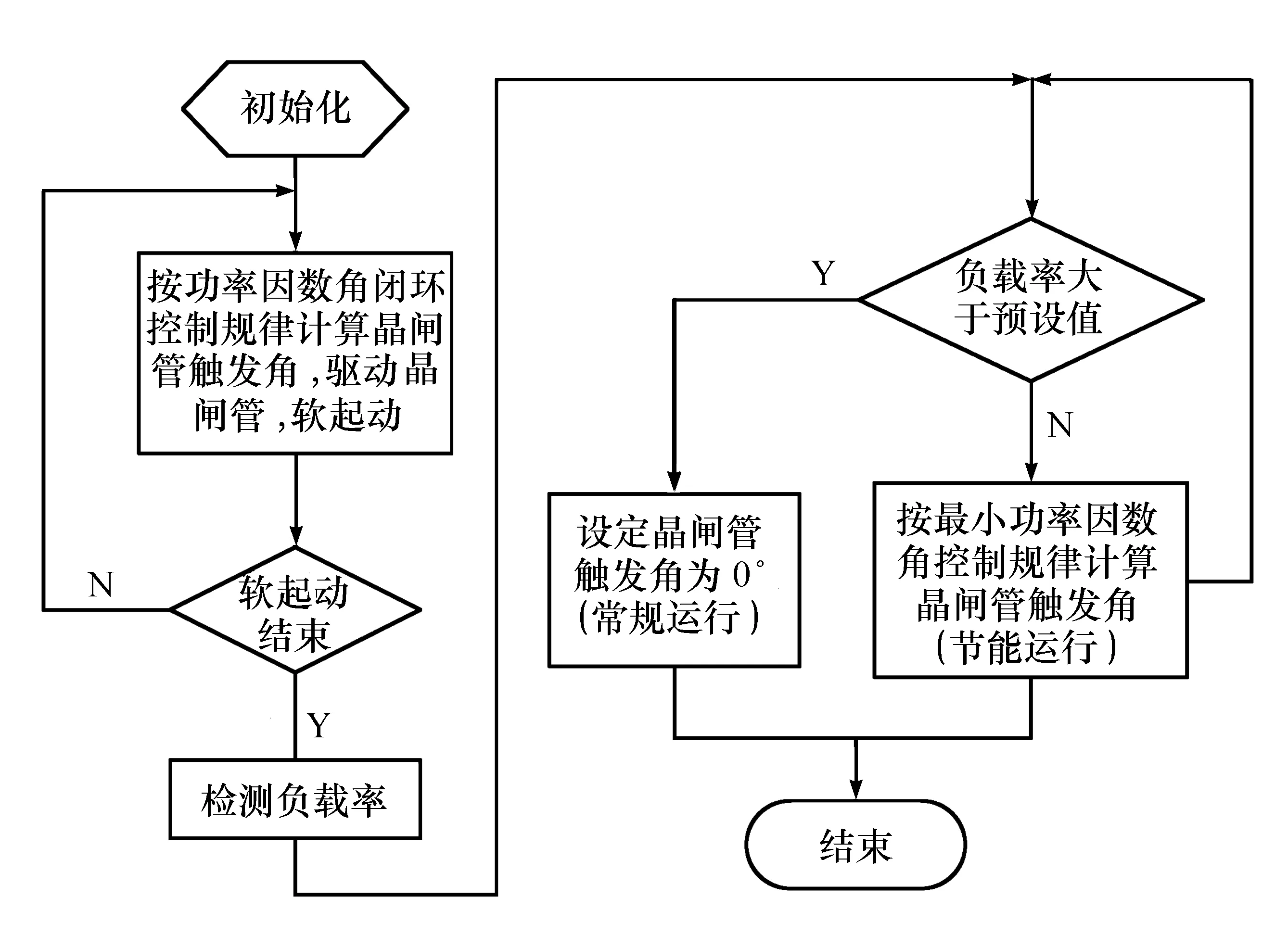
图6 程序流程图
2 实验项目设计
本异步电动机动态节能综合实验平台可实现异步电动机的软启动和动态节能两种实验模式,均为多课时段实验,其中软启动实验为基础,在完成软启动实验的基础上,进行动态节能实验。
2.1软启动实验
基于异步电动机降低定子端电压时的人为机械特性,按照设定的规律控制图2所示的主电路中晶闸管的触发角,使得施加在电动机的三相电压逐步增加,并且将启动电流值限制在某一设定值之下,即可实现异步电动机的软启动。由于电动机在轻载或空载软启动过程中经常出现电流、电磁转矩以及转速的振荡现象,致使电动机的机体发生振动,严重时会对电动机本体造成损害。为避免这一现象的产生,可将晶闸管触发角分为两部分,一部分按照预定规律设定,另一部分为随电动机功率因数角变化的调整量,这两部分的和构成触发角的实际值,为此必须实时检测电机的功率因数角,采用功率因数角闭环控制。其方法:首先检测三相电网电压的过零点时刻t1,然后根据图4所示电路检测电动机电流过零点时刻t2,其相位差即为可检测的功率因数角,再将该功率因数角反馈到的晶闸管触发角的规律设定中,即可实现功率因数角的闭环控制[7-9]。
软启动实验要求学生提前复习以下知识点:
(1) 异步电动机的调压调速机械特性及调压调速适用的负载类型;
(2) 电力电子技术中三相交流调压的基本工作原理;
(3) AT89S51单片机的硬件结构及其软件编程。
图7为直接启动与软启动时电动机定子电流波形。
在图7(a)所示的直接启动中,电机自静止到空载运行仅需0.3 s左右;而在图7(b)所示的软启动中,电动机经过完成整个启动过程需要2.5 s左右,且没有出现定子电流振荡现象,这表明所采用的功率因数角闭环控制可有效抑制电流振荡,能够实现装置的软启动功能。

图7 异步电动机直接启动与软启动定子电流波形
2.2节能实验
三相异步电动机满载或接近满载运行时,其运行效率最高,而当空载或轻载运行时,电动机效率则会下降。此外,工程技术人员在选用电动机时,通常也留有一定的负载裕量,因此,电动机满载运行工况较少,轻载运行状态较多,而节能实验就是主要针对电动机的空载或轻载运行。
根据异步电动机的等效电路,若忽略定子绕组的电阻及漏抗,有
U1=E1=4.44fNΦm
(1)
由于电源频率f、定子绕组的有效匝数N保持不变,故定子绕组相电压有效值U1及相电势有效值E1均正比于每极磁通m,因此,降低实际施加在电动机定子绕组的端电压,就可减小每极磁通m,进而可降低气隙磁通密度Bm。由于电动机的铁芯损耗,因此,电动机在轻载或空载运行时,降低电机定子绕组端电压可有效减少铁芯损耗,达到调压节能效果。为获得较明显的节能控制效果,目前采用的优化定子绕组端电压的控制策略主要有恒功率因数控制、最小定子电流控制、最小功率因数角控制及最小定子输入功率控制等[10-13]。从易于学生实验的角度出发,本次实验中,采用最小功率因数角控制。
需要说明的是,随着负载增加,电动机的电枢电流增大,电动机铜耗所占比例逐渐成为电动机损耗的主要部分,可变损耗大于不变损耗,电动机的效率会降低,若一味采用调压方式并不能达到预期节能效果,因此本实验中,取负载率为0.5作为节能运行和常规运行的分界点。
节能实验的步骤如下:
(1) 电动机空载节能运行,用示波器捕捉并记录电动机定子绕组端电压波形,用电流钳记录电流波形,观察调压后电动机的端电压及电流波形变化,运行一段时间后,读取电表数值,计算耗电量;
(2) 直接施加电网电压至电动机,常规空载运行,记录耗电量并与节能运行时比较,分析节能效果;
(3) 电动机负载运行,调节磁粉制动器负载,观察电压及电流波形,运行一段时间后,读取电表数值,计算耗电量;直接施加电网电压至电动机,分别以相同的负载率常规运行,记录耗电量并与节能运行时比较,分析节能效果。
图8为空载及0.2倍负载节能运行时的定子电压及电流波形。可以发现,随着负载的增加,触发角逐渐变小,施加于定子绕组的电压及电枢电流随之增加,且其正弦度也越来越高。表1给出了空载及0.5倍负载节能运行与常规运行时的能量消耗比较。可以发现,电动机空载运行时,节能效果显著,可达50%;随着负载率的增加,节能效果逐渐降低,当负载率达到0.5左右时,节能运行和常规运行的耗电量相同,无明显节能效果。
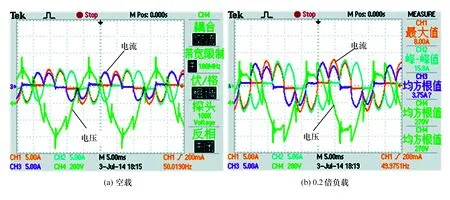
图8 异步电动机节能运行时电压及电流波形

负载运行时间/h耗电量/(kW·h)空载常规运行10.4空载节能运行10.20.5倍负载常规运行13.40.5倍负载常规运行13.4
3 结语
本文研制的异步电动机动态节能综合实验平台紧密结合工程实际,将实验教学与工业生产中的节能降耗这一难题有机统一,实现了产学研相结合。实验平台所提供的软启动及动态节能实验,可使学生深刻掌握影响异步电动机铁心损耗的基本因素、调压调速机械特性以及异步电动机轻载节能运行原理等工程实际问题,能有效提高学生综合运用专业知识的能力。
References)
[1] 顾绳谷.电机与拖动基础[M].北京:机械工业出版社,2009.
[2] 汤蕴璆. 电机学[M]. 北京:机械工业出版社,2014.
[3] 王庆九,朱新杰,顾大强,等.基于双CPU的电子凸轮综合实验台开发[J].实验技术与管理,2014,31(5):118-121.
[4] 蒯松岩,孙文兵,马金洋,等. 基于双处理器的开关磁阻电机综合实验平台开发[J]. 实验技术与管理,2015,32(5):94-97,100.
[5] 卢慧芬,林斌,孙丹,等. DSP电机控制综合实验平台研制[J]. 实验技术与管理,2014,31(10):97-102.
[6] 孙建济,王建民. 异步电动机软起动装置中管压降信号的检测与触发电路[J]. 电工技术杂志,2003(8):52-55.
[7] 王毅,赵凯岐,徐殿国. 电机软起动控制系统中功率因数角的研究[J]. 中国电机工程学报,2002,22(8):82-87.
[8] 王玉峰,马广程,王常虹,等. 晶闸管控制感应电机起动过程中震荡现象研究[J]. 电机与控制学报,2002,6(3):186-190.
[9] 孙建济,房建成,王建民. 异步电动机起动过程中的震荡[J]. 电工技术学报,2007,22(2):15-21.
[10] 贺益康,夏劲雄. 异步电机轻载调压节能控制策略的仿真研究[J]. 电机与控制学报,1997,1(3):180-185.
[11] 程明,曹瑞武,胡国文,等. 异步电动机调压节能控制方法研究[J]. 电力自动化设备,2008(1):6-11.
[12] 朱常青,王秀和,申宁,等. 油田抽油机用感应电动机调压节能控制策略的研究[J]. 自动化学报,2007,33(7):749-752.
[13] 马莉丽,程文明,张则强. 铁路集装箱起重机异步电动机调压节能的优化方法[J]. 中国铁道科学,2012,33(1):126-132.
Development of comprehensive experiment platform of asynchronous motor for dynamic energy-saving
Wang Yubin, Ma Wenzhong
(College of Information and Control Engineering,China University of Petroleum, Qingdao 266580, China)
A comprehensive experimental platform of asynchronous motor used for dynamic energy-saving has been developed in order to satisfy comprehensive and research requirements of experiments for undergraduates. Since the asynchronous motor usually works with light loadings,according to the principle of energy-saving by regulating the voltage,the aim of dynamic energy-saving and soft starting can be achieved by designing appropriate power main circuit,driving circuit,signal detection circuit and control circuit. The application of this comprehensive experimental platform enriches the teaching contents of electrical machine course. Moreover,the practical ability of students can be improved effectively,hence,the good teaching effect can be obtained.
asynchronous motor; comprehensive experiment; dynamic energy-saving
DOI:10.16791/j.cnki.sjg.2016.06.021
2015-12-08
中国石油大学(华东)人才培养模式改革重大项目(JY-A201401);中国石油大学(华东)教学实验技术改革项目(SY-B201211)
王玉彬(1974—),男,山东利津,博士,副教授,研究方向为新型电机的设计、分析与控制.
E-mail:yubwang5190@163.com
G484; TM301.2
A
1002-4956(2016)6-0077-05
猜你喜欢
现代信息科技(2022年20期)2022-11-17
煤气与热力(2021年7期)2021-08-23
煤气与热力(2021年6期)2021-07-28
测控技术(2018年9期)2018-11-25
电子制作(2016年1期)2016-11-07
通信电源技术(2016年5期)2016-03-22
当代化工研究(2016年6期)2016-03-20
东北电力大学学报(2015年1期)2015-11-13
电子设计工程(2015年12期)2015-02-27
电测与仪表(2014年20期)2014-04-04
