基于无模型预测控制的无刷直流电机换相转矩波动抑制策略
2016-08-30 09:22:44史婷娜姜国凯夏长亮
电工技术学报 2016年15期
史婷娜 李 聪 姜国凯 夏长亮,2
(1.天津大学电气与自动化工程学院 天津 300072 2.天津工业大学 天津市电工电能新技术重点实验室 天津 300387)
基于无模型预测控制的无刷直流电机换相转矩波动抑制策略
史婷娜1李聪1姜国凯1夏长亮1,2
(1.天津大学电气与自动化工程学院天津300072 2.天津工业大学 天津市电工电能新技术重点实验室天津300387)
无刷直流电机工作时产生的换相转矩波动严重影响着其在高精度伺服系统中的应用。本文将无模型控制中的泛模型思想与预测控制相结合,提出一种无模型预测控制方法来抑制无刷直流电机换相时的转矩波动。通过推导无刷直流电机控制系统的泛模型的表达式,将泛模型作为预测模型,通过价值函数选择最优的开关状态,保持非换相相电流值恒定。实验结果证明,该方法能有效抑制电机在额定转速以下的高、低速情况下的换相转矩波动,控制过程中不需要精确的电机参数,算法简单,易于实现。
无刷直流电机转矩波动无模型预测控制价值函数
0 引言
无刷直流电机因其高效率、长寿命、低噪声和高可靠性等优点,在家用电器、汽车、航空等行业领域内得到了较好的发展[1-3]。无刷直流电机在运行过程中存在较大的转矩波动,包括换相引起的转矩波动、齿槽转矩波动、谐波转矩波动等,然而换相转矩波动幅值最大可达到平均转矩的50%左右,严重影响了电机的控制性能[3]。因此对无刷直流电机的换相转矩波动进行抑制一直是无刷直流电机领域的研究热点[4-14]。
学者Pillay P和Krishnan R于1989年在文献[6]中首次提到无刷直流电机的换相转矩波动问题。该文献阐述了由于绕组电感的作用使得换相时电流不能突变,导致换相转矩波动。针对换相转矩波动问题,国内外众多学者进行了深入研究。一类解决途径是通过改变逆变器直流侧输入电压的大小,使其与电机相反电动势幅值保持一定的比例关系,来达到抑制换相转矩波动的目的[7]。另一类解决途径是维持逆变器直流侧输入电压不变,通过控制电机换相过程中关断相电流下降速率和开通相电流上升速率相等,间接保持非换相电流恒定,从而达到抑制换相转矩波动的目的[8-12]。随着现代控制理论的发展,直接转矩控制以及许多其他的智能控制方法也被应用到无刷直流电机控制系统中来抑制换相转矩波动[12,13]。
其中通过控制换相过程中电流变化率来抑制换相转矩波动的主要方法有重叠换相法、脉宽调制(Pulse Width Modulation,PWM)法、滞环电流控制法和电流预测控制法等[5]。文献[8]指出电流换相时间及换相期间的电流波动与参考电流的幅值有关,并提出电流滞环控制方法控制开通相电流的上升速率来抑制低速情况下的换相转矩波动,该方法简单且快速性好,但在高速下的转矩波动抑制效果不是很好。文献[9]提出了一种基于单电流传感器的最小差拍电流控制策略,该方法在换相过程中通过恰当的占空比控制,保证了开通相电流上升速率和关断相电流下降速率相等,取得了较好的抑制换相转矩波动的效果。文献[10]采用电流预测策略计算换相过程中的占空比,对开通相和关断相电流进行控制,较好地实现了换相转矩波动抑制,但是高、低速两种情况下需采用不同的控制策略。文献[11]基于预测控制理论,将定子电流的预测控制分为预测模型的建立、反馈校正和滚动优化三个步骤,以非换相相电流为控制目标,较好地抑制了换相转矩波动。文献[12]通过对PWM周期进行划分,在不同的时间段实施不同的调制策略来控制三相绕组的电流变化率,分别在高、低速下选择不同的占空比计算方案,达到抑制换相转矩波动的目的。
本文提出一种无刷直流电机无模型预测控制方法来抑制换相转矩波动。该方法将无模型控制中的泛模型思想与预测控制相结合,将推导出的无刷直流电机控制系统的泛模型作为预测模型,通过价值函数选择最优的开关状态,保持非换相相电流值恒定。实验证明,该方法能有效抑制额定转速以下的高、低速情况下的换相转矩波动,控制过程中不需要精确的电机参数,适用于电机全速度范围,算法简单,易于实现。
1 无刷直流电机换相转矩波动分析
1.1无刷直流电机数学模型
无刷直流电机控制系统一般采用三相电压型逆变器,电机采用三相六步各相轮流导通120°的控制方式,其等效电路如图1所示。
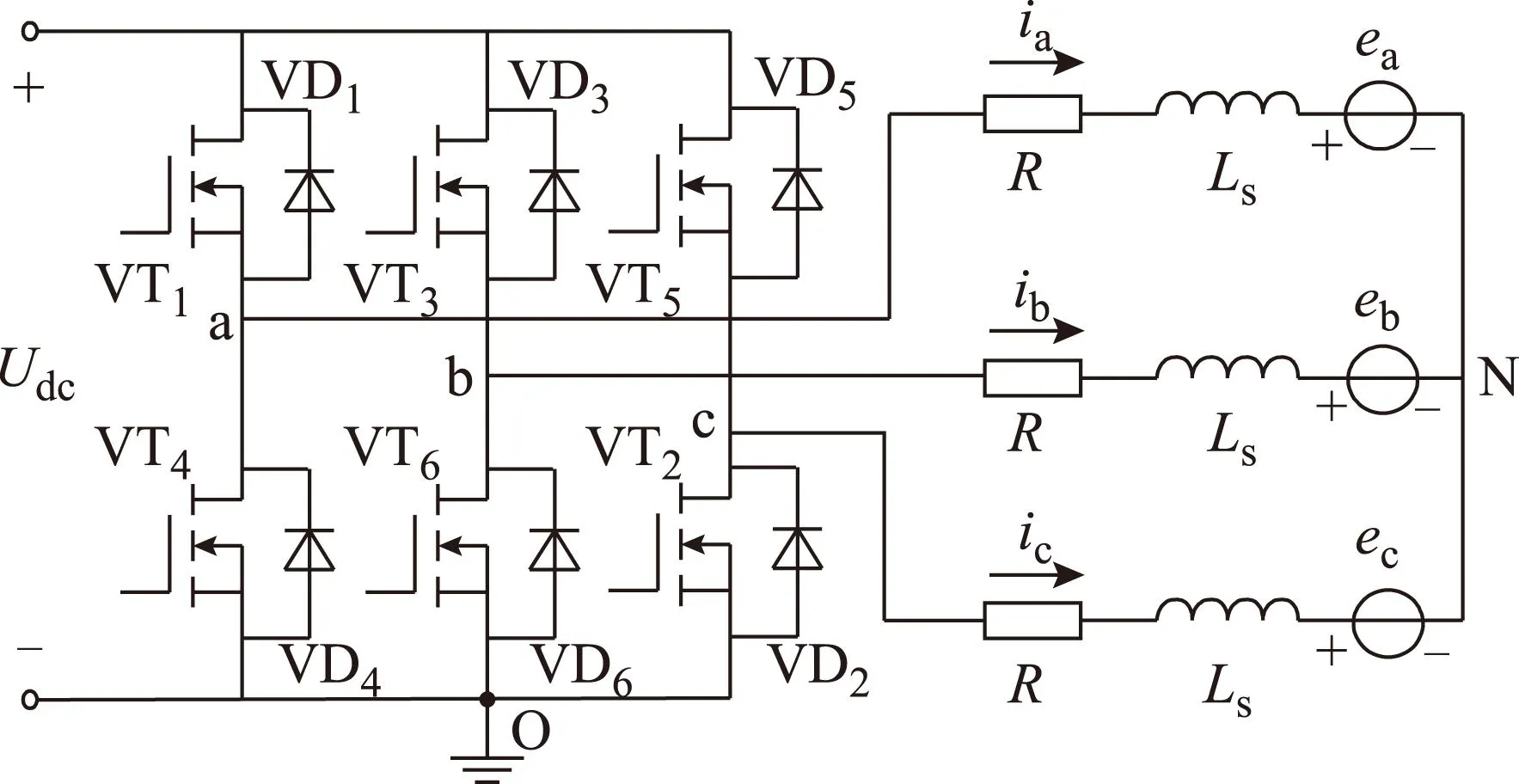
图1 无刷直流电机三相桥逆变电路Fig.1 Brushless DC motor three-phase bridge inverter circuit
在实际应用中,通常无刷直流电机不提供中性点,电机的端电压难以直接检测,故常采用式(1)所示数学模型。
(1)
式中,uaO、ubO、ucO分别为电机定子三相绕组端对功率地电压;uNO为电机中性点对功率地电压;ia、ib、ic分别为三相电流;ea、eb、ec分别为三相反电动势;R为定子绕组的等效电阻;Ls为定子绕组的等效电感。
无刷直流电机的电磁转矩为
(2)
式中,ω为转子机械角速度。
1.2无刷直流电机换相转矩波动
由于无刷直流电机绕组电感的存在,在换相过程中关断相和开通相电流变化率不相等,使得非换相绕组电流在换相期间发生变化,进而影响电磁转矩。
电机在不同的速度区间,换相过程的电流变化情况如图2所示。
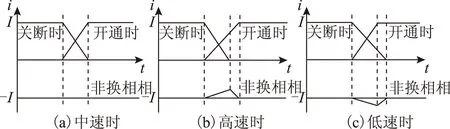
图2 三种换相过程电流变化情况Fig.2 The three conditions of current commutation process change
在图2a中,关断相和开通相的电流变换率相等,非换相相电流保持恒定,此时电磁转矩为一恒定值,不会发生换相转矩波动现象;图2b中,换相时关断相电流下降到零时,开通相电流还未达到稳态值,在这种情况下,非换相相电流值减小,将会引起电机的电磁转矩减小;图2c中,换相时关断相电流还未下降到零时,开通相电流已达到稳态值,在这种情况下,非换相相电流值增大,将会引起电机的电磁转矩增大。
令x,y,z表示电机三相绕组,x,y,z∈(a,b,c)。在换相期间,以z相为非换相相,x相为关断相,y相为开通相为例。假设各相绕组反电动势幅值在换相期间均保持恒值E不变,由ix+iy+iz=0和式(2)可知,换相期间电磁转矩为
(3)
由以上分析可知,在假设反电动势不变的基础上,换相转矩与非换相相电流值成正比,因此采用非换相相电流作为换相转矩的衡量标准,若非换相相电流在换相期间保持恒定,则可以有效抑制电机的换相转矩波动。
2 无刷直流电机换相转矩波动抑制策略
2.1无刷直流电机无模型预测控制策略
无模型控制策略是一种实现建模控制一体化的控制方法,无模型控制器采用的是“泛模型”和一些“控制功能”相结合的设计方法。系统的泛模型的表达式为[14]
y(k+1)-y(k)=φ(k)[v(k)-v(k-1)]
(4)
式中,y(k)表示系统的输出;v(k)表示系统的输入;φ(k)表示泛模型的特征参量。
无模型预测控制算法借鉴无模型控制器的泛模型思想,将泛模型作为预测模型,是一种无模型控制和预测控制相融合的算法。对于无刷直流电机控制系统而言,在换相期间对非换相相电流进行控制,将非换相相电流值作为控制器的输入,待预测的未来时刻的电流值作为控制器的输出,下面针对无刷直流电机特有的运行方式,推导其泛模型及特征向量表达式。
在换相期间,以z相为非换相相,x相为关断相,y相为开通相为例。将无刷直流电机数学模型式(1)进行整理,得到
(5)
将式(5)离散化可得到kTs时刻z相电流表达式为
(6)
式中,Ts为采样时间。
e(k)=ex(k)+ey(k)-2ez(k)
(7)
u(k)=uxO(k)+uyO(k)-2uzO(k)
(8)
同理可得(k+1)Ts时刻的z相电流为
(9)
由式(6)和式(9)可得
(10)
[iz(k+1)-iz(k)]-[iz(k)-iz(k-1)]
(11)
同理可进一步推得
(12)
由式(12)可以看出,在换相期间,非换相z相电流值与电机的反电动势值以及端电压值有关。将式(12)整理可得
[iz(k+1)-iz(k)]-[iz(k)-iz(k-1)]=φ(k)·
{[iz(k)-iz(k-1)]-[iz(k-1)-iz(k-2)]}
(13)
进而可得非换相相z相电流在(k+1)Ts时刻的预测值为iz(k+1)=φ(k)[iz(k)-2iz(k-1)+iz(k-2)]+
[2iz(k)-iz(k-1)]
(14)
将式(13)作为无刷直流电机控制系统的泛模型,其中,泛模型的特征参量可以为

(15)
由以上分析可知,无刷直流电机在换相期间,非换相相在(k+1)Ts时刻的预测电流值受电机三相绕组的端电压和反电动势影响。而三相反电动势的值受转速影响,三相绕组的端电压则由三相逆变桥的开关导通状态决定。因此,只要在kTs时刻合理选择功率开关管的导通状态,就可以得到(k+1)Ts时刻的最优电流值,即使非换相相电流变化最小,进而保持电磁转矩变化最小。
将上文中推导的无刷直流电机的泛模型作为预测模型,代替传统预测控制中的含电机电阻、电感参数的精确系统数学模型,通过定义的价值函数来选择最恰当的开关导通状态,得到未来时刻的最优电流值。无刷直流电机在运行过程中由速度环得到电流参考值。换相期间,在kTs时刻预测(k+1)Ts时刻的非换相相电流值,由于采样间隔非常短,可以认为iref(k+1)≈iref(k), 所以定义价值函数为
(16)

2.2换相模式
无刷直流电机在运行过程中采用两两导通的控制方式,每隔60°电角度改变一次导通状态,每个开关管导通120°电角度。每改变一次状态,关断相开关管关断,开通相开关管开通,非换相相开关管状态保持不变。在一个运行周期中存在六种换相模式,见表1所示。例如在换相模式Ⅰ时,功率开关管VT1关断,对应A相上桥臂关断;功率开关管VT3开通,对应B相上桥臂开通;功率开关管VT2保持不变,对应C相下桥臂保持不变。
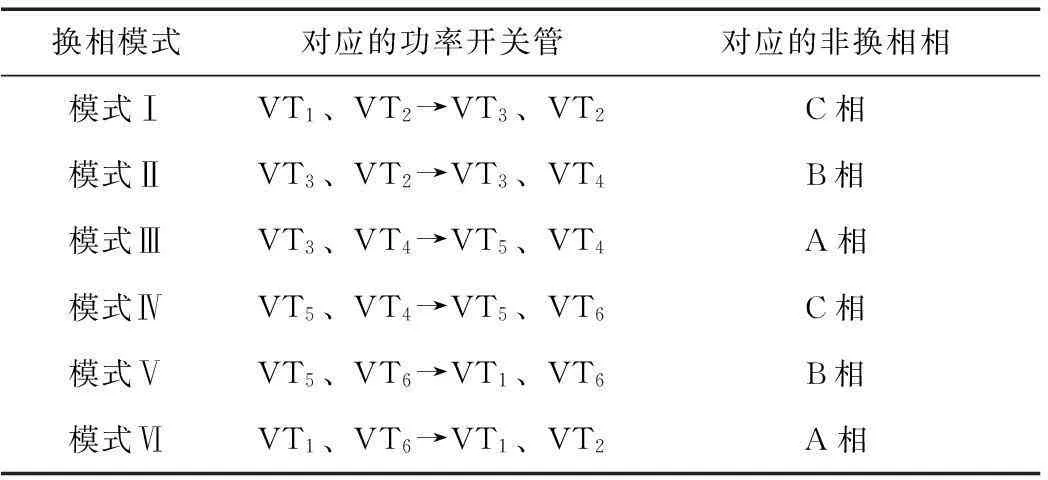
表1 换相模式Tab.1 Commutation mode
定义逆变电路中功率开关管的状态为Si(VT1VT2VT3VT4VT5VT6),功率开关管开通用“1”表示,关断用“0”表示。在换相过程中,保持开通相恒通,对关断相和非换相相的功率开关管进行PWM控制来保持非换相相绕组电流维持不变,因此在任一模式下都有四种电路导通状态。以模式Ⅰ为例,分别为:S1(001000)、S2(011000)、S3(101000)、S4(111000)。不同的开关状态下对应的每相绕组的端电压不同。例如,在S1(001000)时,电路的导通情况如图3所示。此时对应的端电压为u1=[uaOubOucO]T=[0UdcUdc]T。
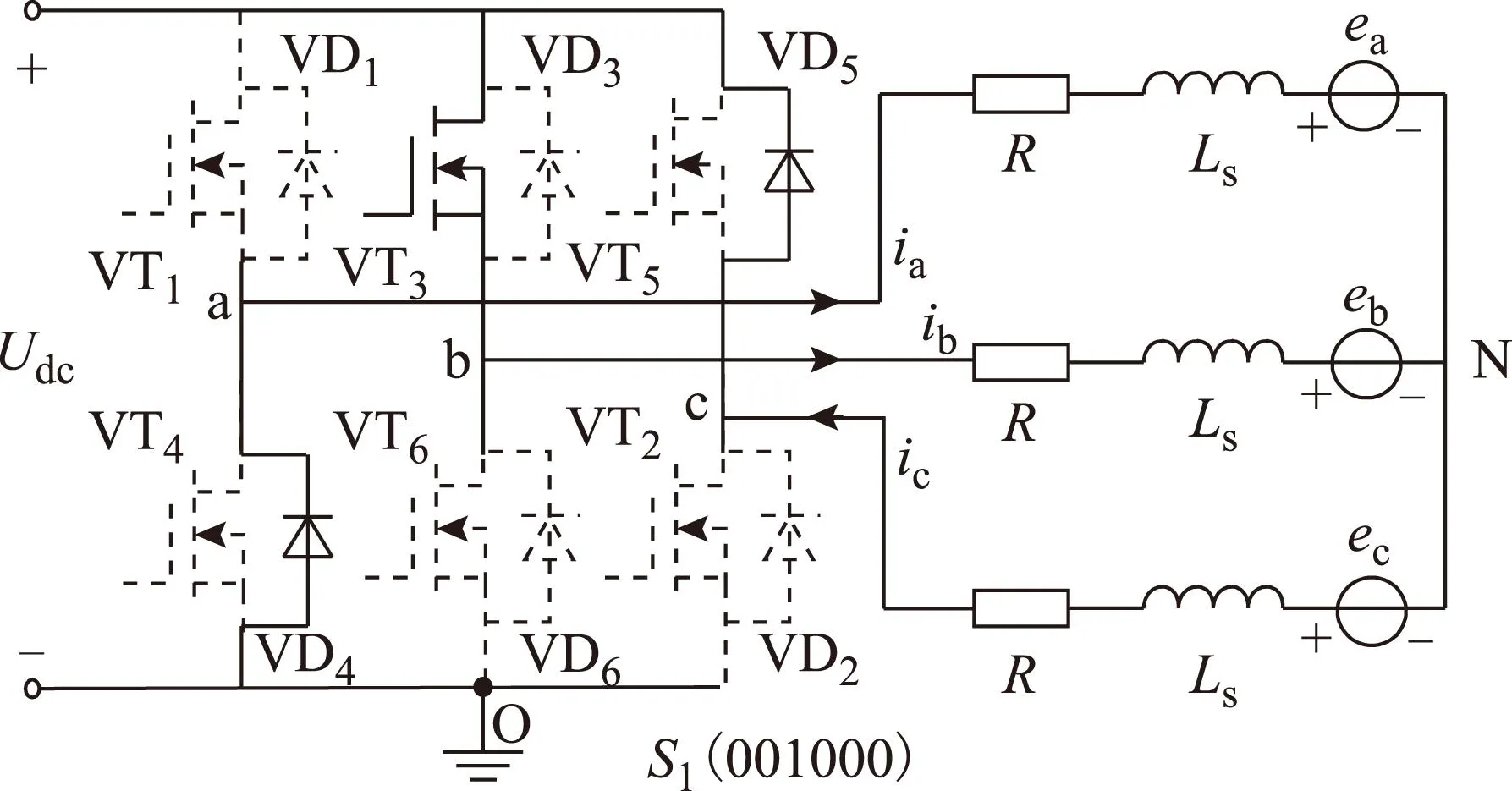
图3 无刷直流电机换相过程示意图Fig.3 The schematic diagram of Brushless DC motor commutation process
在不同的换相模式下,选择不同的开关状态时对应不同的端电压值,由式(14)可以计算得到下一采样时刻的非换相相电流预测值,根据价值函数式(16)可以选取最优的开关状态。
2.3无刷直流电机无模型预测控制系统
图4为基于无模型预测控制的无刷直流电机系统框图。控制系统采用速度、电流双闭环PI控制,在电流环中加入本文提出的无模型预测控制算法。以霍尔信号跳变时刻作为换相开始时刻,以关断相电流下降到零时刻作为换相结束时刻。无刷直流电机的反电动势随转子位置角呈梯形分布,其平顶部分的幅值为E=Ken,n表示转速,Ke表示反电动势系数。在换相过程中,可以由电机转速和反电动势波形函数计算得到各个时刻的三相反电动势值,由电流传感器采样得到各个时刻的三相电流值,由三相逆变桥的功率开关管的导通状态得到三相端电压值,由系统的速度环得到非换相相电流参考值。

图4 基于无模型预测控制的无刷直流电机系统框图Fig.4 Block diagram of the BLDCM drive system with model free predictive control
3 实验结果
实验平台如图5所示,采用TI公司的DSP芯片TMS320F28335作为主控芯片,系统频率为150 MHz,中断频率和采样频率为25 kHz,无刷直流电机参数见表2。电机的负载由一台磁滞测功机提供,并能实时显示转速和转矩。电机的三相电流由电流传感器采样后输出,电磁转矩根据式(2)计算后由DAC转换电路输出。
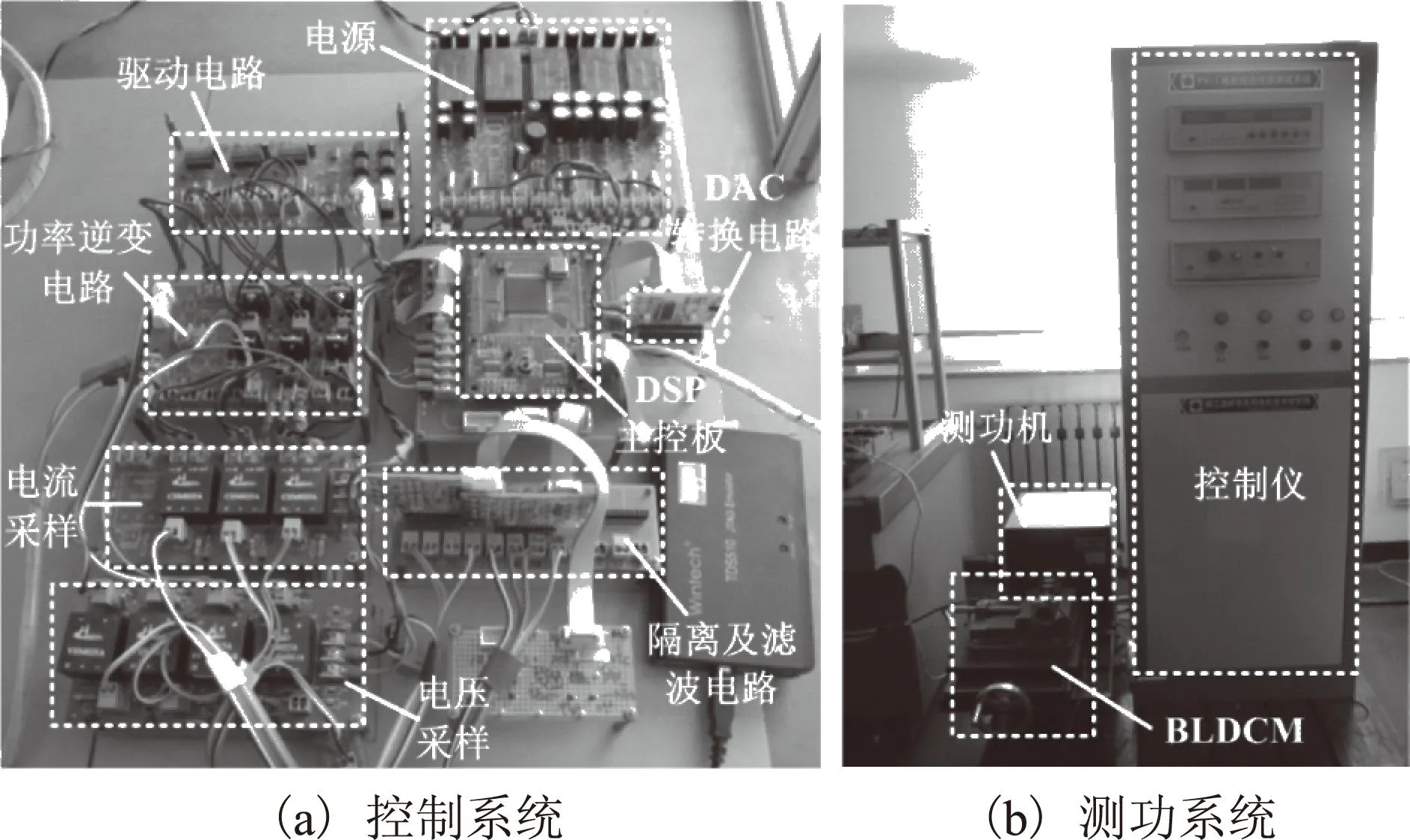
图5 实验平台Fig.5 Experimental platform
针对本文提出的无模型预测控制方法分别在额定转速以下的低速和高速条件下做了无刷直流电机换相转矩波动抑制的实验,实验结果及分析如下。
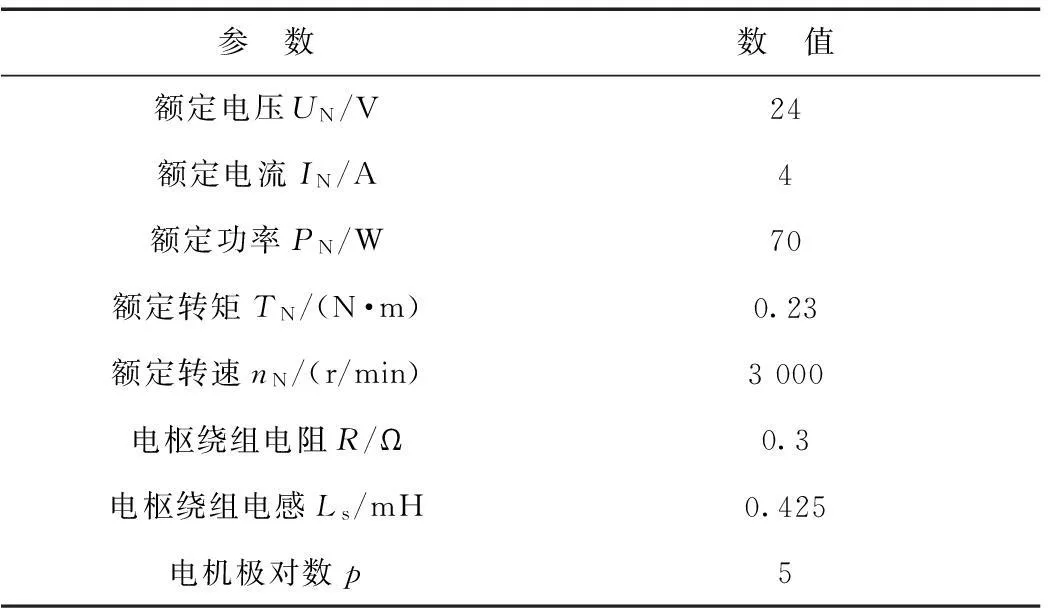
表2 无刷直流电机参数Tab.2 Parameters of BLDCM
图6为无刷直流电机在TL=0.23 N·m、额定转速以下的低速条件下未加入无模型预测控制,速度、电流双闭环PI控制时的三相电流、电磁转矩、三相端电压以及三相反电动势实验波形。图7是加入无模型预测控制时的实验波形。由图6可以看出,未加入无模型预测控制时,在换相期间,由于关断相电流下降速率小于开通相电流上升速率,导致非换相相电流波动较大,因此引起较大的换相转矩波动。由于实验中采用的脉宽调制方式是上桥臂调制下桥臂恒通,因此上桥臂换相时的电磁转矩波动要小于下桥臂换相时的电磁转矩波动,如图6a中的H和L所示。图中给出了三相反电动势的实验波形,由于加工制造等原因,实际的反电动势波形不是理想的梯形波,如图中所示。在加入本文提出的无模型预测控制方法后,由图7可以看出电流变化平稳,电磁转矩波动明显减小。图6b和图7b分别是电流和电压实验波形的局部放大图。可以看出,加入无模型预测控制后,在额定转速以下的低速时对非换相相的功率开关管进行控制,在关断相电流下降到0时,开通相电流达到稳态值,因而非换相相电流可以保持恒定,达到抑制换相转矩波动的目的。
在换相的初始时刻,由于DSP对电机运行过程中历史时刻的电流、电压和反电动势值都进行了存储,虽然前两个时刻是两相导通情况,但由于本文提出的无模型预测控制方法具有一般性,能同时适用于非换相期间和换相期间,因此在换相的初始时刻,可以调用前两个时刻的电流值、反电动势值和端电压值。以图7b为例,对应换相模式Ⅰ,CP表示换相间隔。换相前A相下桥臂恒通,B相悬空,C相上桥臂调制,故由开关状态(010010),可得换相前一时刻的三相端电压值。非换相相(C相)电流值由电流传感器测得,三相反电动势值离线得到。
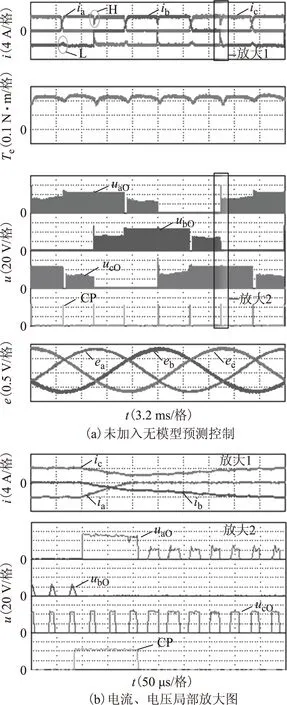
图6 在额定转速以下的低速条件下未加入无模型预测控制方法的实验波形Fig.6 Waveforms for method without model free predictive control in the condition of low speed
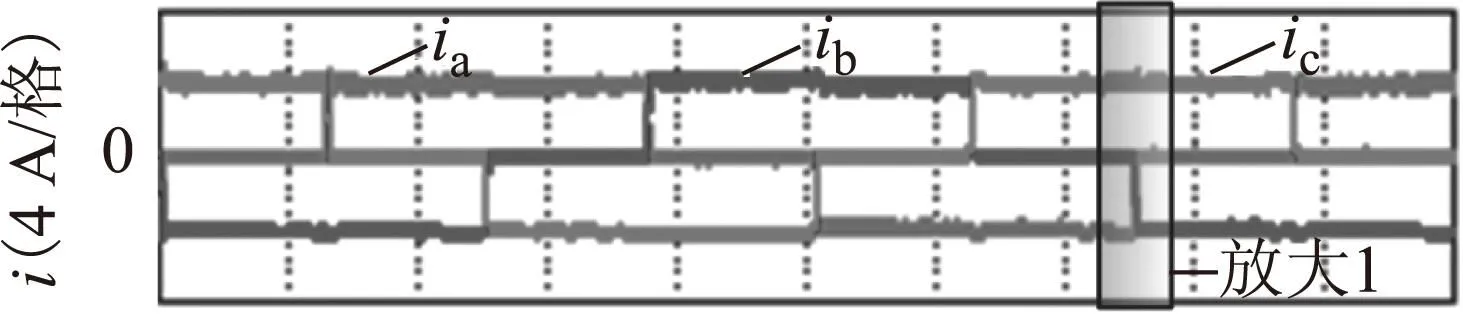
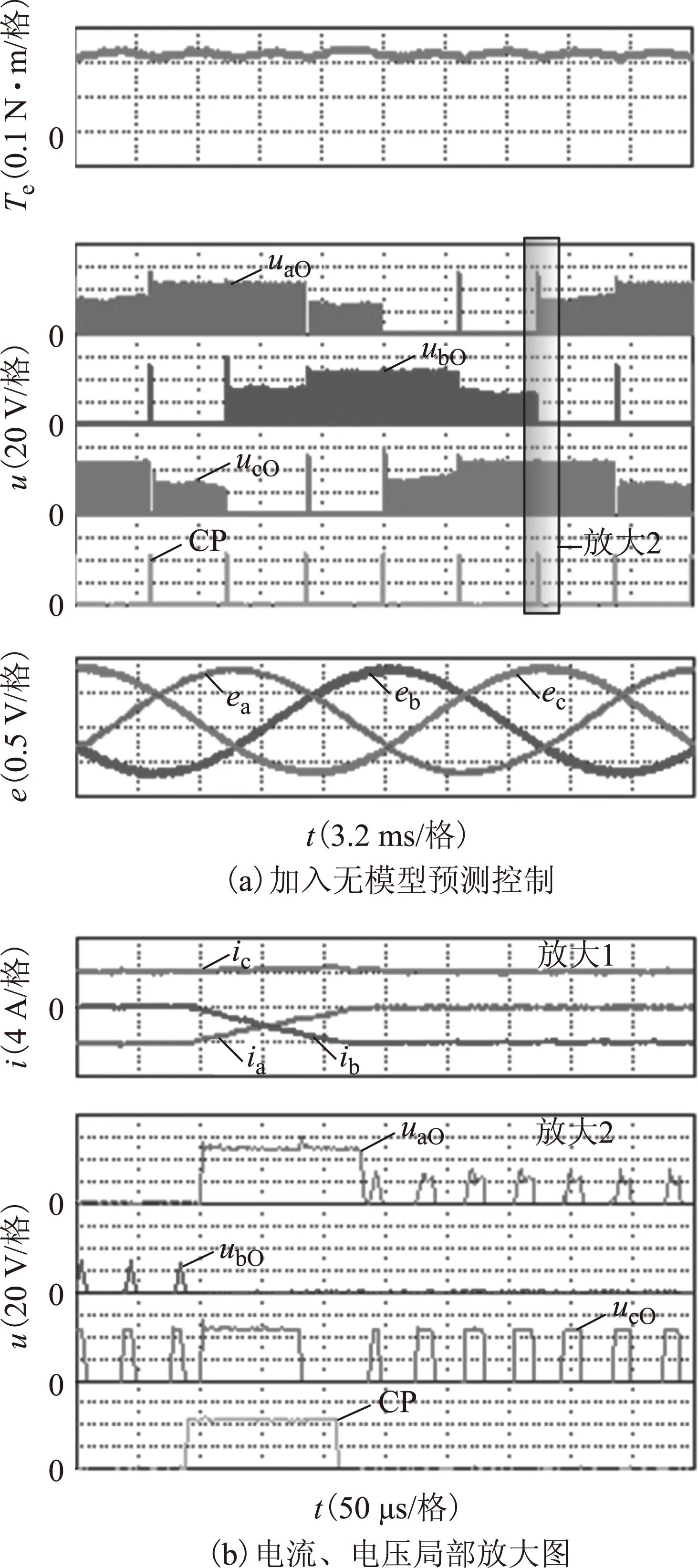
图7 在额定转速以下的低速条件下加入无模型预测控制方法的实验波形Fig.7 Waveforms for method with model free predictive control in the condition of low speed
图8为无刷直流电机在TL=0.23 N·m,额定转速以下的高速条件下未加入无模型预测控制,速度、电流双闭环PI控制时的三相电流、电磁转矩、三相端电压以及三相反电动势实验波形。图9是加入无模型预测控制时的实验波形。对比图8和图9可以看出,在额定转速以下的高速下,采用无模型预测控制可以较好地抑制换相过程引起的转矩波动。在额定转速以下的高速下无模型预测控制方法也可以控制三相绕组电流变化率,使开通相电流上升速率与关断相电流下降速率保持一致,即对关断相和非换相相的功率开关管进行控制,进而减小非换相相绕组电流波动,达到抑制换相转矩波动的目的。

图8 在额定转速以下的高速条件下未加入无模型预测控制方法的实验波形Fig.8 Waveforms for method without model free predictive control in the condition of high speed

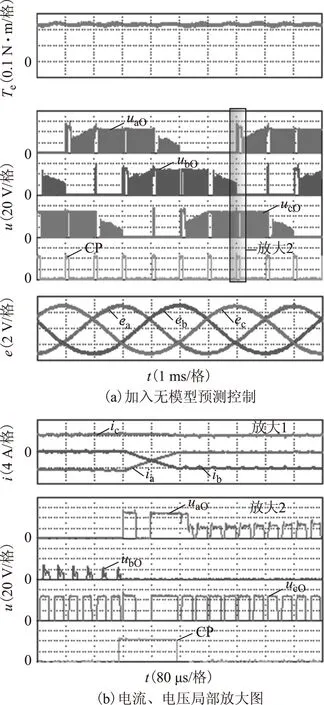
图9 在额定转速以下的高速条件下加入无模型预测控制方法的实验波形Fig.9 Waveforms for method with model free predictive control in the condition of high speed
4 结论
本文针对无刷直流电机运行过程中存在较大换相转矩波动的问题,提出了一种无模型预测控制方法,推导了无刷直流电机的泛模型表达式。控制过程中不需要精准的电机电感及电阻参数,解决了实际应用中电阻值和电感值测量困难且不准确的问题。无模型预测控制方法可以适用于无刷直流电机全速范围内的换相转矩波动抑制,在额定转速以下的高速、低速下无需切换,算法简单易实现。
[1]崔臣君,刘刚,郑世强.基于线反电动势的高速磁悬浮无刷直流电机无位置换相策略[J].电工技术学报,2014,29(9):119-128.
Cui Chenjun,Liu Gang,Zheng Shiqiang.Commutation strategy of high-speed maglev brushless DC motors based on the line-to-line back-EMF without position sensor[J].Transactions of China Electrotechnical Society,2014,29(9):119-128.
[2]夏长亮.无刷直流电机控制系统[M].北京:科学出版社,2009.
[3]谭建成.永磁无刷直流电机技术[M].北京:机械工业出版社,2011.
[4]王大方,卜德明,朱成,等.一种减小无刷直流电机换相转矩脉动的调制方法[J].电工技术学报,2014,29(5):160-165.
Wang Dafang,Bu Deming,Zhu Cheng,et al.A modulation method to decrease commutation torque ripple of brushless DC motors[J].Transactions of China Electrotechnical Society,2014,29(5):160-165.
[5]李珍国,章松发,周生海,等.考虑转矩脉动最小化的无刷直流电机直接转矩控制系统[J].电工技术学报,2014,29(1):139-146.
Li Zhenguo,Zhang Songfa,Zhou Shenghai,et al.Direct torque control of brushless DC motor considering torque ripple minimization[J].Transactions of China Electrotechnical Society,2014,29(1):139-146.
[6]Pillay P,Krishnan R.Modeling,simulation,and analysis of permanent-magnet motor drives,Part Ⅱ:the brushless DC motor drive[J].IEEE Transactions on Industry Applications,1989,25(2):274-279.
[7]Shi Tingna,Guo Yuntao,Song Peng.A new approach of minimizing commutation torque ripple for brushless DC motor based on DC-DC converter[J].IEEE Transactions on Industrial Electronics,2010,57(10):3483-3490.
[8]Kim G H,Kang S J,Won J S.Analysis of the commutation torque ripple effect for BLDCM fed by HCRPWM-VSI[C]//Proceedings of IEEE Conference on Applied Power Electronics Conference and Exposition,Boston,1992:277-284.
[9]Song J H,Choy I.Commutation torque ripple reduction in brushless DC motor drives using a single DC current sensor[J].IEEE Transactions on Power Electronics,2004,19(2):312-319.
[10]林平,韦鲲,张仲超.新型无刷直流电机换相转矩脉动的抑制控制方法[J].中国电机工程学报,2005,26(3):153-158.
Lin Ping,Wei Kun,Zhang Zhongchao.A novel control scheme to suppress the commutation torque ripple in BLDCM[J].Proceedings of the CSEE,2005,26(3):153-158.
[11]李自成,尹周平,熊有伦.无刷直流电机换相转矩脉动分析及抑制[J].华中科技大学学报(自然科学版),2012,40(2):74-78.
Li Zicheng,Yin Zhouping,Xiong Youlun.Analysis and reduction of torque ripple in brushless DC motorings[J].Journal of Huazhong University of Science & Technical(Natural Science Edition),2012,40(2):74-78.
[12]Shi Jian,Li TieCai.New Method to eliminate commutation torque ripple of brushless DC motor with minimum commutation time[J].IEEE Transactions on Industrial Electronics,2013,60(6):2139-2146.
[13]夏长亮,张茂华,王迎发,等.永磁无刷直流电机直接转矩控制[J].中国电机工程学报,2008,28(6):104-109.
Xia Changliang,Zhang Maohua,Wang Yingfa,et al.The direct torque control for permanent magnet brushless DC motors[J].Proceedings of the CSEE,2008,28(6):104-109.
[14]Bu X,Hou Z,Yu F,et al.Robust model free adaptive control with measurement disturbance[J].IET Control Theory and Applications,2012,6(9):1288-1296.
Model Free Predictive Control Method to Suppress Commutation Torque Ripple for Brushless DC Motor
Shi Tingna1Li Cong1Jiang Guokai1Xia Changliang1,2
(1.School of Electrical Engineering and AutomationTianjin UniversityTianjin300072China 2.Tianjin Key Laboratory of Advanced Technology of Electrical Engineering and Energy Tianjin Polytechnic UniversityTianjin300387China)
The torque ripple of brushless DC motor (BLDCM) generated in the commutation process seriously affects their applications in the precision servo system.This paper presents a model free predictive control method,which combines the universal model and the predictive control,to suppress the commutation torque ripple of the BLDCM.In this paper,the expression of the universal model of the brushless DC motor control system is derived.By taking the universal model as the predictive model to select the optimal switch state through the value function,the non-commutation phase current can be kept constant.The experimental results show that the proposed method can effectively suppress the commutation torque ripple of the BLDCM in both low and high speeds under the rated speed.Since parameters of electric machines are not necessary in the proposed control process,the algorithm is simple and easy to realize.
Brushless DC motor,torque ripple,model free predictive control,value function
2014-07-23改稿日期2014-12-15
史婷娜女,1969年生,教授,博士生导师,研究方向为电机及其控制。
E-mail:tnshi@tju.edu.cn(通信作者)
李聪女,1990年生,硕士,研究方向为无刷直流电机及其控制。
E-mail:licong2012@tju.edu.cn
国家重点基础研究发展计划(973计划)(2013CB035600)资助项目。
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
大电机技术(2022年5期)2022-11-17 08:12:56
日用电器(2022年4期)2022-05-26 03:51:28
现代仪器与医疗(2021年6期)2022-01-18 03:22:48
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
大众科学·上旬(2020年2期)2020-03-30 03:51:17
电子制作(2017年1期)2017-05-17 03:54:12
农业科技与装备(2016年5期)2016-08-15 10:20:48
淮南师范学院学报(2015年3期)2015-03-22 01:16:17