
基于无迹卡尔曼滤波的车辆重心高度在线估计*
2016-08-29 04:35褚端峰吴超仲胡钊政裴晓飞
武汉理工大学学报(交通科学与工程版) 2016年4期
褚端峰 田 飞 吴超仲 胡钊政 裴晓飞
(武汉理工大学智能交通系统研究中心1) 武汉 430063) (车路协同与安全控制北京市重点实验室2) 北京 100191) (水路公路交通安全控制与装备教育部工程研究中心3) 武汉 430063) (武汉理工大学汽车工程学院4) 武汉 430070)
基于无迹卡尔曼滤波的车辆重心高度在线估计*
褚端峰1,2,3)田飞1, 3)吴超仲1, 3)胡钊政1, 3)裴晓飞4)
(武汉理工大学智能交通系统研究中心1)武汉430063)(车路协同与安全控制北京市重点实验室2)北京100191)(水路公路交通安全控制与装备教育部工程研究中心3)武汉430063)(武汉理工大学汽车工程学院4)武汉430070)
重型货车的载重变化会引起重心高度发生明显漂移,而准确、及时地获取车辆重心高度,对于车辆主动安全系统至关重要.文中基于无迹卡尔曼滤波方法,结合车辆三自由度动力学模型,通过传感器采集车速、前后轮速等,实现对车辆重心高度的在线估计.通过TruckSim与MATLAB/Simulink的联合仿真实验表明,车辆重心高度的估计结果能在较短时间内逼近真实值,且稳态平均误差控制在12%以内,对车辆主动安全控制具有重要意义.
重心高度;参数估计;无迹卡尔曼滤波;车辆动力学
对于重型货车而言,载重变化会对整车质量产生显著影响,进而也会导致车辆重心位置发生明显漂移[1].车辆重心位置对于车辆主动安全有着较大影响,若无法实时获取这些信息,必将影响车辆主动安全预警及控制的有效性[2].传统的车辆重心高度测量方法主要通过对车辆进行倾斜、偏转等操作,从而测量车辆相关部件的尺寸、受力等,并运用静力学方法求解重心高度[3].该方法可较准确地获得车辆静态时的重心高度值,但其测量过程决定了这种方法无法应用到正在运行、且载重变化较大的车辆中,从而也就无法进行重心高度的在线测量.因此,对于车辆运行过程中的重心高度获取,须借助传感器测量或参数估计的方法.
目前,在汽车主动安全领域,车辆参数的在线获取方法主要分为三类[4].一是利用低成本的车载传感器对测量信号进行数学推算,以获取车辆参数或运动状态,这种测量方法的特点是成本低,但由于低成本的传感器精度较低,从而存在较大的测量误差,容易降低测量效果[5];二是利用高精度传感器对车辆运行状态进行直接测量(如高精度的定位系统等),此方法虽可取得较高的测量精度,但价格昂贵,无法进行大范围的推广应用[6];第三种方法是模型法,即通过车辆动力学建模及分析,同时将低成本车载传感器采集信息作为观测量,进而利用适当的滤波估计算法实现对车辆参数或运动状态的在线估计.模型法可实现对难以直接测量的参数或运动状态进行估计,且成本一般较低.Huang等[7-8]在车辆质量与轴距、重心纵向位置等结构参数可知的情况下,分别利用线性卡尔曼滤波、自适应扩展卡尔曼滤波方法,对车辆重心高度进行了在线估计,取得了一定的实验效果.Rajamani等[9]通过采集车辆侧倾角速度、侧倾角度等动态信息,并在精确的侧倾动力学模型基础上,利用带有可变遗忘因子的递推最小二乘法,实现对车辆重心高度的在线估计.Hong等[10]利用双卡尔曼滤波,在四轮非线性车辆动力学模型的基础上实现对车辆重心位置、簧载质量、横摆转动惯量等结构参数的在线估计.Yue等[11]考虑车辆制动时的重心高度变化,利用平板式汽车制动实验台,通过采集车辆制动时的轴荷与制动力来实时估计重心高度.
文中在考虑车辆纵向、前后轮旋转等三自由度动力学模型基础上,建立基于无迹卡尔曼滤波(unscented Kalman filter, UKF)的车辆重心高度在线估计方法.该方法采用线性的车辆动力学模型,简化了在线估计算法的运算量.同时,只需通过传感采集车辆运动过程中的车速、前后轮速等,即可通过无迹卡尔曼滤波方法实现对车辆重心高度的在线估计.
1 车辆三自由度动力学模型
构建车辆三自由度动力学模型,见图1.包括车辆的纵向运动、前后轮旋转运动,具体如下
(1)
(2)
(3)式中:m为整车质量;vx为纵向速度;Fxf,Fxr分别为车辆前后轮的纵向力;Fa为空气阻力;g为重力加速度;φ为道路纵坡;J为车轮转动惯量;wf,wr分别为前后轮角速度;Tf,Tr为前后轮转矩;Trf,Trr为前后车轮滚动阻力矩;r为车轮等效半径,并假设前后车轮半径相同.
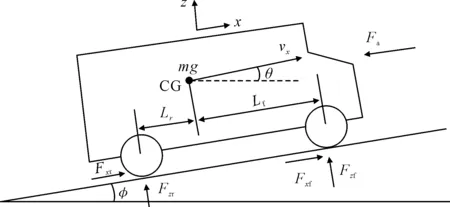
图1 车辆的三自由度动力学模型
同时,采用线性轮胎模型求解轮胎纵向力
(4)
(5)
式中:wf、wr分别为前后车轮转动角速度;r为车轮等效半径.
(6)式中:Ca为空气阻力系数.
前后车轮滚动阻力矩Trf,Trr的计算公式如下
(7)式中:γ为轮胎滚动阻力系数.
在存在道路纵坡的情况下,车辆前后轮胎的垂向力计算公式如下
(8)
(9)
式中:β为等效加速度.
(10)
式中:az为车辆沿垂向运动的加速度;l为前后轴距,l=lf+lr;ax为纵向加速度;车辆垂向加速度采用如下公式计算
(11)
2 基于无迹卡尔曼滤波的车辆参数估计算法
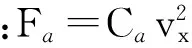
不同于扩展卡尔曼滤波(extended Kalman filter, EKF),无迹卡尔曼滤波并不对非线性动力学模型进行近似处理,而是对状态的概率密度函数进行近似处理.该算法以无迹变换(unscented transform)为基础,采用卡尔曼滤波框架,采样形式为确定性采样.无迹卡尔曼滤波的算法流程见图2.
图2 无迹卡尔曼滤波算法流程图

(12)

此处,采用对称采样策略选取Sigma点.无迹卡尔曼滤波中Sigma点的对称采样策略为:设xk的均值为x、方差为Px,则可产生一个L矩阵,该矩阵由2n+1个列向量组成.
为消除采样的非局部效应,对原始Sigma点集进行比例修正,各个Sigma点的权值为:
式中:Wim为均值的权;Wic为方差的权;λ为调节参数.
(13)
为保证方差矩阵的半正定性,选择κ=0.参数α表示测试点偏离期望值的程度,通常是一个非常小的正数,即0<α<10-4.β用来描述x的分布信息(高斯分布情况下β=2为最优).
3 仿真验证
为验证文中基于无迹卡尔曼滤波方法进行车辆重心高度在线估计的算法准确性,采用TruckSim与MATLAB/Simulink联合仿真.选取车辆参数见表1.
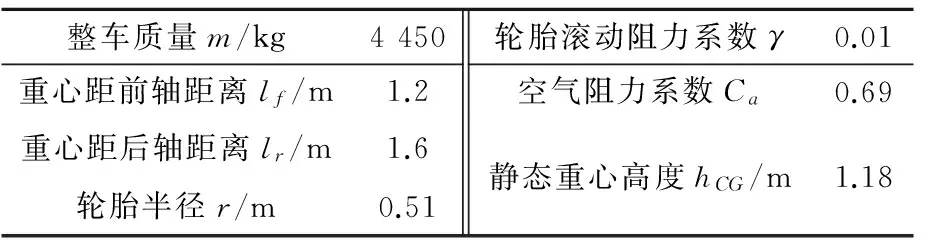
表1 仿真车辆模型部分参数表
3种道路环境参数见表2,车辆在这3种道路上的车速变化均从50 km/h加速至75 km/h,并利用上述算法在线估计车辆重心高度.通过联合仿真实验分析,得到如图3~5所示的车辆轮速、车速的估计值,以及如图6所示的车辆重心高度估计值.
由图3~5可知,车速、前轮转速、后轮转速的估计值均较快逼近真实值,并稳定在真实值附近.可见,无迹卡尔曼滤波的状态估计量与观测量具有较好的一致性,能够稳定、可靠地实现对系统状态的观测.
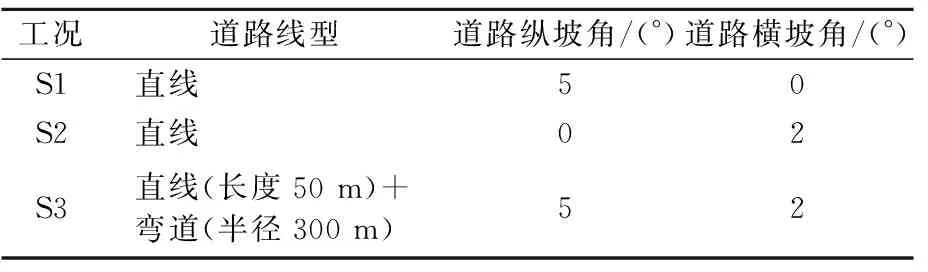
表2 仿真实验的道路环境
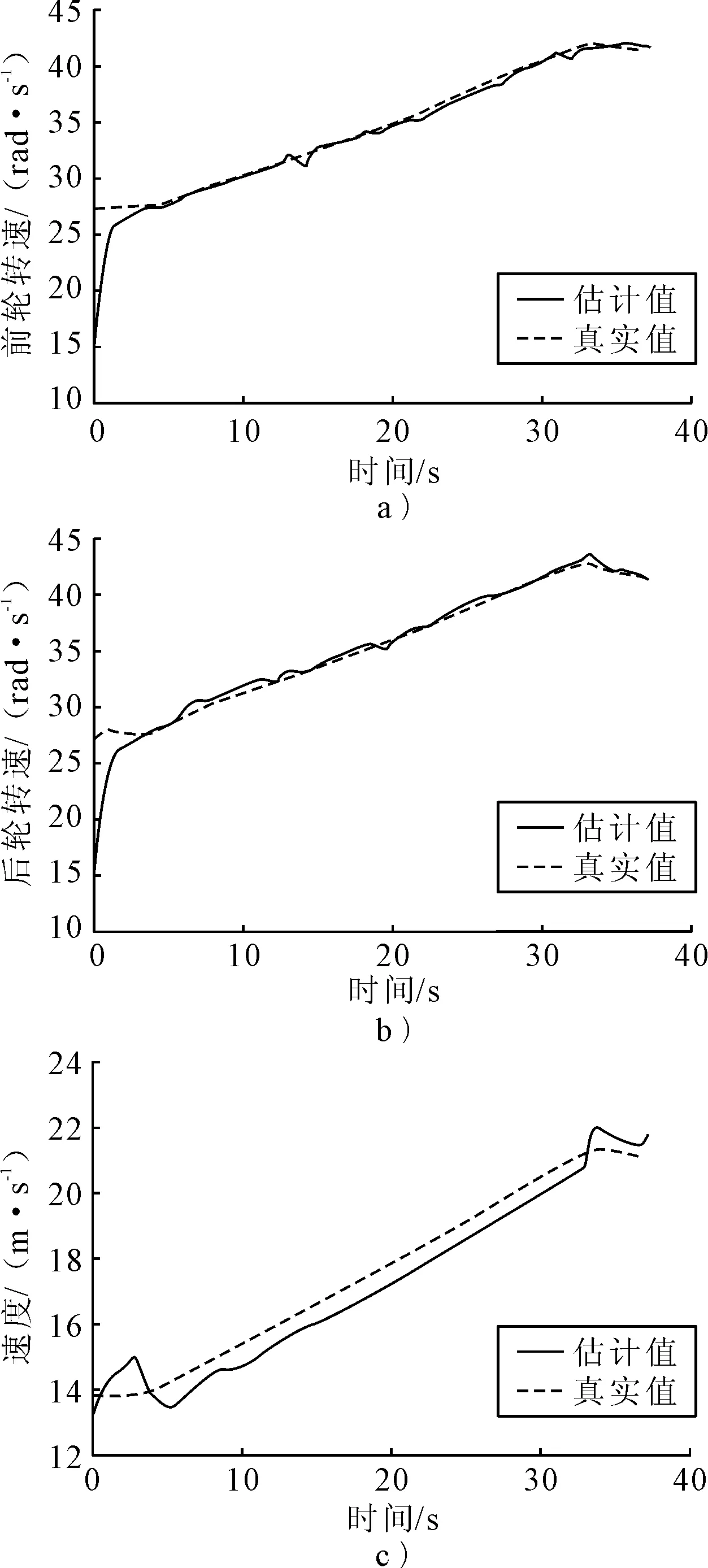
图3 工况一的实验结果
由图6可知,车辆在3种实验工况下的重心高度估计值虽与真实值(采用车辆静态时的重心高度值,即1.18 m)之间存在一定误差,但在经过一段时间后的估计值逐渐平稳,且平均误差控制在12%以内(见表3~4).
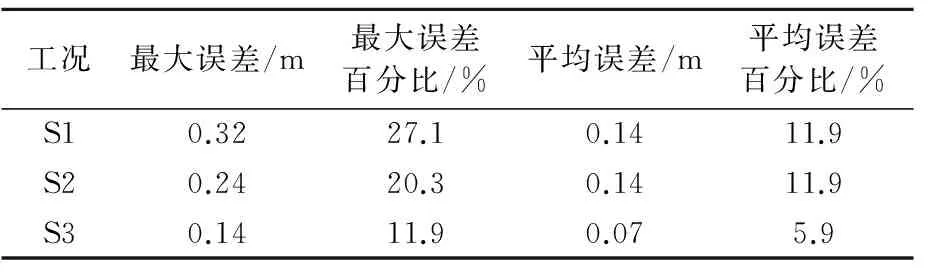
表3 重心高度估计值与真实值的比较(15 s之后)
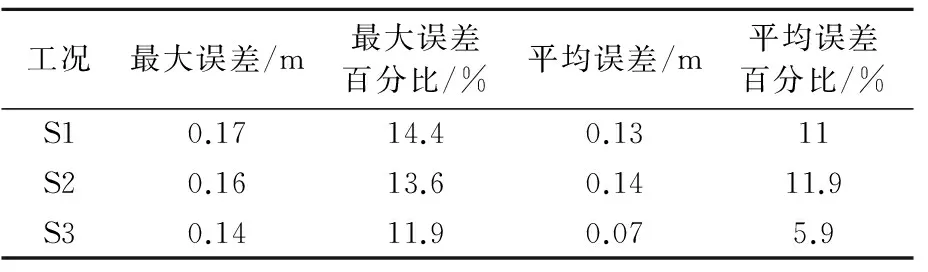
表4 重心高度估计值与真实值的比较(20 s之后)
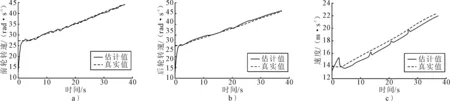
图4 工况二的实验结果
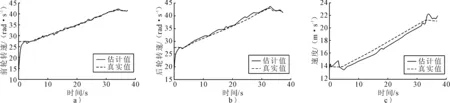
图5 工况三的实验结果
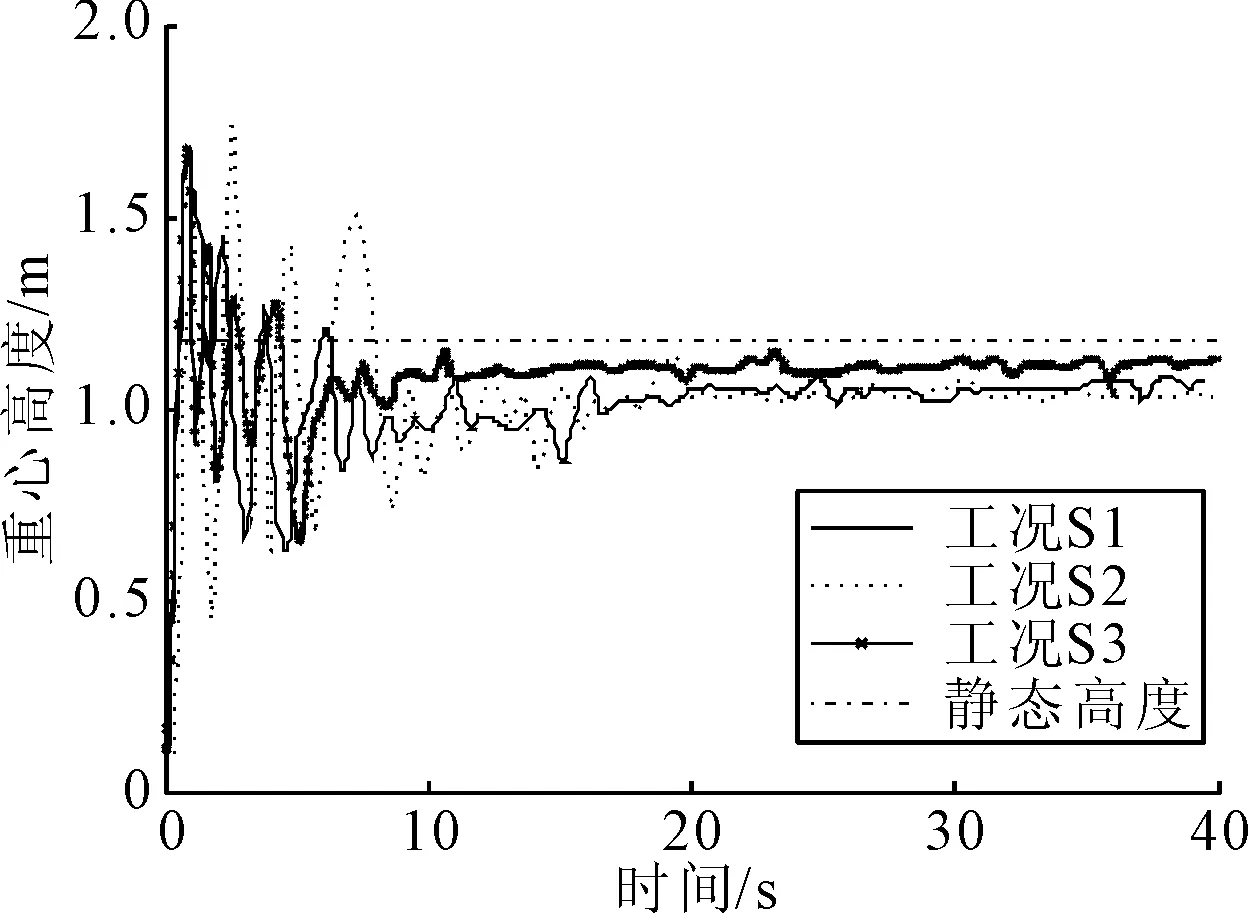
图6 重心高度估计结果对比
4 结 论
1) 提出了基于三自由度车辆动力学模型的无迹卡尔曼估计算法,能较好地获取车辆重心高度的真实值,估计值稳定后的平均误差在12%以内;
2) 利用上述算法估计的车辆重心高度能在较短时间内逼近参数真实值,具有较高的实时性,可满足对车辆主动预警及控制的要求;
3) 仿真实验与实际行驶工况仍存在一定差异,后期须通过开展实车实验,对在线估计算法的有效性进行实车验证.
[1]BIXEL R A, HEYDINGER G J, DURISEK N J,et al.Developments in vehicle center of gravity and inertial parameter estimation and measurement[J]. SAE Paper No. 950356, 1995.
[2]MANGO N.Measurement and calculation of vehicle center of gravity using portable wheel scales[J]. SAE Paper No.2004-01-1076, 2004.
[3]陈剑雄.汽车重心高度的测定方法[J].汽车技术,1988(7):22-25.
[4]郭洪艳,陈虹,赵海艳,等.汽车行驶状态参数估计研究现状与展望[J].控制理论与应用,2013,30(6):661-672.
[5]REZAEIAN A, ZARRINGHALAM R. Cascaded dual extended kalman filter for combined vehicle state estimation and parameter identification[J]. SAE Paper No.2013-01-0691, 2013.
[6]曾学科,陈雨人,王桀.基于ObjectARX的半挂车转弯检测系统开发与研究[J].交通信息与安全,2013,31(2):109-113.
[7]HUANG X, WANG J. Center of gravity real-time estimation for lightweight vehicles using tire instant effective radius[J]. Control Engineering Practice, 2013(21):370-380.
[8]HUANG X, WANG J. Real-time estimation of center of gravity position for lightweight vehicles using combined AKF-EKF method[J]. Vehicular Technology, IEEE Transactions on, 2014,63(9):4221-4231.
[9]RAJAMANI R, PIYABONGKARN D, TSOUR APAS V, et al, Parameter and state estimation in vehicle roll dynamics[J]. Intelligent Transportation Systems, IEEE T, 2011,12(4):1558-1567.
[10]HONG S, LEE C, BORRELLI F, et al.A novel approach for vehicle inertial parameter identification using a dual Kalman filter[J]. Intelligent Transportation Systems, IEEE Transactions on, 2015,16(1):151-161.
[11]YUE H, ZHANG L, SHAN H, et al. Estimation of the vehicle's centre of gravity based on a braking model[J]. Vehicle System Dynamics, 2015,53(10):1520-1533.
Online Estimation for Vehicle Center of Gravity Height Based on Unscented Kalman Filter
CHU Duanfeng1,2,3)TIAN Fei1,3)WU Chaozhong1,3)HU Zhaozheng1,3)PEI Xiaofei4)
(IntelligentTransportationSystemsResearchCenter,WuhanUniversityofTechnology,Wuhan430063,China)1)(BeijingKeyLabforCooperativeVehicleInfrastructureSystemsandSafetyControl,Beijing100191,China)2)(EngineeringResearchCenterforTransportationSafety,MinistryofEducation,Wuhan430063,China)3)(SchoolofAutomotiveEngineering,WuhanUniversityofTechnology,Wuhan430070,China)4)
The height of the Center of Gravity (CG) for heavy-duty vehicles will drift apparently when the load changes, while the accurate and real-time recognition of vehicle's CG height is of extremely importance to the vehicle's active safety system. An unscented Kalman filter based on three degree of freedom (3-DOF) vehicle dynamics model is proposed to acquire the real time value of vehicle CG height through sensing the vehicle speed, front and rear wheel speed etc. The results of combined simulation studies based on TruckSim and MATLAB/Simulink show that the estimation algorithm is able to obtain to the true value of CG height in a short time with steady-average error less than 12%. The results are instructive for the dynamic control of driver assistance system.
center of gravity height; parameter estimation; unscented Kalman filter; vehicle dynamics
2016-07-12
U463.33
10.3963/j.issn.2095-3844.2016.04.011
*“十二五”国家科技支撑计划课题专项经费(2014BAG01B03)、湖北省自然科学基金项目(2015CFB252)、车路协同与安全控制北京市重点实验室开放基金项目(KFJJ-201401)资助
褚端峰(1983- ):男,工学博士,副研究员,主要研究领域为交通安全
猜你喜欢
鸭绿江(2021年26期)2021-11-11
领导文萃(2021年5期)2021-04-02
中学生数理化·高一版(2019年12期)2019-12-31
电子制作(2019年23期)2019-02-23
中国钢铁业(2018年6期)2018-07-26
当代教育(2018年4期)2018-01-23
北京航空航天大学学报(2017年9期)2017-12-18
中国惯性技术学报(2017年1期)2017-06-09
电测与仪表(2016年21期)2016-04-11
中国石油大学学报(自然科学版)(2015年2期)2015-11-10
