
汽车雨刷机构创新设计研究
2016-08-23 03:47:49邵卫
现代制造技术与装备 2016年1期
邵 卫
汽车雨刷机构创新设计研究
邵 卫
(天津职业技术师范大学,天津 300222)
由机构运动本质的提炼,重构雨刷机构的运动,完成一理想的雨刷运动型态,创造新型肘式雨刷机构。此种雨刷机构扫掠范围比原车大,扫掠比率比原车雨刷机构多出至少14%以上。
汽车 雨刷 机构 创新 设计
创造、创新是一个国家、一个民族的灵魂,先进的创新方法是提升一个国家总体创新能力和创新水平的的关键。汽车是目前一种大量被使用的高科技个人化消费性产品,汽车一年小改款,三年大改款,当汽车改款时,雨刷机构必然或多或少地要跟着变更设计以符合新车体要求,所以进行新型雨刷机构创新设计是极为重要的一项工程。
1 雨刷机构基本构造与原理解析
汽车雨刷的主要功能是刮除附着在挡风玻璃污物,以确保驾驶者的视野清晰,汽车雨刷系统基本上包括“刷”和“洗”两个系统,甚至有些雨刷系统已经将这两部分的功能整合在一起。但就“刷”的部分主要构成包括电动马达与马达控制器、雨刷连杆机构、雨刷臂、雨刮片。
现在最常见的雨刷系统其运动方式是靠一曲柄连杆推拉一组四连杆机构,该四连杆的两支雨刷臂则分别属于输入杆与输出杆,整个连杆组形成六连杆机构。
2 雨刷机构的设计要求
在已知的挡风玻璃上尽可能的扫掠出最大面积与范;尽量使雨刷机构在停驻状态时不遮挡视线;机构简洁可靠、易制造、易装配、易保养、易维修;适用于大面积大曲度挡风玻璃。
3 雨刷机构形式合成—机构创新
(1)雨刷部件运动关系。机构运动形式根据不同的分类原则大概可分为以下数种:连续性、间歇性、周期性运动,直线、圆周、曲线运动;往复式、旋转式运动;主动与从动部可逆和不可逆运动等。检视雨刷机构并解析大部分汽车雨刷的扫掠动作可知:雨刷机构的扫掠动作可以分为雨刷片和雨刷臂的扫掠运动,两者之间存在着相对位置或相对运动的关系。雨刷臂相对于车体的运动方式有固定、旋转、平移(沿轴向/夹轴向)三种;雨刷片相对于雨刷臂的运动方式有固定、旋转、平移(沿轴向/夹轴向)三种。根据以上雨刷和雨刷臂的运动形式的分类,若以单雨刷和单雨刷臂的组合,并且不限制雨刷臂与车体接触(安装)的位置,可以有128种的组合。从实务上来看,雨刷臂若固定不动,只有靠雨刷运动可能造成雨刷(片)构造复杂,所以进一步将雨刷臂固定的可能性剔除,则成为96种运动组合。再者,机构尽可能置于挡风玻璃下缘以免遮蔽视线,并符合雨刷停驻点在下缘的条件,依此逐步加上限制条件,雨刷片和雨刷臂运动组合剩下至少有12种可能性,参考表1的初步组合。
将雨刷臂相对于车体的四种可能相对运动方式置于左边列为纵轴,而将雨刷相对于雨刷臂的四种可能相对运动方式置于上方列为横轴,构成一个运动形式与形能组合矩阵。解读收集到的专利资料或成品的构造,按照运动形式分类,发现有专利申请者集中以雨刷臂旋转运动搭配雨刷(片)平移运动的组合占绝大多数。
(2)建立雨刷理想运动图形。根据“简单机械构造、尽可能扫掠最大面积、雨刷机构有创新”的三原则,结合汽车玻璃承受正向风压的弧度造型,满足自挡风玻璃下缘向A柱两侧往复扫掠的方式,以保证雨刷机构的雨刷片扫到接近A柱附近仍具又绝佳清除效果的实用性,参照雨刷机构创新的项目:采用单片雨刷扫掠、扫掠面积趋于最大、雨刷可以刷到与A柱平行、视线未被遮到的地方皆可扫到、雨刷停驻处不遮视线、构造趋于简单,勾勒出一种单一的雨刷臂相对车体旋转的理想化的雨刷扫掠范围图形,见图1。

表1
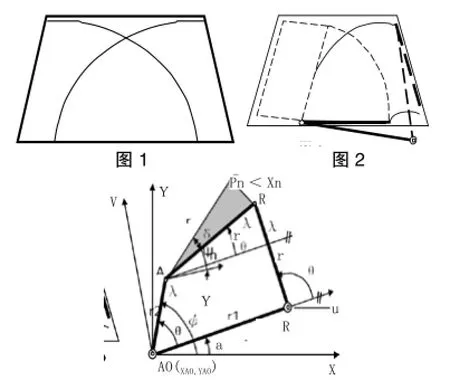
图3
进一步利用雨刷相对雨刷臂做旋转运动而且雨刷臂相对车体也做旋转运动的运动组合,基本上可以获致相当接近理想化的扫掠,但是当挡风玻璃为较扁平的形状时,其左下方将无法扫掠到。若雨刷和雨刷臂不再局限以单纯的运动方式做组合而使机件的运动方式呈现复合运动的话,雨刷臂与车体旋转运动、雨刷与雨刷臂旋转和平移组合,其扫掠方式见图2,则雨刷机构创新的形式基本成形——单雨刷片肘式雨刷机构。
4 雨刷机构的尺寸合成
(1)尺寸合成方法。尺寸合成方法有函数创生、运动创生和路径创生。函数创生的合成方法是指输入和输出之间有某特定的函数关系;运动创生则指最终输出的连杆被要求具有特定位置和姿态;路径创生是指特定输出的位置坐标点有一定的路径与时序关系。本案拟采用运动创生尺寸合成,利用特征平面法解答平面四连杆三个精确点的运动创生合成方法进行肘式雨刷机构的尺寸合成。尺寸合成又分为计算法和图解法,借助于计算机强大的计算能力,能快速得到比较精确的解答。
(2)四连杆三个精确点确定。根据四连杆运动创生合成的理论的相关公式,输入枢轴A0坐标位置(xA0,yA0)、连杆点运动的三精确点(xn,yn)和n、计算 R2、rA、sA和输入杆角度Φn,完成α、β解答平面,选择α和β角后算出λ1、λ2和λ3,终而完成符合三精确点的机构运动创合成。四连杆各杆件关系示意图如图3所示。
5 创新雨刷机构的运用
以某牌的车为例,其挡风玻璃的投影尺寸、雨刷尺寸和扫掠范围经测量后得知,通过A柱一侧的玻璃外框尺寸判断,若要采用本案创新雨刷机构的话,雨刷片最大长度绝对不宜超过 80.5cm,再者,A 柱侧的玻璃框与水平线夹角为82,这个角度便是雨刷机构合成做为参考的初步数据。经计算机计算并修正后得四杆机构的静件R1=3.1cm,输入杆30.7cm,连杆10.2cm,输出杆37.3cm。计算出雨刷扫描比例如表2。
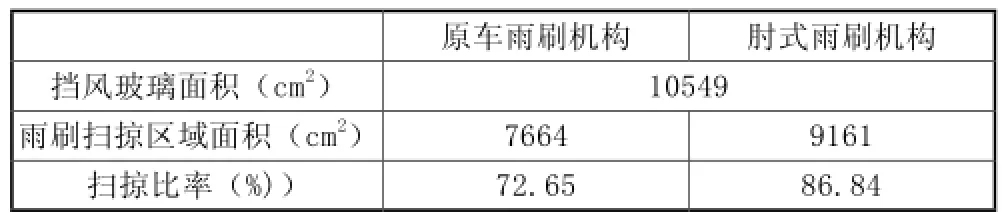
表2 扫掠比率之比较
6 结论
结果显示本创新的肘式雨刷机构不但可以应用在该型汽车,而且比原来的雨刷机构有更大的扫掠比率(多14%以上),此外,还能有效的扫掠到挡风玻璃更重要区域。
[1]符炜.机械创新设计构思方法[M].长沙:湖南科学技术出版社,2005.
[2]张策.机械原理与机械设计[M].北京:机械工业出版社,2004.
[3]王玉新.机构创新设计方法学[M].天津:天津大学出版社,1996.
[4]雷永刚,彭颖红.阮雪输机械产品概念设计:综述与分析[J].机械科学与技术,2000,(1):19-21.
Innovative Design of Automobile Wiper Mechanism
SHAO Wei
(Tianjin Vocational and Technical Normal University,Tianjin 300222)
The kinematic nature of refining, the reconstructed wiper mechanism to complete an ideal wiper motion patterns, create new toggle wiper mechanism. Such wiper mechanism swept large range than the original car, sweep rate is at least 14 percent morethan the original car wiper mechanism .
cars, wipers, institutions, innovation, design
猜你喜欢
公民与法治(2022年10期)2022-10-12 07:46:14
汽车实用技术(2022年15期)2022-08-19 02:30:06
妇女(2019年5期)2019-07-02 07:58:08
作文·初中版(2017年10期)2017-10-25 10:09:40
电力系统及其自动化学报(2016年5期)2016-12-01 03:13:00
人民交通(2015年2期)2015-12-02 03:20:22
科学启蒙(2015年6期)2015-08-04 03:51:48
焊接(2015年1期)2015-07-18 11:07:33
焊接(2015年1期)2015-07-18 11:07:33
机械制造与自动化(2014年1期)2014-03-01 04:21:44
