三轴数控平面磨床几何精度分析与稳健设计
2016-08-12 00:36刘江南洪义海
湖南大学学报·自然科学版 2016年4期
刘江南 洪义海
摘要:为了经济合理地分配三轴数控平面磨床零部件几何精度,提出了一种几何精度分析设计的方法。针对磨床具体结构,基于多体系统理论和齐次坐标变换方法,建立了磨床几何误差传递模型,并通过试验验证了该模型具有理想的预测性能;根据误差传递模型,运用正交试验设计和参数试验的试验设计方法分析识别了影响磨床加工精度的11项关键几何误差因素;基于稳健设计理论,在成本分析和误差溯源基础上,建立了11项关键几何误差因素下的磨床成本质量模型,并运用该模型对关键几何误差因素的公差进行了稳健设计。研究结果表明:上述方法能实现对磨床几何精度的经济合理的分配。
关键词:平面磨床;多体系统;几何误差;误差模型;稳健设计
中图分类号:TH161 文献标识码:A
影响机床加工精度的各类误差主要有机床零部件的几何误差、热误差、载荷误差和伺服误差等,其中几何误差所占比重达25%~35%,故对几何精度的分析与研究是精度设计的主要工作。传统精度设计主要是经验设计,依靠经验的方法分配机床各零部件的公差等级。由于各环节误差对机床整体加工精度的影响程度不同,而且其精度控制实现的难易程度也不一样,传统的经验设计方法已经难以满足日益提高的精度要求,因此,为满足机床加工精度的要求,建立机床的误差传递模型,分析影响机床加工精度的关键误差因素,并合理分配机床零部件的精度显得尤为重要。
建立准确有效的几何误差传递模型则是对几何精度进行分析和研究的首要条件。目前,以多体系统理论结合齐次坐标变换为基础的误差建模与分析方法已被普遍采用。基于该方法,国内外众多学者在误差建模、误差分析等方面取得了一系列的进展。在分析及识别影响加工精度的关键几何误差因素方面,黄强等以滚齿机YK3610为对象,介绍基于多体系统理论和齐次坐标变换的机床误差建模方法,并依托该模型对机床敏感误差辨识方法、步骤和关键点进行阐述。程强等基于多体系统理论构建加工中心的精度模型,并利用矩阵微分法建立四轴数控机床误差敏感度分析的数学模型,通过计算与分析误差敏感度系数,最终识别出影响机床加工精度的关键性几何误差。在分配机床零部件的精度方面,王禹林等基于多体系统理论建立螺杆转子磨床的精度模型,并综合考虑磨床整体精度和制造成本,提出一种精度分配优化方法,通过调整精度权数实现了不同应用需求的目标优化。余治民等基于多体系统理论建立龙门导轨磨床精度模型,分析了不同工作位置加工精度可靠性,针对最小可靠度工作位置进行灵敏度分析,并遵循精度均衡原则逐步优化误差变量的分布,实现了磨床精度的优化分配。但上述研究都没有把关键几何误差因素分析与识别和精度分配结合起来应用到机床的精度设计之中。
本文结合关键几何误差因素分析与识别方法和基于稳健设计理论的精度分配方法,对三轴数控平面磨床几何精度进行分析和设计。为有效识别影响磨床加工精度的关键几何误差因素,首先基于多体系统理论,建立三轴数控平面磨床的几何误差传递模型;然后采用正交试验设计和参数试验的试验设计方法分析识别关键几何误差因素;最后,建立关键几何误差因素的公差稳健设计的成本质量模型,从而对其公差进行稳健设计。
1 三轴数控平面磨床结构拓扑分析和几何误差分析
1.1 磨床结构及其拓扑分析
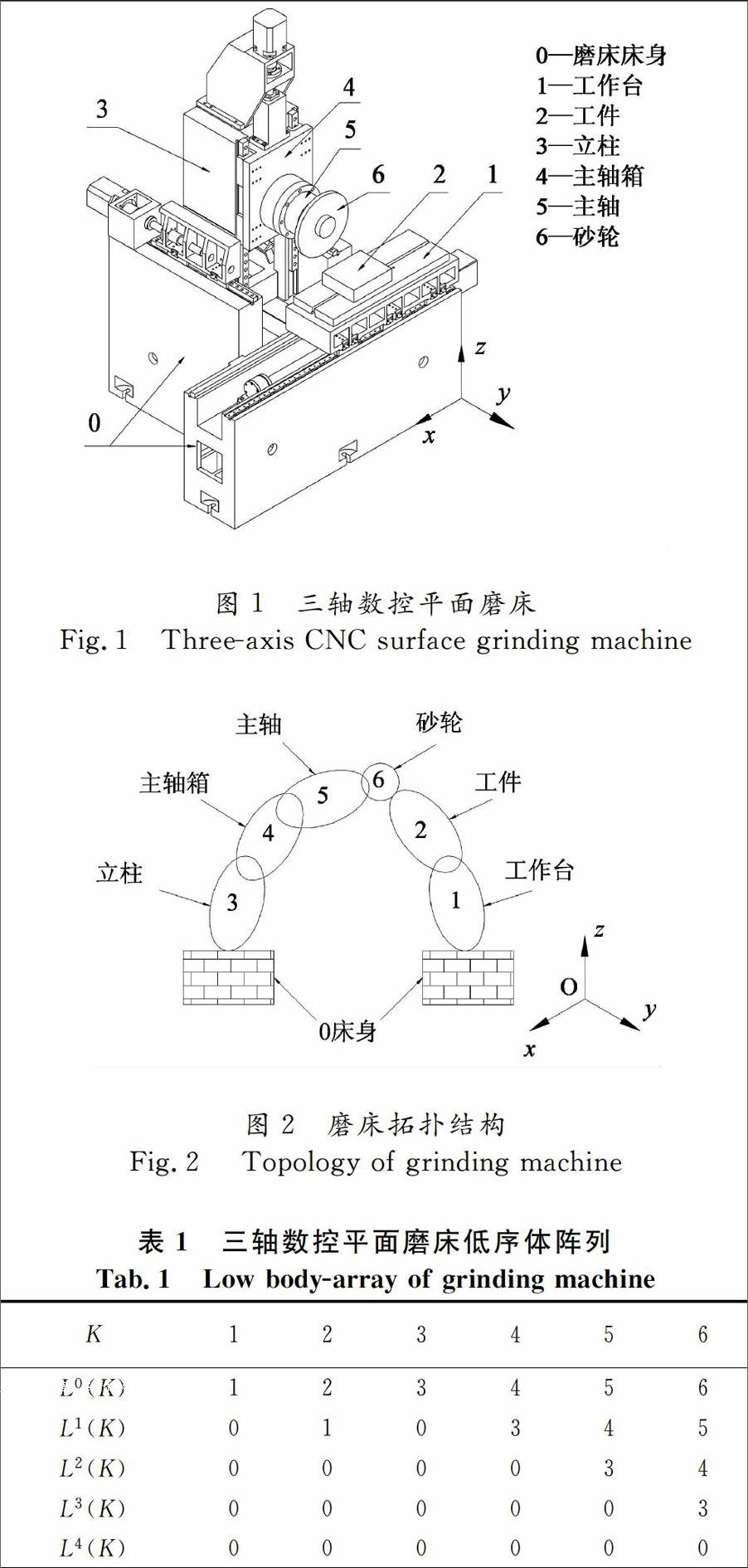
三轴数控平面磨床主要包括以下功能部件:前后床身、工作台、立柱、主轴箱、主轴和砂轮,具体结构如图1所示。其中工作台沿床身z向导轨作横向运动,立柱沿床身y向导轨作纵向运动,主轴箱沿立柱z向导轨作垂向运动,主轴及砂轮固定在主轴箱上。拓扑结构描述多体系统各体之间的连接关系,磨床即是一个典型的多体系统,为便于误差建模,对其进行拓扑分析,磨床拓扑结构及低序体阵列分别如图2及表1所示。其中L0(K)等为低序体算子。
1.2 三轴数控平面磨床几何误差分析
机床几何误差是指由组成机床各零部件的几何形状、表面质量及相互之间的位置误差等制造和装配因素所导致的机床误差。对于三轴数控平面磨床,当三平动进给轴x,y,z运动时,将分别产生6项几何误差。以x进给轴为例,当工作台沿x向导轨运动时,将产生3项线性误差:定位误差δxx,两直线度误差δyx与δzx,以及3项角误差:滚转角误差εxx,俯仰角误差εyx与偏摆角误差εzx,如图3(a)所示。另外,Y进给轴相对于X进给轴存在垂直度误差Sxy,Z进给轴相对于X和Y进给轴分别存在垂直度误差Sxz和Syz,如图3(b)所示。
综合可知,三轴数控平面磨床共有21项几何误差,表2详细列出了磨床各项几何误差的几何意义及其表达式。为便于区分,对于除三项垂直度误差以外的18项误差,其误差符号下标定义如下:第一个下标表示误差方向,第二个下标表示运动方向。
2 三轴数控平面磨床几何误差传递模型及其试验验证
2.1 三轴数控平面磨床坐标系的建立
为便于磨床的误差建模,应建立磨床床身上的基坐标系和各部件上的局部坐标系。具体设置如下:
1)在磨床床身上建立基坐标系O0x0y0z0,其x,y,z轴方向分别与X,Y,Z三进给轴理想运动方向一致。
2)分别在工件链部件和刀具链部件上建立局部坐标系Oixiyizi(i=1~6),各坐标系方向对应平行。并设坐标系Oixiyizi(i=1~6)与基坐标系O0x0y0z0重合,以便于建模。