
青海湖容积测量中关键技术的应用
2016-08-11 07:24金炎平邵永生龙娇荣
水利水电快报 2016年7期
金炎平 邵永生 罗 兴 金 勇 龙娇荣
(1.长江水利委员会水文局 长江中游水文水资源勘测局,湖北 武汉 430012;2.浙江省大成建设集团有限责任公司,浙江 杭州 310012)
青海湖容积测量中关键技术的应用
金炎平1邵永生2罗兴1金勇1龙娇荣1
(1.长江水利委员会水文局 长江中游水文水资源勘测局,湖北 武汉430012;2.浙江省大成建设集团有限责任公司,浙江 杭州310012)
摘要:青海湖是我国最大的咸水湖,由于湖泊面积大,且当地气象变化复杂,以前从未开展过湖泊测量工作。鉴于此,通过对青海湖容积测量工作中关键技术的应用,在湖泊测量与容积量算过程中,对建立控制网、水下地形测量、容积量算3个主要技术节点中的关键技术进行技术总结,可为以后同类型的湖泊测量借鉴。
关键词:咸水湖;地形测量;容积测量;青海湖
2011年12月27日,水利部水文局(水利信息中心)在北京召开《第一次全国水利普查青海省青海湖容积测量》成果审查会,成果获得与会专家认可和赞誉,一致认为项目执行单位在高海拔且复杂的气象条件下,通过精心组织,克服风大浪高的困难,首次系统地对青海湖进行了容积测量,其成果可作为重要的基本国情信息之一,填补了青海湖没有湖泊容积历史资料的空白,对青海湖的综合开发、生态保护等具有重要意义。
青海湖容积测量工作内容包括测区勘察、测区基本控制网建立、青海湖1∶50 000水下地形测绘、青海湖水下地形图与航测地形图套绘、湖泊容积计算等。从工作内容中的技术节点来看,其关键性技术主要体现在湖区基本控制网的建立、水下地形测量和容积量算。本文就这3个方面进行了重点阐述。
1 建立湖区基本控制网的关键技术
1.1网点布设
根据设计要求,在测区范围内布设8个GPS点(如图1),其中GODK、G175、IGL1 3个点为具有高等级CGCS 2000坐标,TIAN(Ⅱ天岔24)、XIAO(校2)、GODK(Ⅱ天岔46)、IGL1(Ⅰ格兰102基1)具有高等级水准高程。新增设的Q001、Q003、HXS0点以石刻标记点名,标心为测绘钉标。
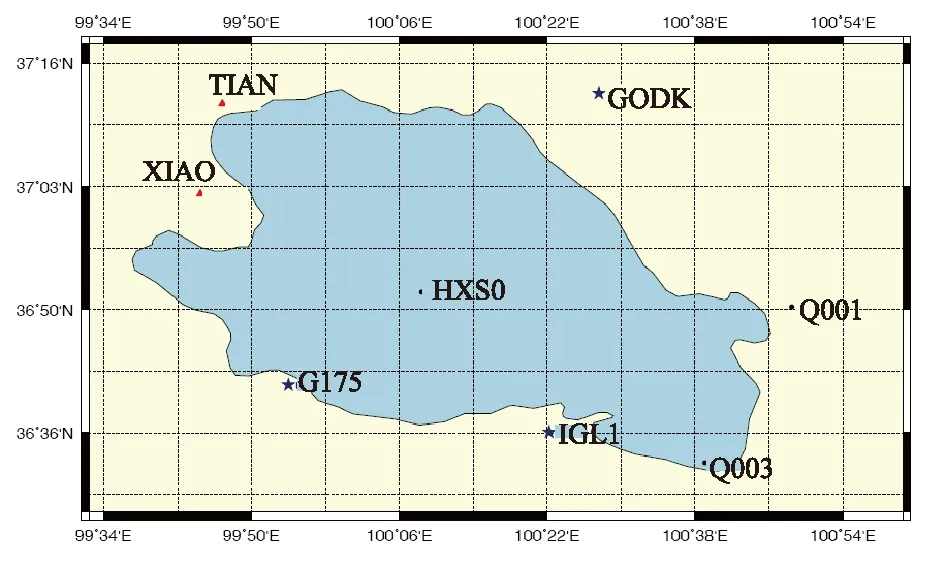
图1 控制网点位示意
1.2GPS网观测
2011年7月15~16日,测量队员克服种种困难,共观测了3个时段。7月15日测量队利用7台GPS接收机观测了2个时段,同步时段长均为60 min;7月16日利用3台GPS接收机观测了1个时段,同步时段长为72 min,历元间隔均为15 s。经GPS数据预处理软件TEQC 质量检查,观测质量基本满足设计要求[1]。
1.3GPS网数据处理
GPS网数据处理采取了两种方案,具体对比见表1。

表1 GPS网数据处理方案对比
(1) 在方案1中,采用徕卡数据处理软件(LGO),利用广播星历进行基线处理,输出基线解在COSAGPS数据软件进行网平差计算。
(2) 在方案2中,使用精密GPS基线解算软件(GAMIT),利用精密星历进行基线处理,输出基线解在精密GPS数据平差软件(GLOBK)进行网平差计算。
以上两种数据处理方案,采用的数据星历、基线解算模型、基线处理软件、平差方式、平差软件均不同,处理结果都比较好。经过比对新增网点的成果,差值统计如表2所示。
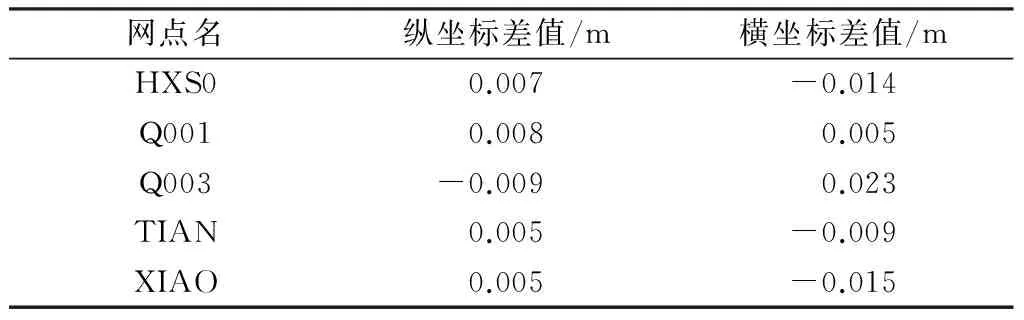
表2 两种数据处理方案成果差值统计
统计表明,两种结果差值比较小,成果能够相互印证。因此,GPS网数据处理结果是可靠的。
1.4控制网高程基准的建立
控制网点利用的已知水准控制点数目少,采用常值拟合的方法,得到大地高和似大地水准面之间的差距。然后,求取近似水准高和水准高之间的差距平均值(常值拟合)。最后利用计算得到的平均值(改正量)和各点的近似正常高(由青海省似大地水准面计算得到的近似水准高),便可以得到各控制点的水准高。验证高程拟合精度,选取4个已知大地经纬度、大地高的点,得到的水准高程与已知的水准高程差值,其结果如表3所示,拟合方法精度优于6 cm,满足项目设计要求。
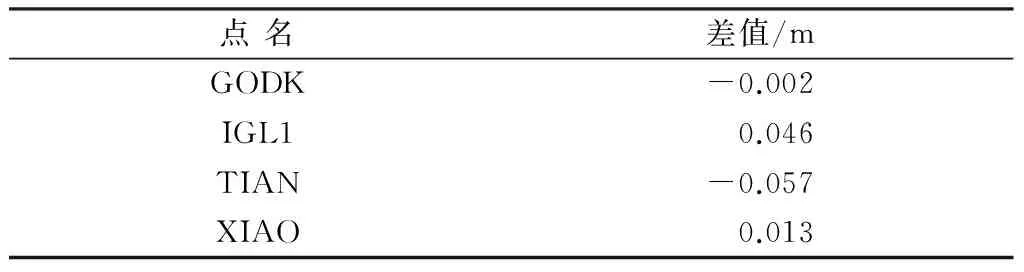
表3 拟合水准高与已知水准高差值
2 水下地形测量中的关键技术
2.1测线设计
青海湖东西向长约109 km,南北向约65 km。沿东西向布置主测线167条、测线间距850 m,测点间距400 m,见图2。

图2 青海湖水深测量主测线布设示意
2.2水位站布设
水位是水域测量的基础。针对高原湖泊——青海湖湖区面积大的特点,为有效控制测量期沿湖泊东西、南北向水位变化,测量队于2011年7月10~15日在湖西端、东北部、东南部及湖心分别布设鸟岛、甘子河河口、下社、海心山4处临时水位站,见图3。其中,下社水位站为青海水文局于1983年迁移设立,观测至今。

图3 青海湖临时水位站布置示意
2.3水位站的校核水准点高程
临时水位站设置校核水准点2点和1组直立式水尺,安装压阻式水位自记仪1套。
鸟岛、甘子河河口水位站的校核水准点高程,布设支线水准路线,使用自动安平水准仪,以四等几何水准精度测量[2]。
海心山水位站的校核水准点高程,以HXS0、鸟岛校1为引据点,采用GPS RTK方式测量。由于鸟岛与海心山之间距离较远(约20 km),进行GPS RTK 测量时,在数据链传输中使用了中继站技术。该项技术即在基准站与流动站之间,设置一套中继数据传输设备转发基准站的差分信号,扩大RTK基准站差分信号的覆盖范围。工作原理见图4。
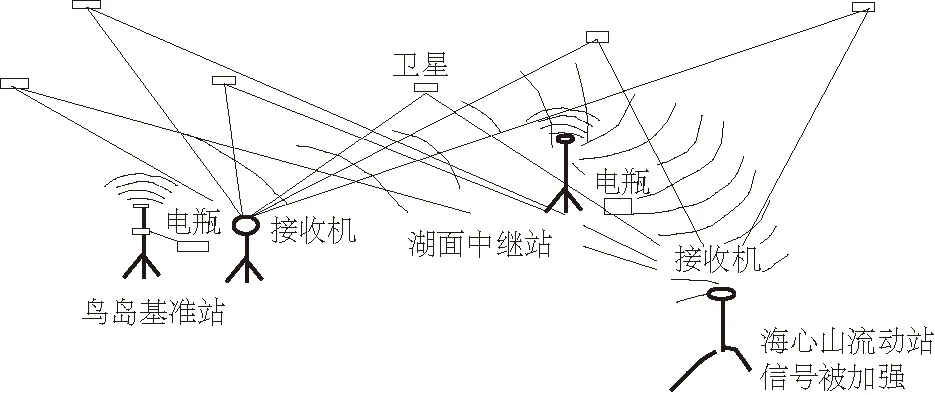
图4 中继站工作原理
m
2.4水位观测
测量期,湖区各水位站的水位使用压阻式水位自计仪观测,数据采样间隔1 h。7月15日、7月22日和8月4日,即开展水域测量前、测量中期和结束时,在每一临时水位站测量队使用直立式水尺观测水位,用以率定自记仪测量水位的精度,连续观测30 min(采样间隔5 min),其人工观测水位与自记水位的误差均小于2 cm,其观测误差见表4。自记仪记录水位与临时水尺水位比对精度统计如表4。

表4 自记仪水位与临时水尺水位对比
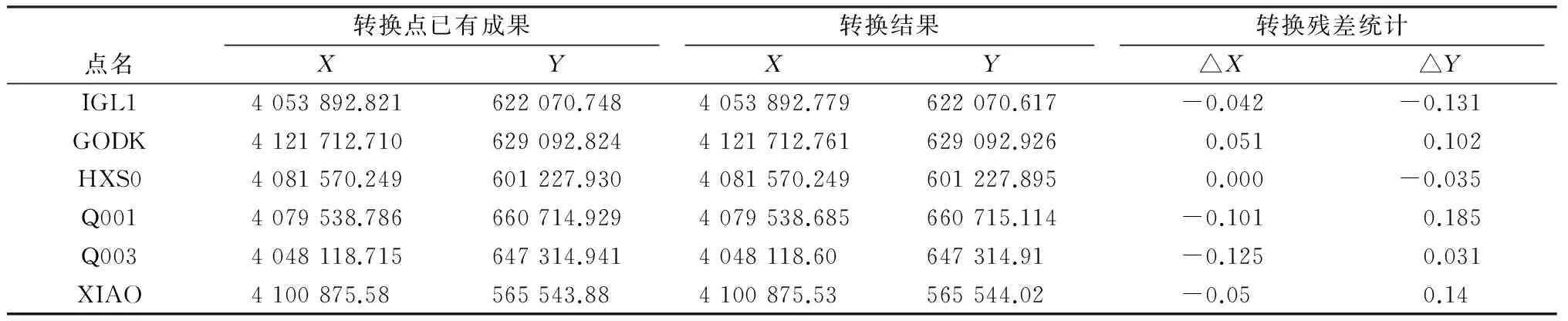
2.5平面定位参数求取
使用星站GPS采集测区控制点WGS84坐标,求取平面转换三参数,进行坐标转换,统计其转换残差,结果见表5。从结果可以看出,所求的三参数在整个测区转换精度均优于 0.2 m,与星站差分GPS本身的标称精度相当,说明参数精度较高,满足技术要求。
2.6水深测量
青海湖容积测量采用了Odom ECHOTRAC MKⅢ、Odom HYDROTRAC、HY1600等3种测量仪。 测量仪采用船舷外挂安装在船体中部,传感器入水深 0.5 m。GPS天线位于传感器正上方。
青海湖是中国第一大咸水湖,含盐度约为12.5‰。水深测量中的声速受到水温和含盐度的影响。2011年7月18日,测量队使用水温计在湖区中部分别量取水体表层(入水0.5 m)、底层(入水25 m)水温,其温差为 1.8℃,测深仪测深 25.6 m与测深锤测深较差 0.2 m。
每天水深测量前,使用水温计和盐度仪测量水体水温和盐度,使用GB/T 12327—1998《海道测量规范》规定的声速公式计算应用声速,进行测深检验[3]。测深检验方法是使用测深仪、测锤测量同点水深(水深大于5 m)。如果同点水深互差小于 0.1 m,满足设计书要求后,即进入水深测量。测量时,施仪人员密切监控测深仪、水深测量记录,出现零线漂移、不定标等现象立即停测。排除故障后,重新做水深检测后,再进入水深测量工作。
C=1449.2+4.6T-0.055T2-0.000 29T3+
(1.34-0.01T)(S-35)+0.017D
(1)
式中,C为声速,m/s;T为水体水温,℃;S为水体含盐度,‰;D为测区平均水深,m。
2011年8月4日,使用Odom ECHOTRAC MKⅢ、HY1600两种测深仪在84和85两条测线上同步比测水深,同点水深互差均小于 0.1 m。即两种测深仪测深精度可靠,置入的校正声速等参数正确[4]。
2.7水涯线测量
2000年以来,青海湖湖水位整体稳定,多年平均湖水位 3 194.42 m,年内水位变幅约 0.36 m。采用实测水涯线数据(特别是湖区码头、桥梁等固定建筑物),与2011年6月青海湖区分辨率为 2.5 m卫片(南京水利科学研究院湖泊研究所提供)的水涯线数据比对,其最大位置误差小于 37.5 m,几何形状基本一致。因此,测量人员不能到达的沼泽区水涯线采用卫片数据。但经对湖区沼泽区域实地调查,沼泽区草高约20~40 cm,草地边沿与水涯线过渡区约有20~75 m带宽,沼泽区水涯线为草地与湖水体的明显分界线,与实际水涯线存在一定偏差。长江中游水文水资源勘测局所在的东部测区内,其北部存在无人沙漠区,同时还采用了国家减灾委员会2011年7月24日摄制的现时卫片(图5)需以验证(该卫片摄制时青海湖上空无云层遮蔽,水体清晰)。

图5 国家减灾委员会2011年7月24日摄制的卫星图片
2.8数据处理
水域地形测量数据主要包括水位观测数据、水深测量数据和定位数据。通常采用水文综合测量软件,对上述数据进行预处理,剔除粗差后,再编辑、合并。
2.8.1水位数据
青海湖地处青藏高原,水域宽广,气候复杂多变。测量期,常遇5~7级阵风,湖面风浪较大,各水位站自动记录的水位过程呈波浪状。先剔除水位数据粗差,按时间序列直线插补缺失的水位数据,再对各站的水位数据平滑处理,处理后的水位数据即为应用水位数据。
2.8.2水深数据
每日测量水深数据,次日完成合理性检查,剔除水深数据粗差。据统计,剔除水深数据粗差量仅为全部水深数据量的2%。按照JTJ203-2001《水运工程测量规范》中水深内业整理要求,当水深测量受风浪影响回波信号呈波浪状时,水深从距波峰1/3波高处量取,逐点核对、改算水深数据[5]。
水深数据改算到成图高程基准的处理方案是:将测点定位数据与水深数据合并,使用Hypack软件导入各水位站应用水位数据文件,以测量时间和测点距测区各水位站距离权重,计算测点应用水位并改算至成图高程基准。
3 湖泊容积量算中的关键技术
3.1量算方法
以2011年7月1∶50 000的湖区地形图为基础资料,以实测的地形散点和等高线作为DEM建模的基础数据,使用GeoHydrology 4.0软件构建DEM模型量算青海湖容积,并分析量算误差。
3.2容积量算
采用规则网格法计算湖泊容积,理论上网格越密计算精度越高,但是湖区地形图的测点间距最小400 m(水域部分),陆上测点更稀少,所以选择400 m×400 m网格大小,构建整个湖区基于正方形网格的规则网立体模型(DEM模型),对湖区三维立体表面用不同高程面进行切割,即可得到各高程面下的湖区面积和湖容积。对于某一水面高程,采用棱柱体积计算方式,计算每个网格底面至水面的体积,然后叠加得到某一水位下的总体积,即湖容积。使用GeoHydrology 4.0、Sufer 8.0软件量算青海湖容积成果。两种量算成果略有差异,容积较差的平均差为0.87亿m3,中误差为 0.35亿m3,说明成果是可靠的。
3.3量算精度
3.3.1误差因素
湖泊容积量算精度主要取决于DEM 精度,影响DEM 精度的主要因素为地形图精度(地区类别、成图比例尺)和DEM 生产中的相关因素。
3.3.2精度评价
依据青海湖2011年7月1∶50 000数字化地形图和以此取得的规则400 m×400 m DEM地形网格,选样数据最大高程3 195.00 m,最小高程3 167.48 m。计算数据中抽出28个高程数据,统计两种软件构建的DEM内插高程误差,见表6。
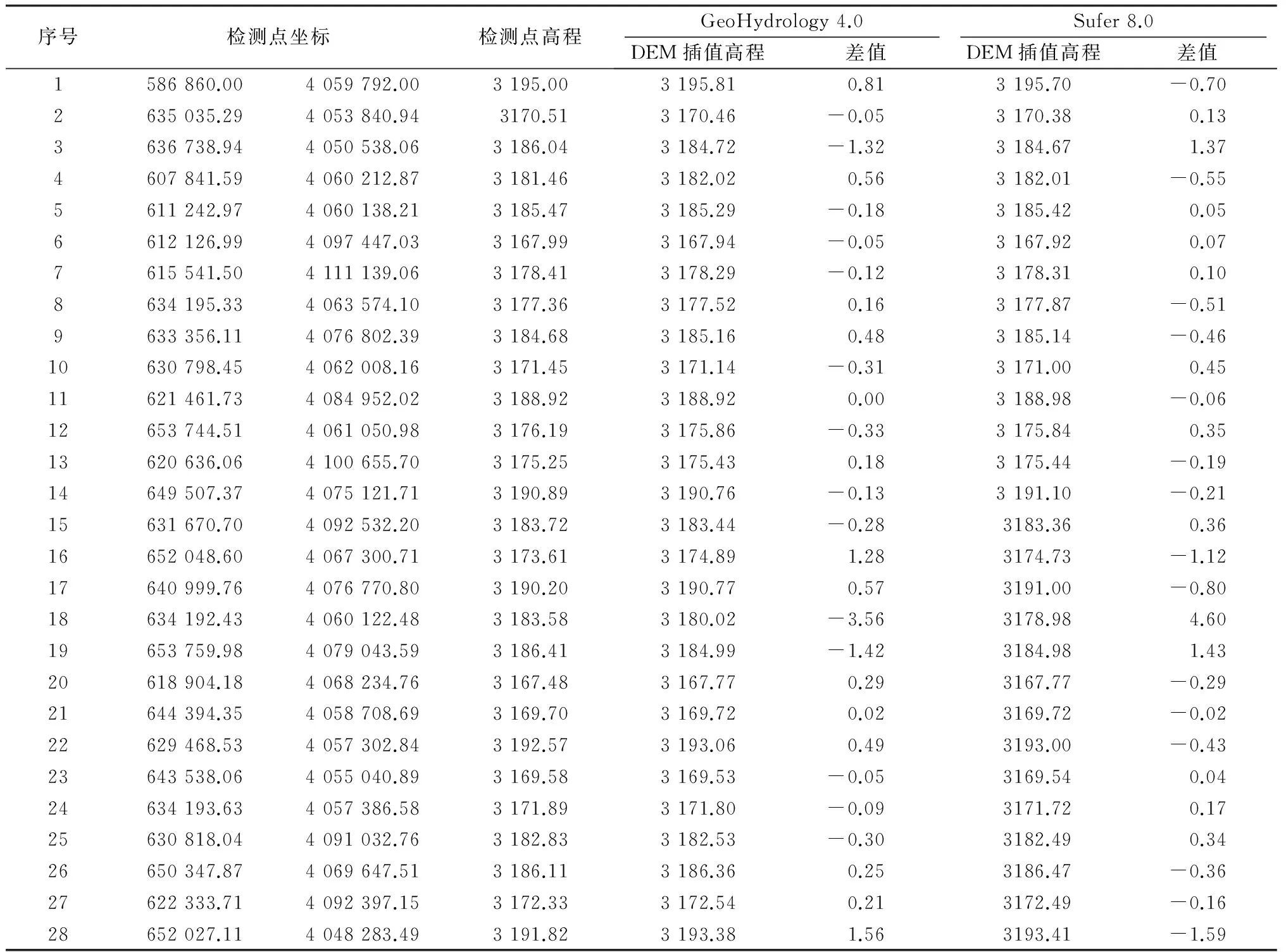
表6 内插点高程误差统计 m
表6统计结果表明,GeoHydrology 4.0软件构建的DEM内插点的高程精度略优于Sufer 8.0软件精度。统计以5 m步长,使用GeoHydrology 4.0软件计算各水位级下容积计算误差(见表7)。

表7 青海湖容积量算误差估算
4 结 论
青海湖容积测量取得成功,得益于以下关键性技术的运用。
(1) 控制网测量阶段,采用精密星历进行解算,并基于青海省似大地水准面精化模型进行高程拟合,所得结果既满足精度要求,也解决了局部控制难于引入的问题,效率倍增。
(2) 水下地形测量阶段,平面定位参数求取精度高,深度测量关键参数控制得当,水位站布设合理,水涯线采用最新影像匹配,精度满足要求。
(3) 容积量算阶段,采用计算的模型精度高,能够用不同软件对结果进行相互验证,保证了结果的严密性。
总之,青海湖容积测量中运用的关键技术,对于西部湖泊测量的开展具有较好的借鉴意义。
参考文献:
[1]GB/T 18314-2009 全球定位系统(GPS)测量规范[S].
[2]GB/T 12898-2009 国家三、四等水准测量规范[S].
[3]GB/T 12327-1998 海道测量规范[S].
[4]周丰年,赵建虎,周才扬.多波束测深系统最优声速公式的确定[J]. 台湾海峡,2001,20(4):411-419.
[5]JTJ 203-2001 水运工程测量规范[S].
(编辑:唐湘茜)
收稿日期:2016-05-15
作者简介:金炎平,男,长江水利委员会水文局长江中游水文水资源勘测局,高级工程师.
文章编号:1006-0081(2016)07-0022-05
中图法分类号:P331
文献标志码:A
猜你喜欢
河北水利(2022年10期)2022-12-29
海洋通报(2022年4期)2022-10-10
海洋信息技术与应用(2022年1期)2022-06-05
北京测绘(2021年1期)2021-02-05
小读者(2020年2期)2020-11-26
金桥(2020年7期)2020-08-13
散文诗(2019年21期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
学生天地(2016年22期)2016-03-25
浙江国土资源(2015年4期)2015-05-09
